Downloaded 10 times
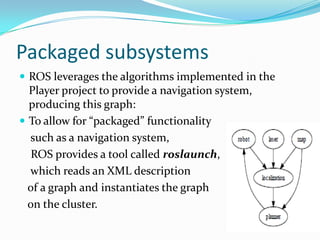

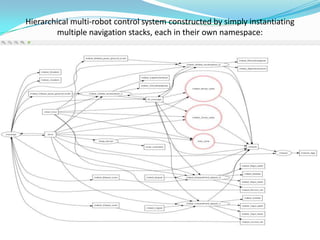


The document discusses the Robot Operating System (ROS). It provides an introduction and overview of ROS including its design goals and nomenclature. It then describes several key use cases of ROS like debugging individual nodes, logging and playback capabilities, developing packaged subsystems, enabling collaborative development, providing visualization and monitoring tools, supporting composition of functionality through packages and stacks, and handling transformations between reference frames.