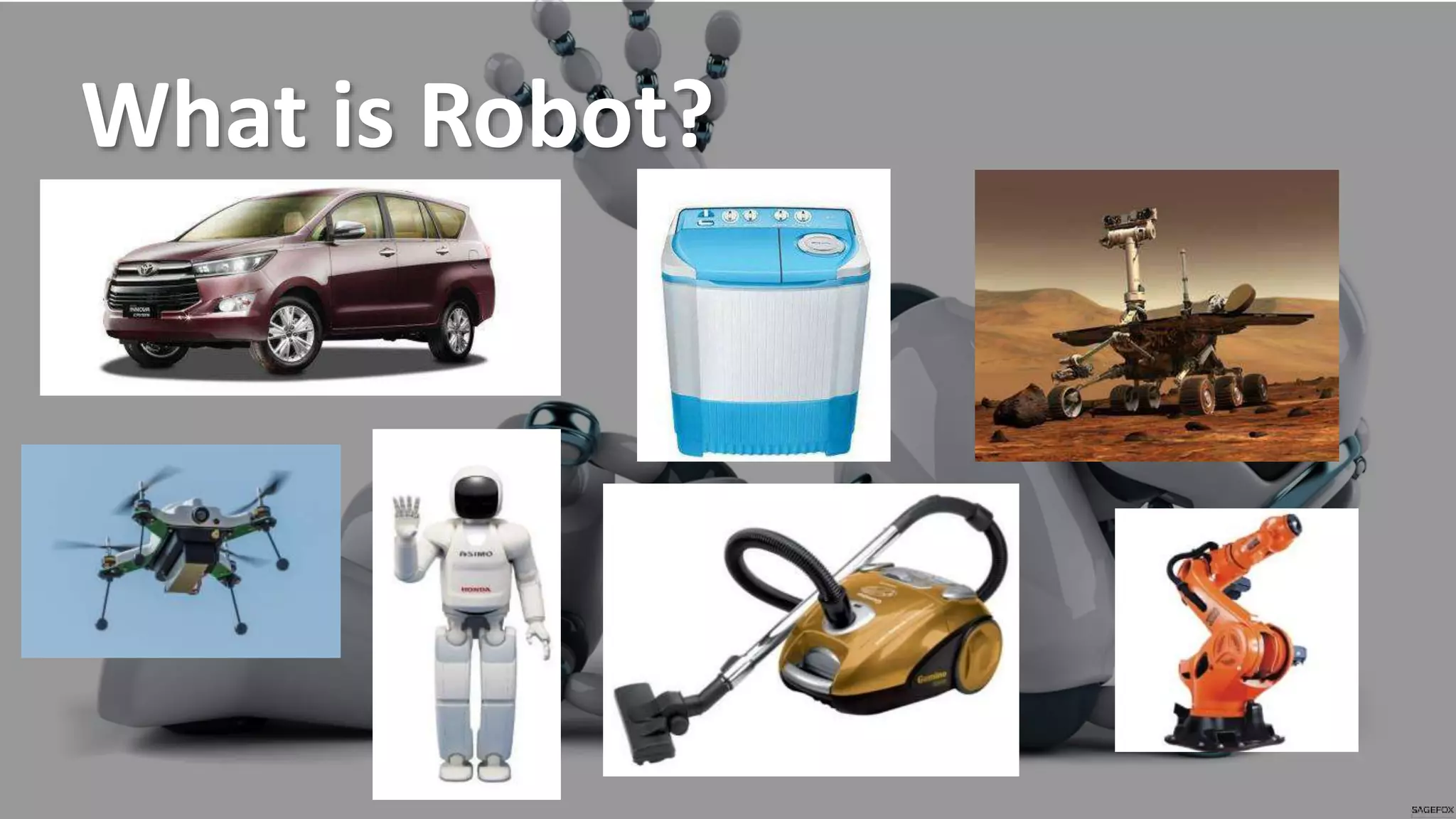
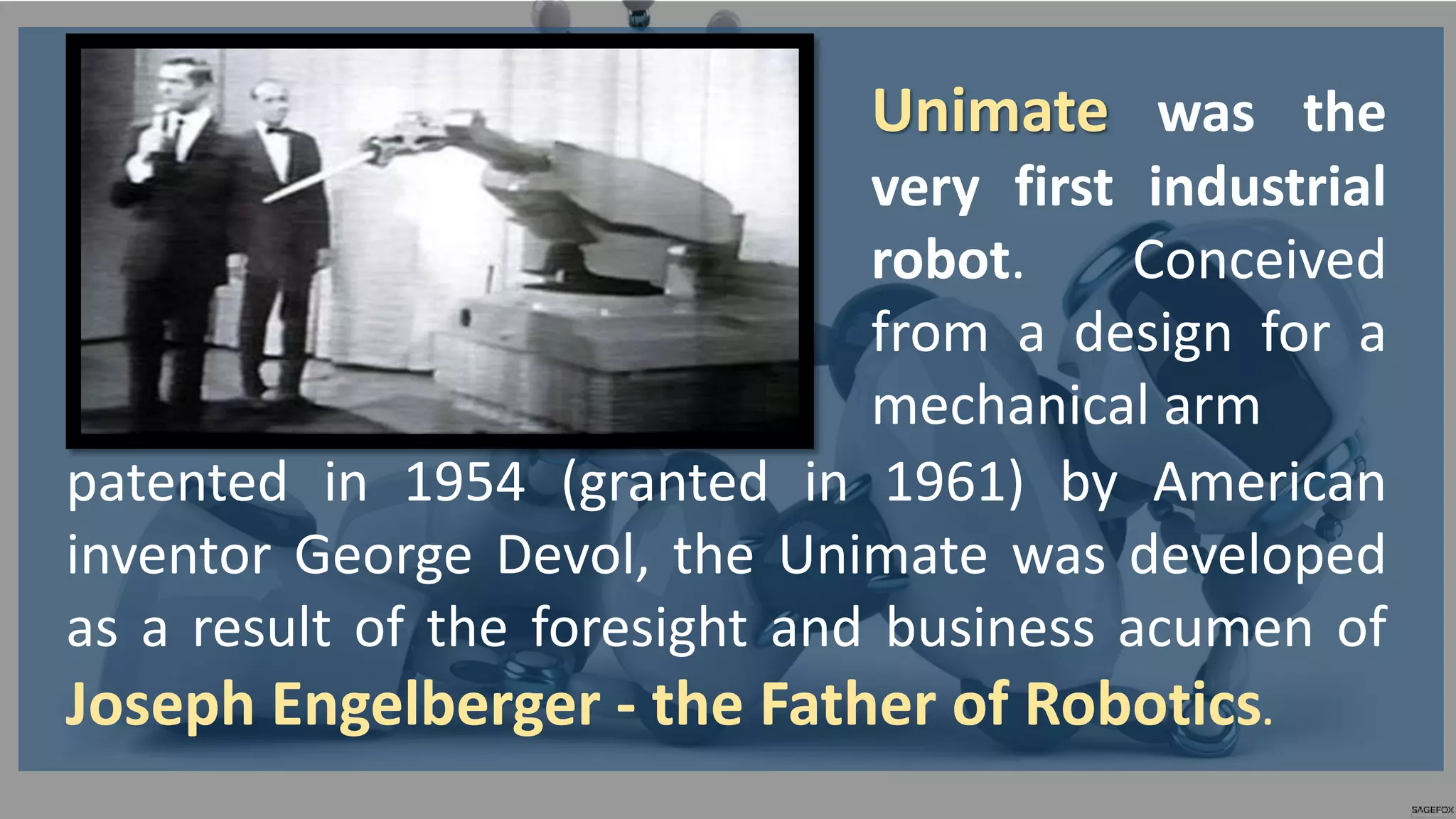
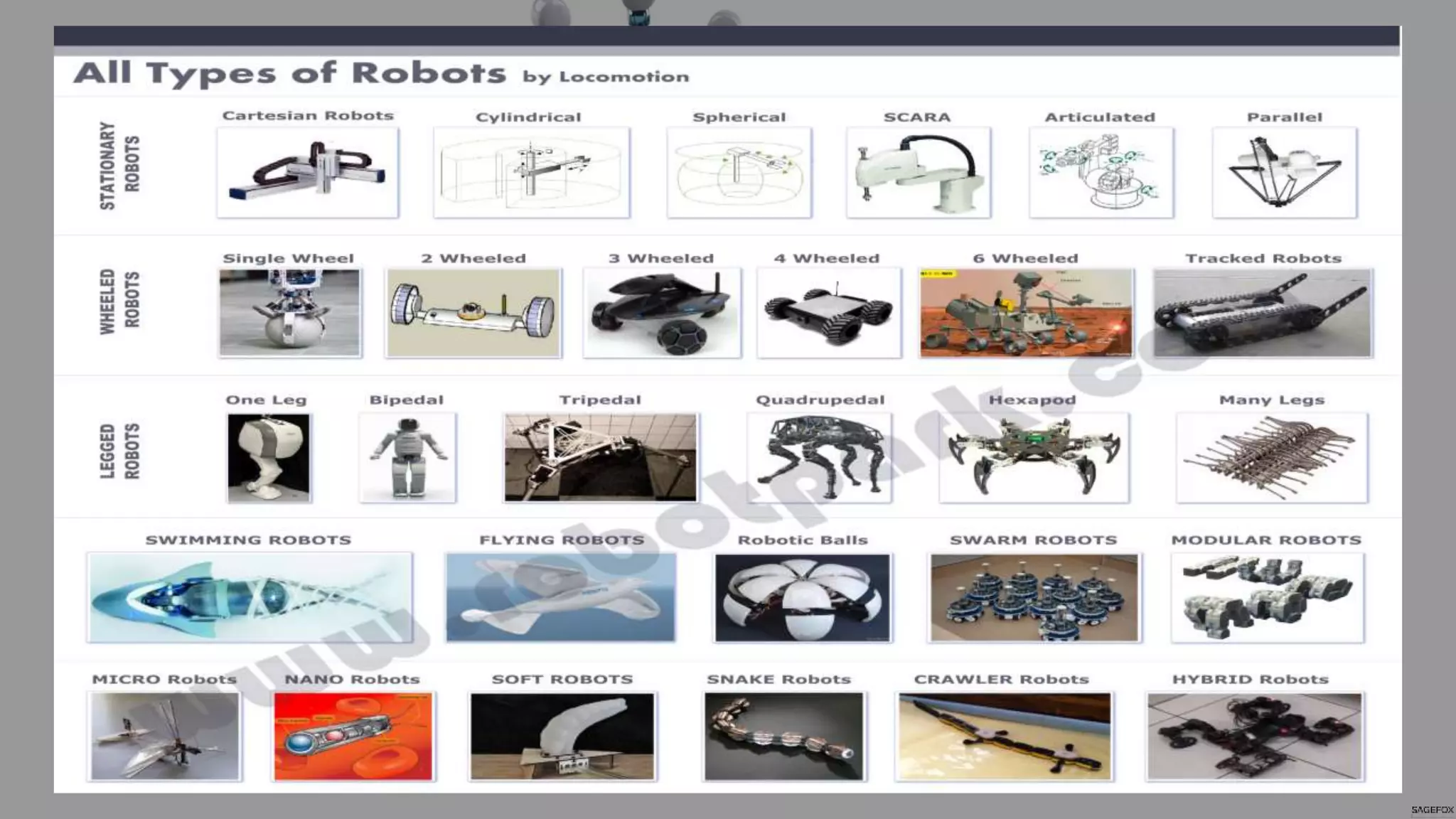
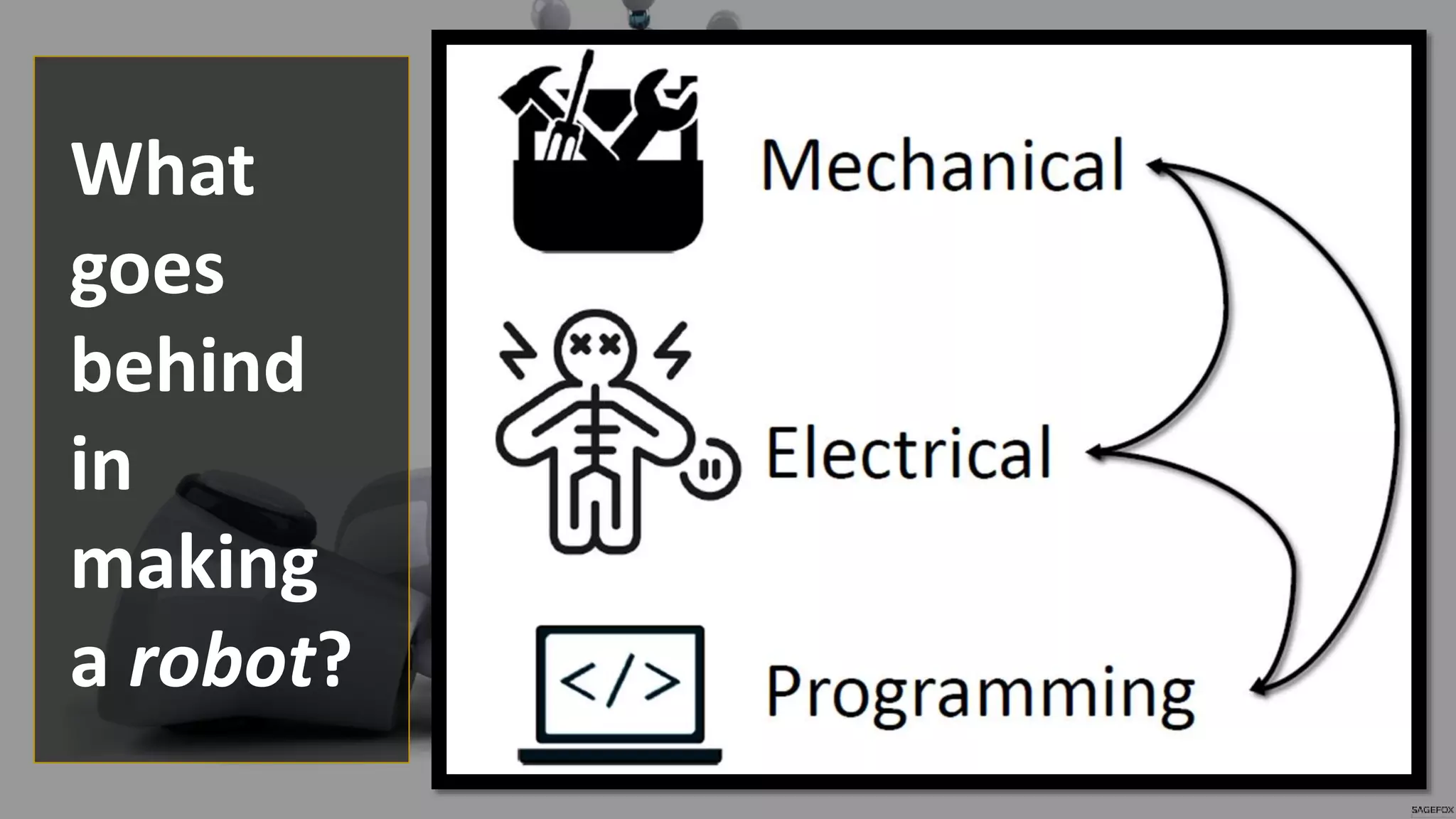
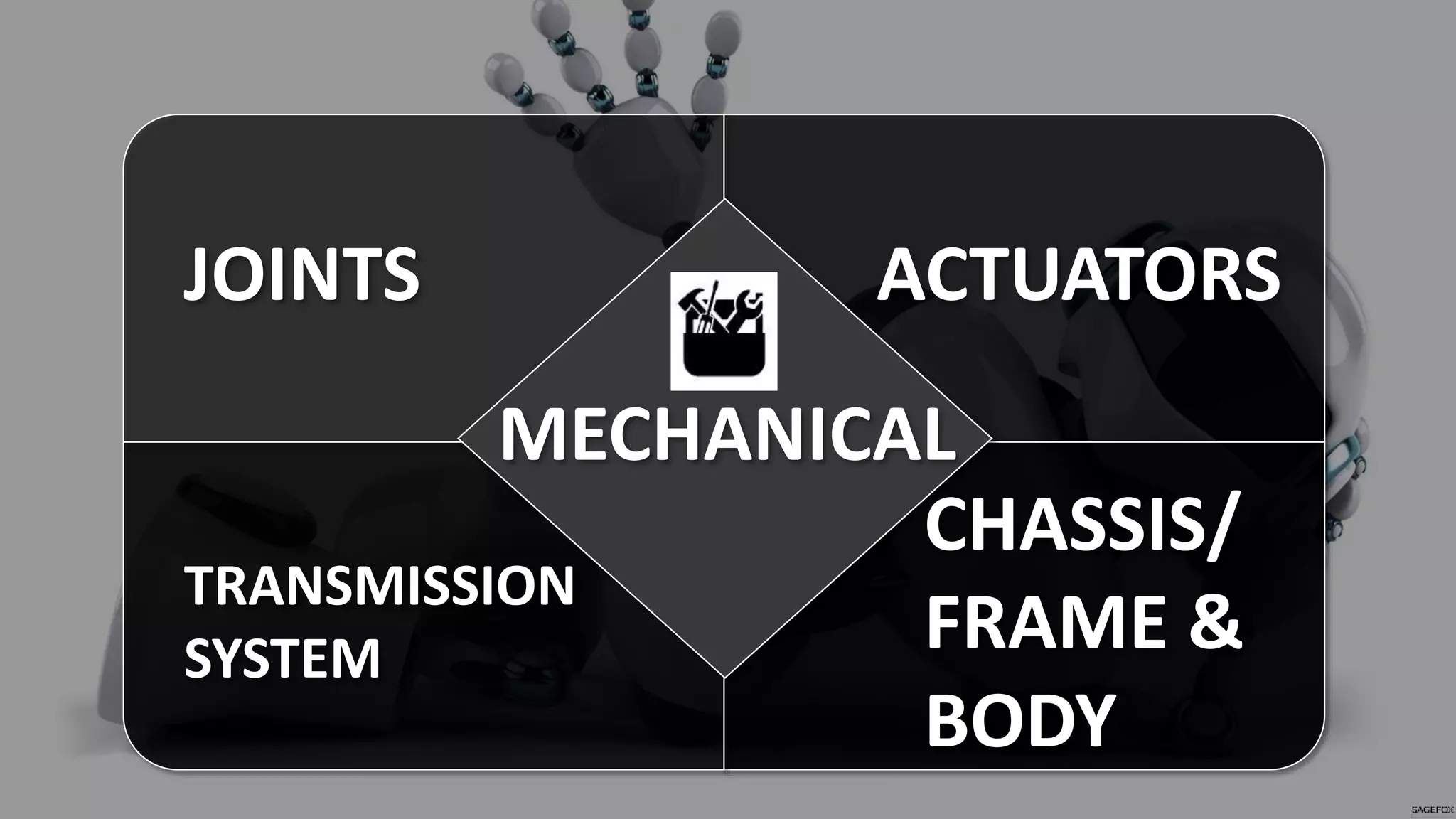
The document discusses what defines a robot and provides examples of different types of robots. It also outlines the key components that go into making a robot, including the mechanical components like chassis, joints, actuators, and transmission systems, as well as electrical and programming elements. Stationary, wheeled, legged, swimming, flying, rolling, swarm, modular, micro, nano, and soft robots are some of the robot types described.