Downloaded 12 times
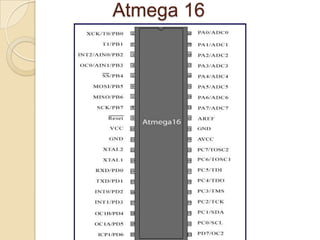

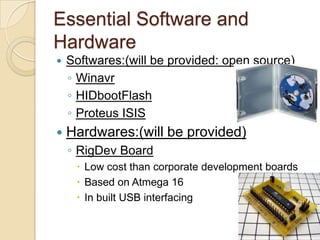
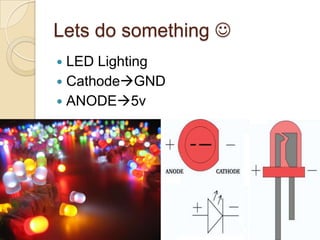
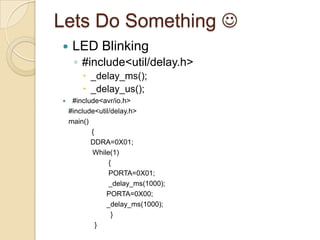
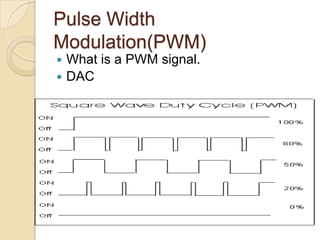
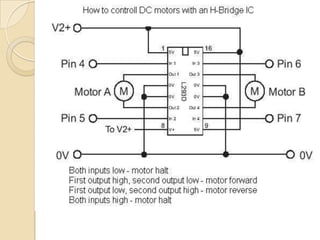
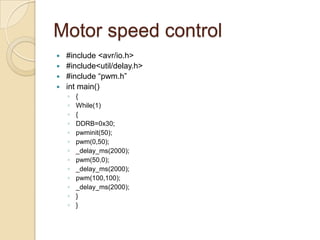

This document provides an overview of a workshop on basic robotics and embedded systems simulation. It discusses microcontrollers and some popular models like the AVR ATmega16. It describes the ATmega16's features like memory, I/O ports, timers and interfaces. It also explains concepts like I/O registers, binary-hexadecimal conversion, and using embedded C to code for the microcontroller. Examples provided include blinking an LED, pulse width modulation for LED contrast control, and motor speed control.

























































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)










