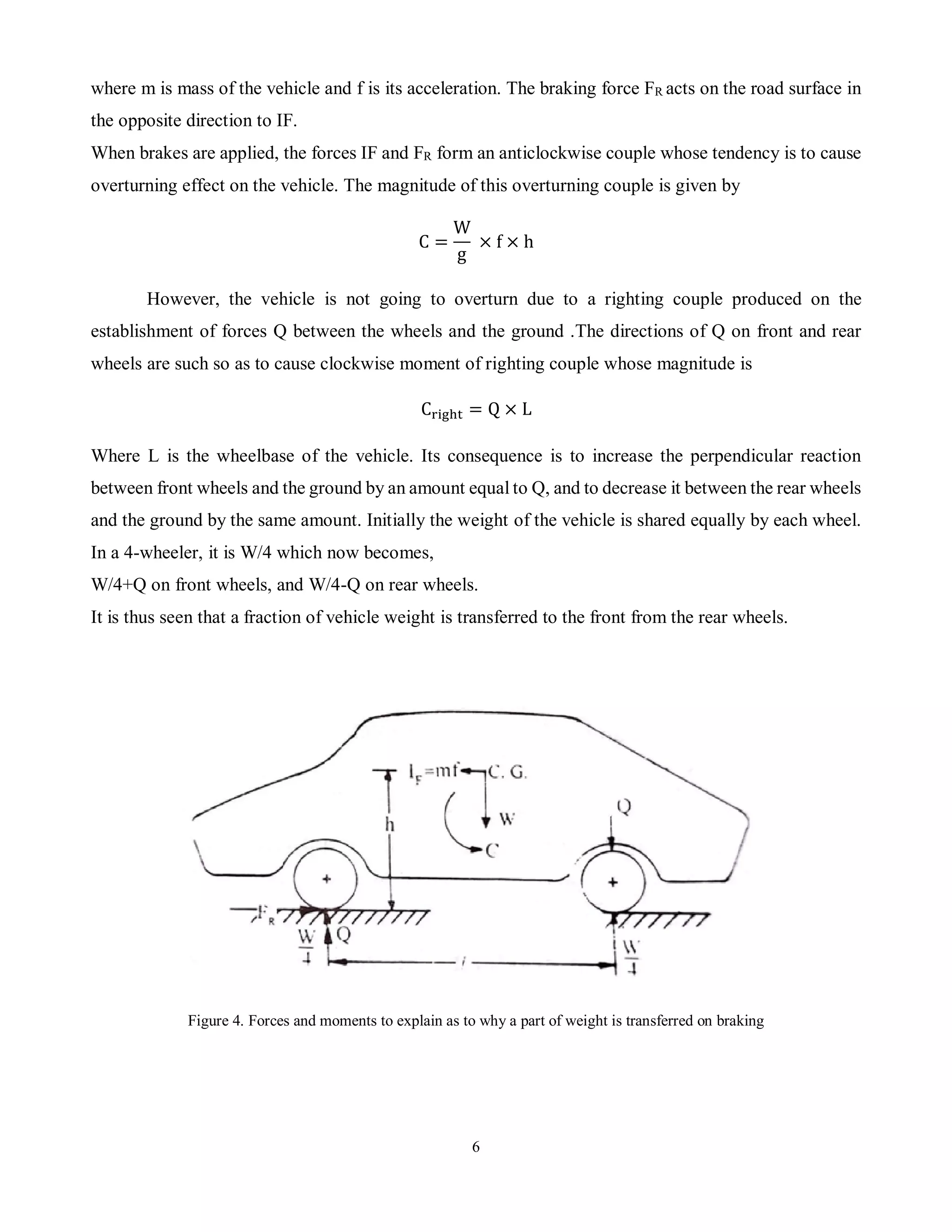
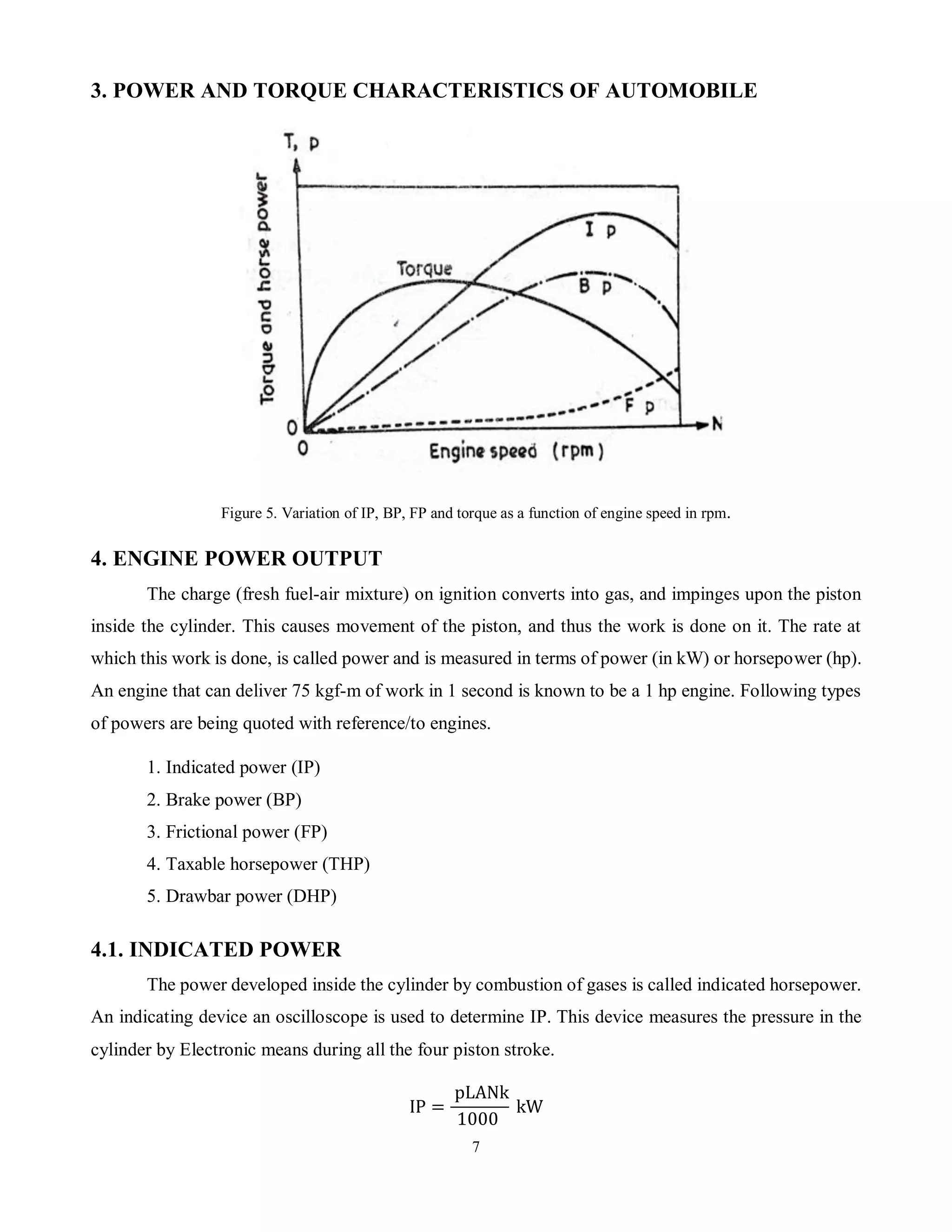
This document provides an introduction to vehicle dynamics and its key concepts. It discusses topics such as ride and handling, suspension systems, forces acting on vehicles, vehicle motion including pitch, roll and yaw, and power characteristics. Vehicle dynamics is the study of how vehicles react to driver inputs based on mechanics. Key aspects covered include body flex, weight transfer during braking, types of steering like understeer and oversteer, suspension design impacts on ride quality, and engine power outputs. The document provides a high-level overview of fundamental vehicle dynamics principles.