位置づけ
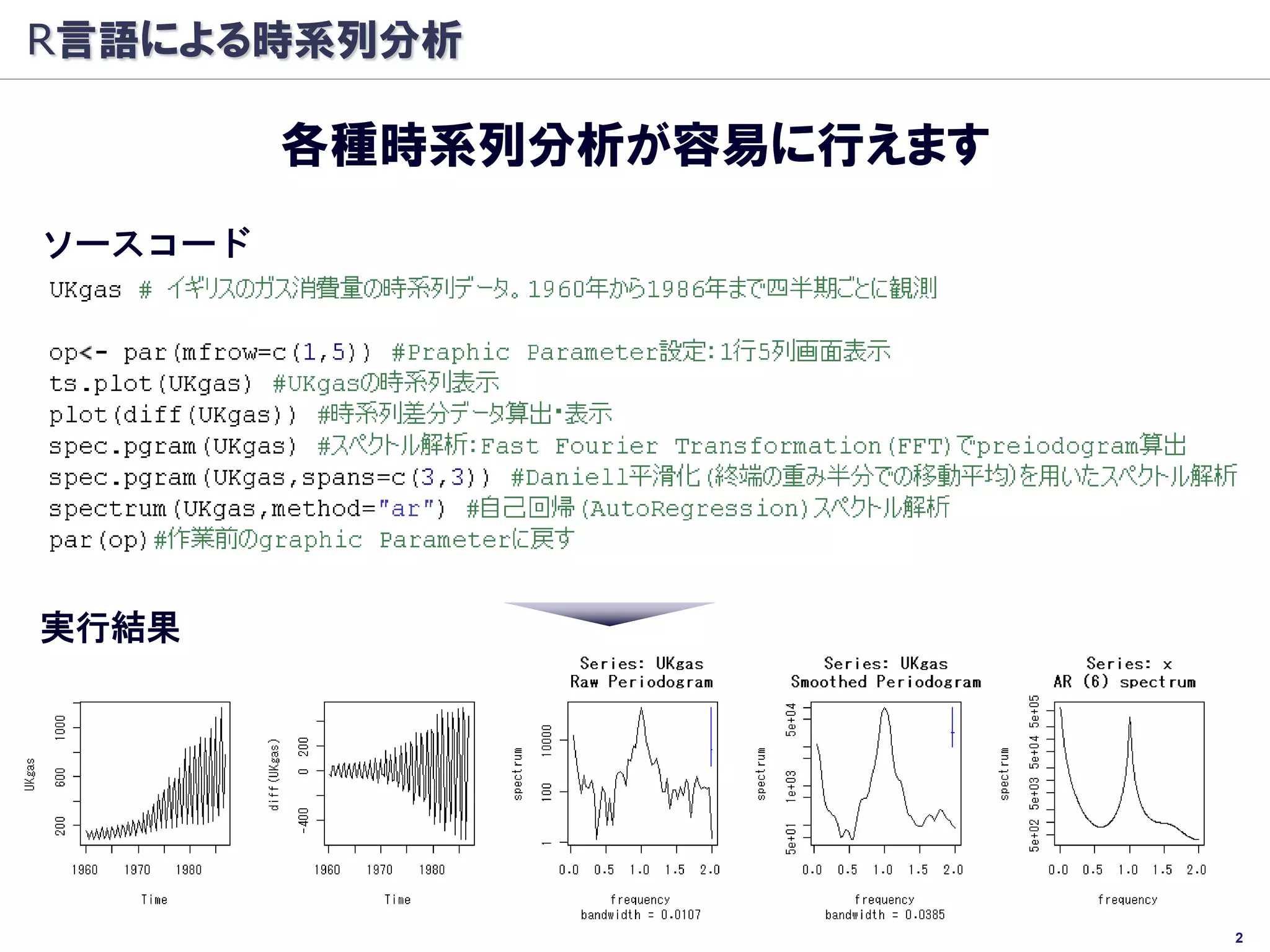
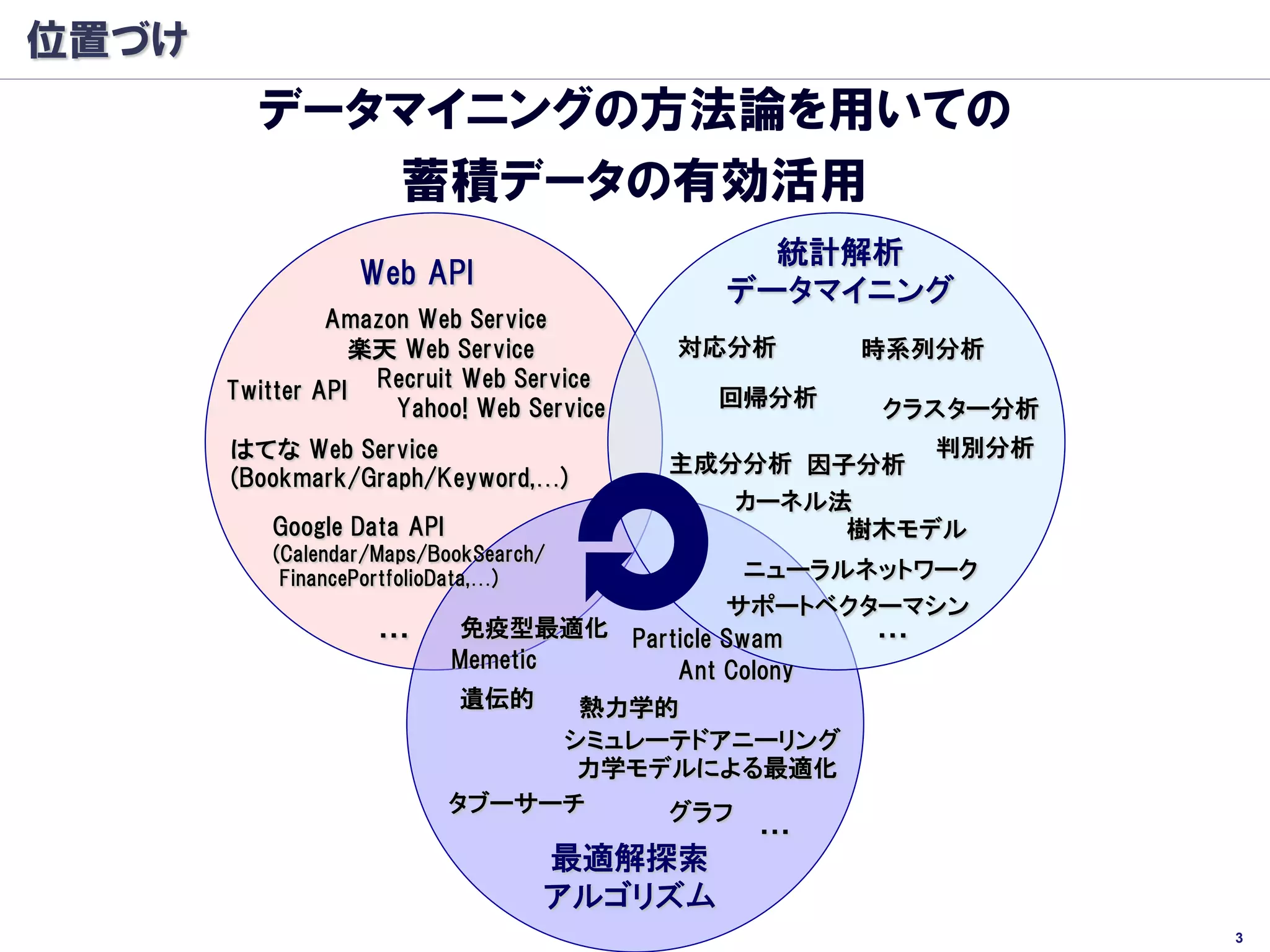
データマイニングの方法論を用いての
蓄積データの有効活用
統計解析
Web API
データマイニング
Amazon Web Service
楽天 Web Service 対応分析 時系列分析
Twitter API Recruit Web Service 回帰分析
Yahoo! Web Service クラスター分析
はてな Web Service 判別分析
主成分分析 因子分析
(Bookmark/Graph/Keyword,…)
カーネル法
Google Data API 樹木モデル
(Calendar/Maps/BookSearch/
FinancePortfolioData,…) ニューラルネットワーク
サポートベクターマシン
… 免疫型最適化 Particle Swam …
Memetic Ant Colony
遺伝的 熱力学的
シミュレーテドアニーリング
力学モデルによる最適化
タブーサーチ グラフ
…
最適解探索
アルゴリズム
3
4.
位置づけ
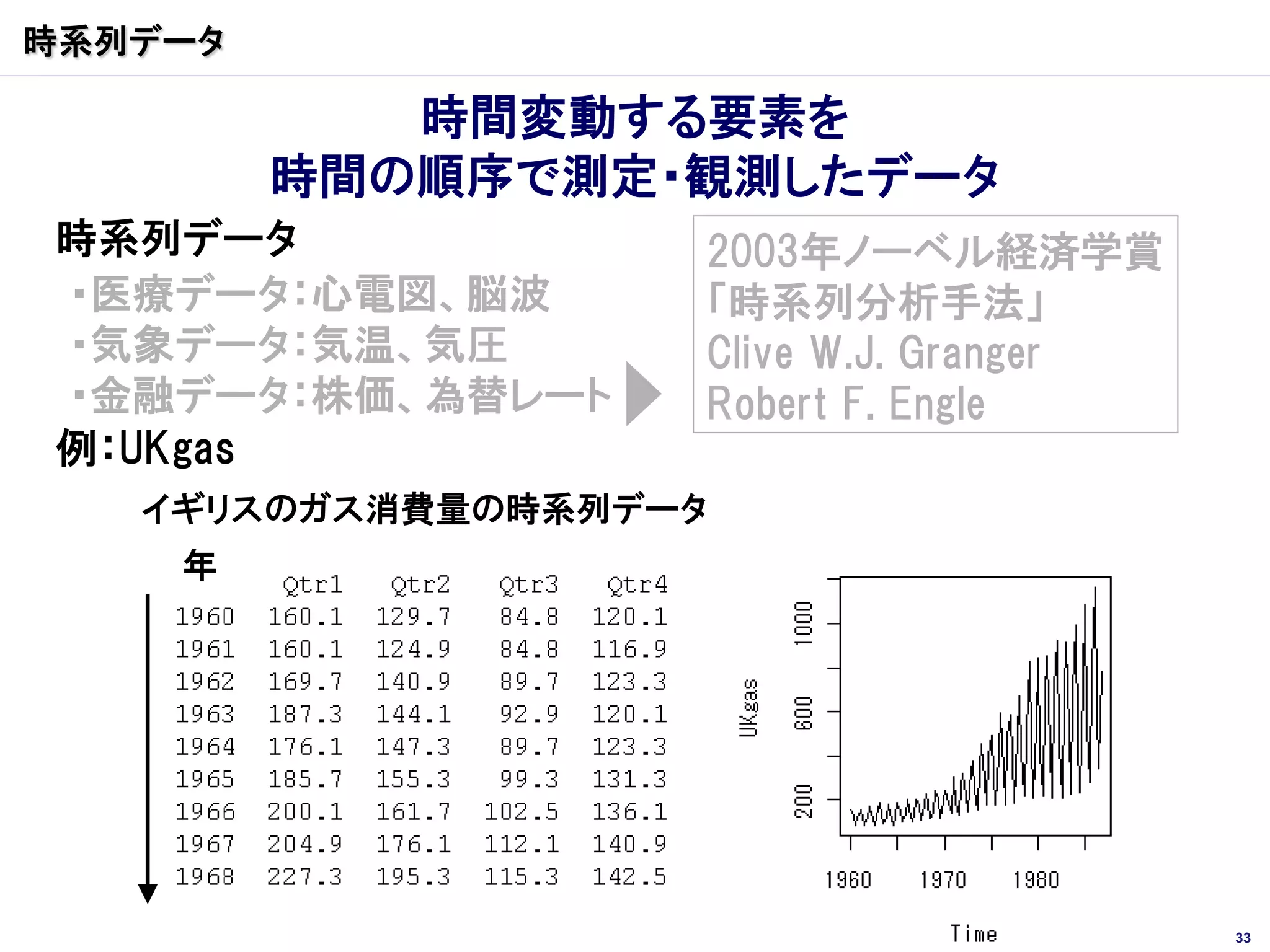
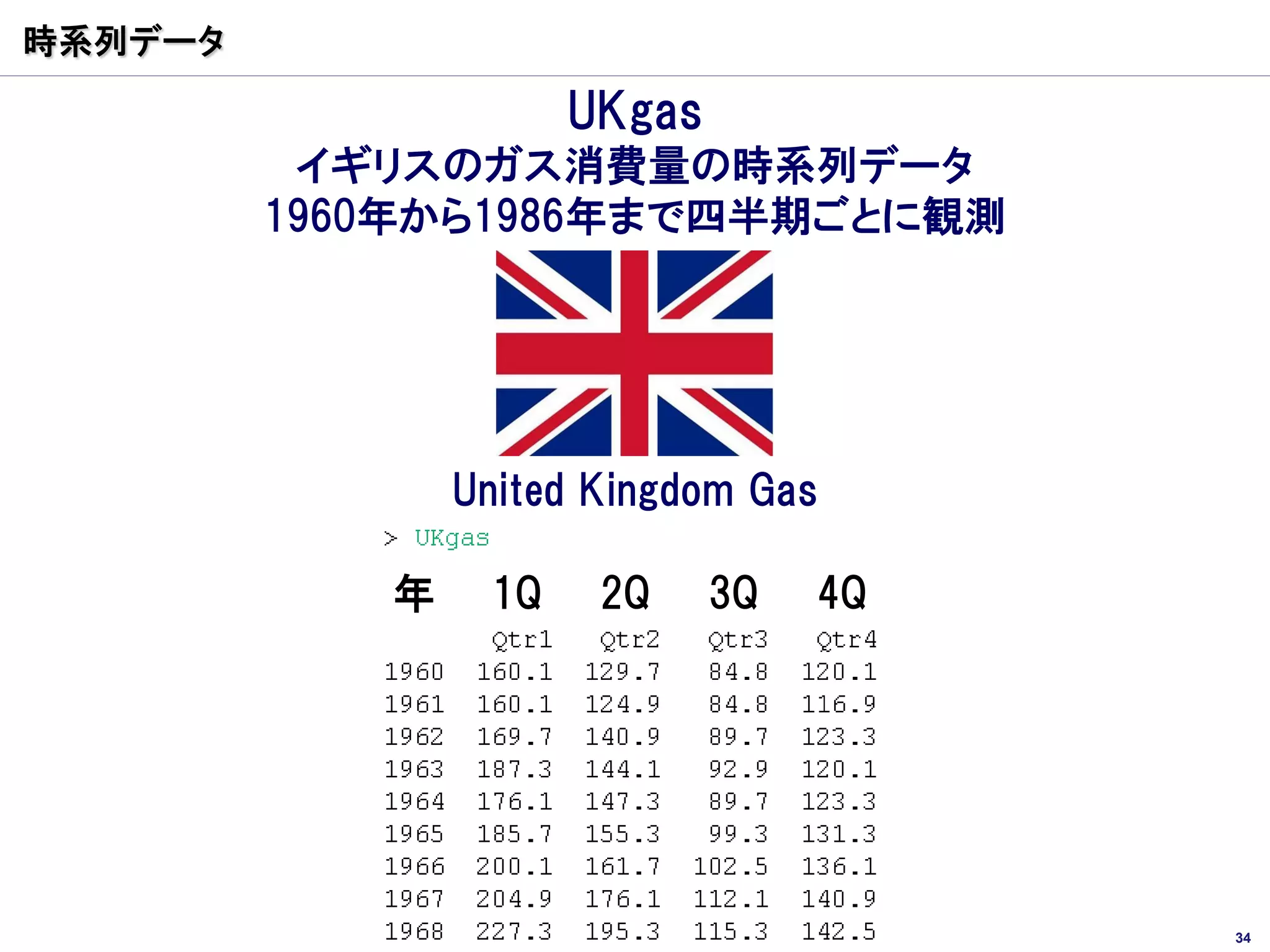
時系列分析
統計解析
Web API
データマイニング
Amazon Web Service
楽天 Web Service 対応分析 時系列分析
Twitter API Recruit Web Service 回帰分析
Yahoo! Web Service クラスター分析
はてな Web Service 判別分析
主成分分析 因子分析
(Bookmark/Graph/Keyword,…)
カーネル法
Google Data API 樹木モデル
(Calendar/Maps/BookSearch/
FinancePortfolioData,…) ニューラルネットワーク
サポートベクターマシン
… 免疫型最適化 Particle Swam …
Memetic Ant Colony
遺伝的 熱力学的
シミュレーテドアニーリング
力学モデルによる最適化
タブーサーチ グラフ
…
最適解探索
アルゴリズム
4
数理解析手法の実ビジネス適用
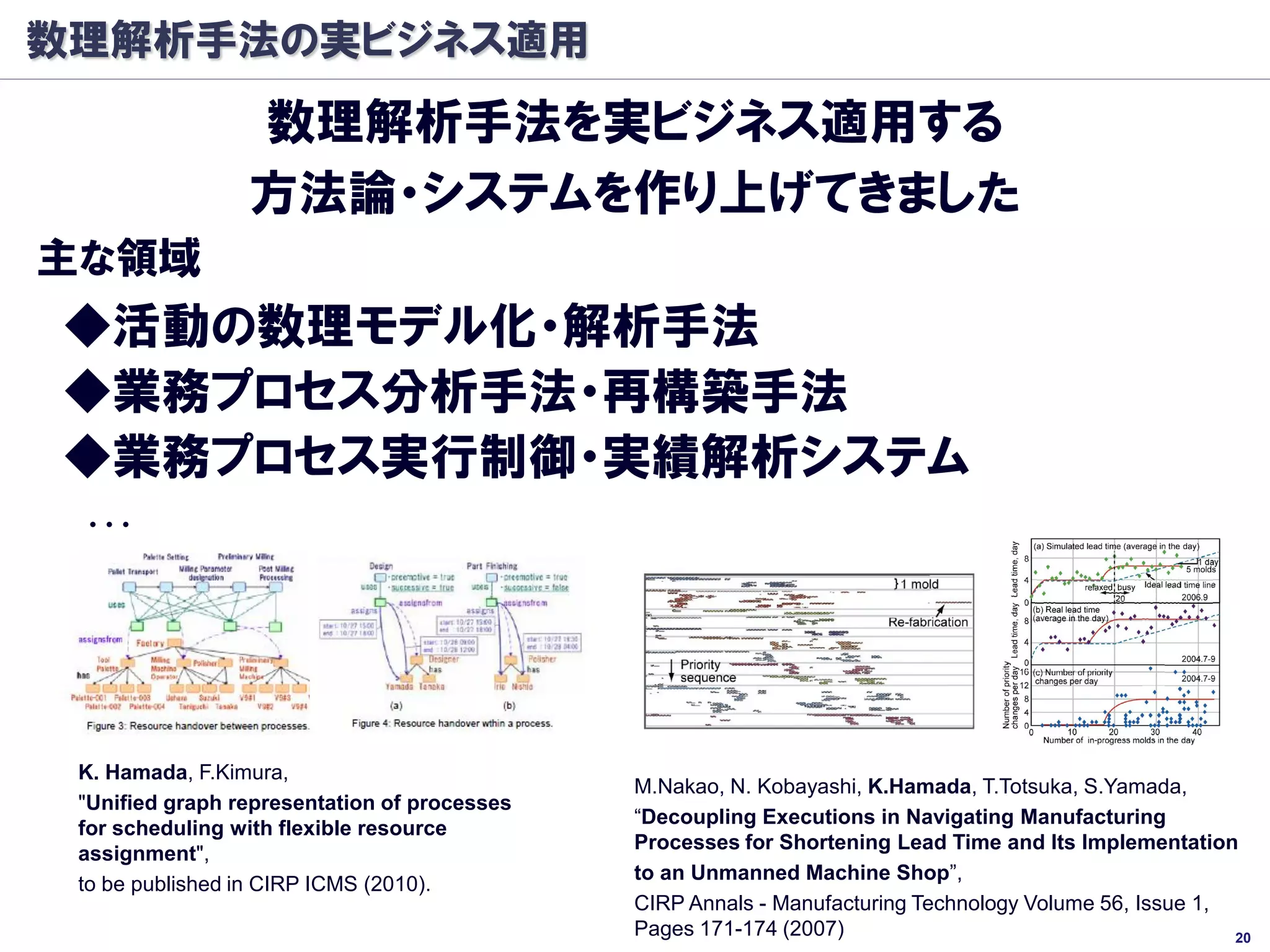
数理解析手法を実ビジネス適用する
方法論・システムを作り上げてきました
主な領域
◆活動の数理モデル化・解析手法
◆業務プロセス分析手法・再構築手法
◆業務プロセス実行制御・実績解析システム
…
K. Hamada, F.Kimura,
M.Nakao, N. Kobayashi, K.Hamada, T.Totsuka, S.Yamada,
"Unified graph representation of processes
“Decoupling Executions in Navigating Manufacturing
for scheduling with flexible resource
Processes for Shortening Lead Time and Its Implementation
assignment",
to an Unmanned Machine Shop”,
to be published in CIRP ICMS (2010).
CIRP Annals - Manufacturing Technology Volume 56, Issue 1,
Pages 171-174 (2007) 20
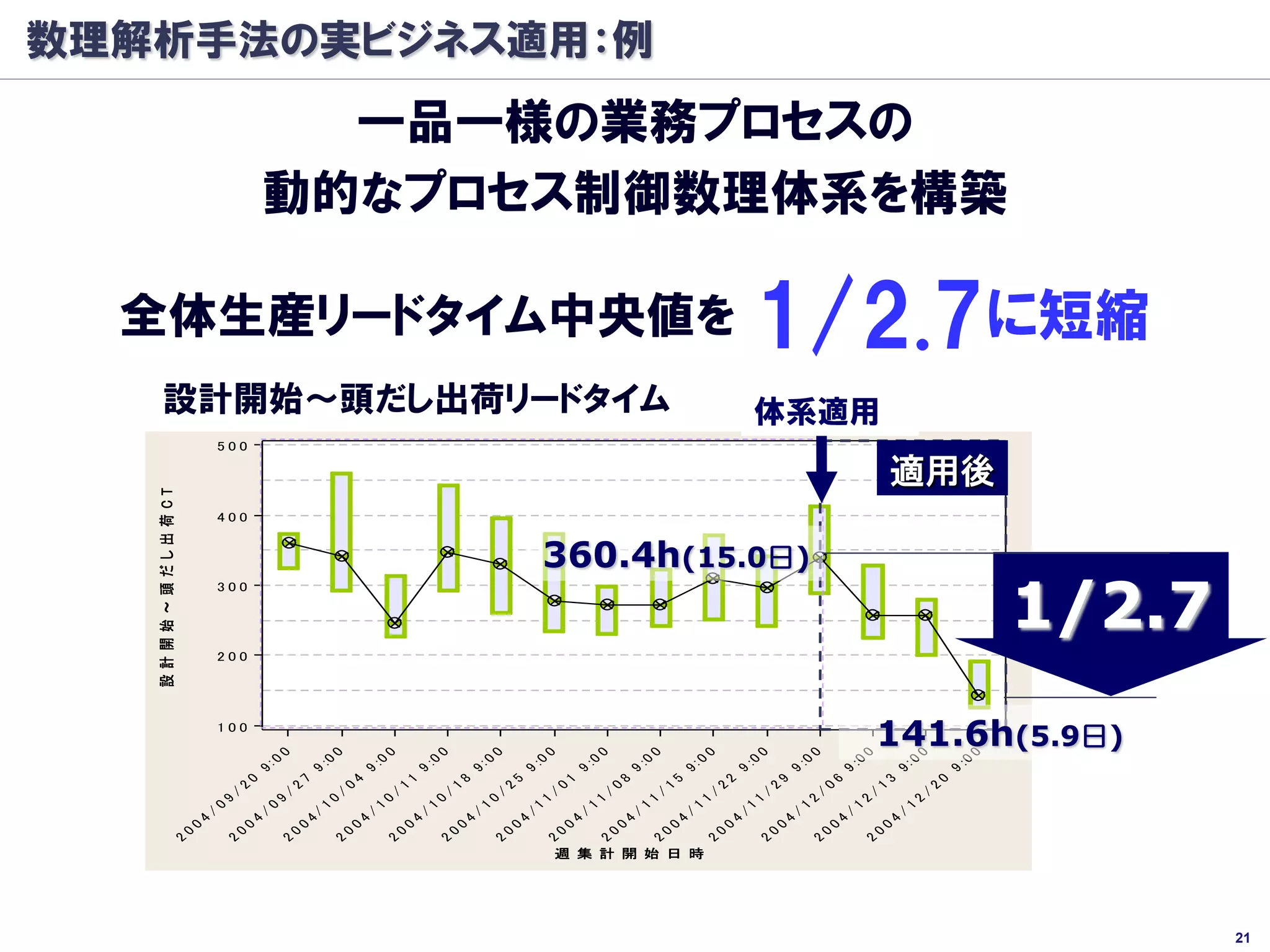
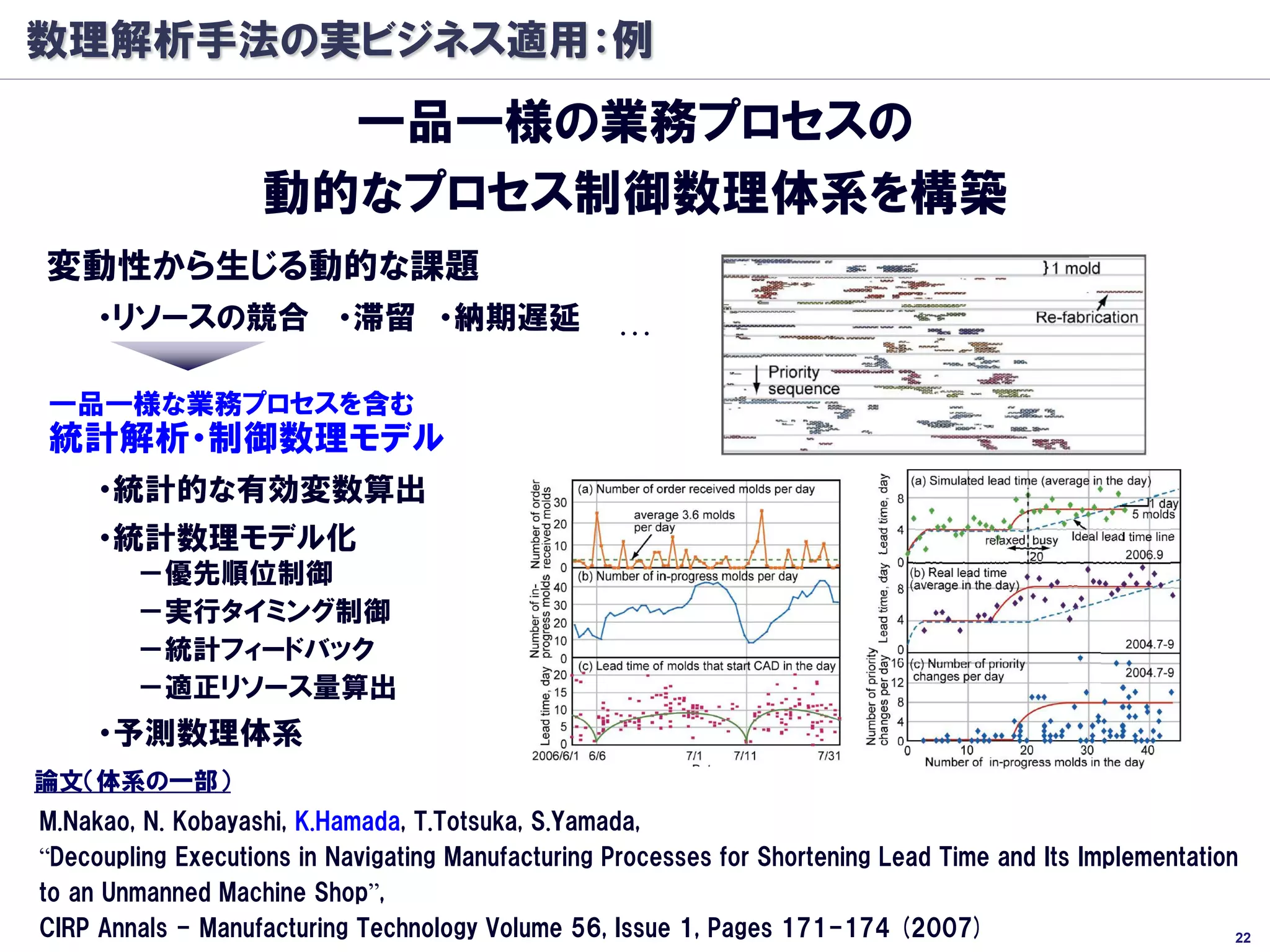
数理解析手法の実ビジネス適用:例
一品一様の業務プロセスの
動的なプロセス制御数理体系を構築
変動性から生じる動的な課題
・リソースの競合 ・滞留 ・納期遅延 …
一品一様な業務プロセスを含む
統計解析・制御数理モデル
・統計的な有効変数算出
・統計数理モデル化
-優先順位制御
-実行タイミング制御
-統計フィードバック
-適正リソース量算出
・予測数理体系
論文(体系の一部)
M.Nakao, N. Kobayashi, K.Hamada, T.Totsuka, S.Yamada,
“Decoupling Executions in Navigating Manufacturing Processes for Shortening Lead Time and Its Implementation
to an Unmanned Machine Shop”,
CIRP Annals - Manufacturing Technology Volume 56, Issue 1, Pages 171-174 (2007) 22
23.
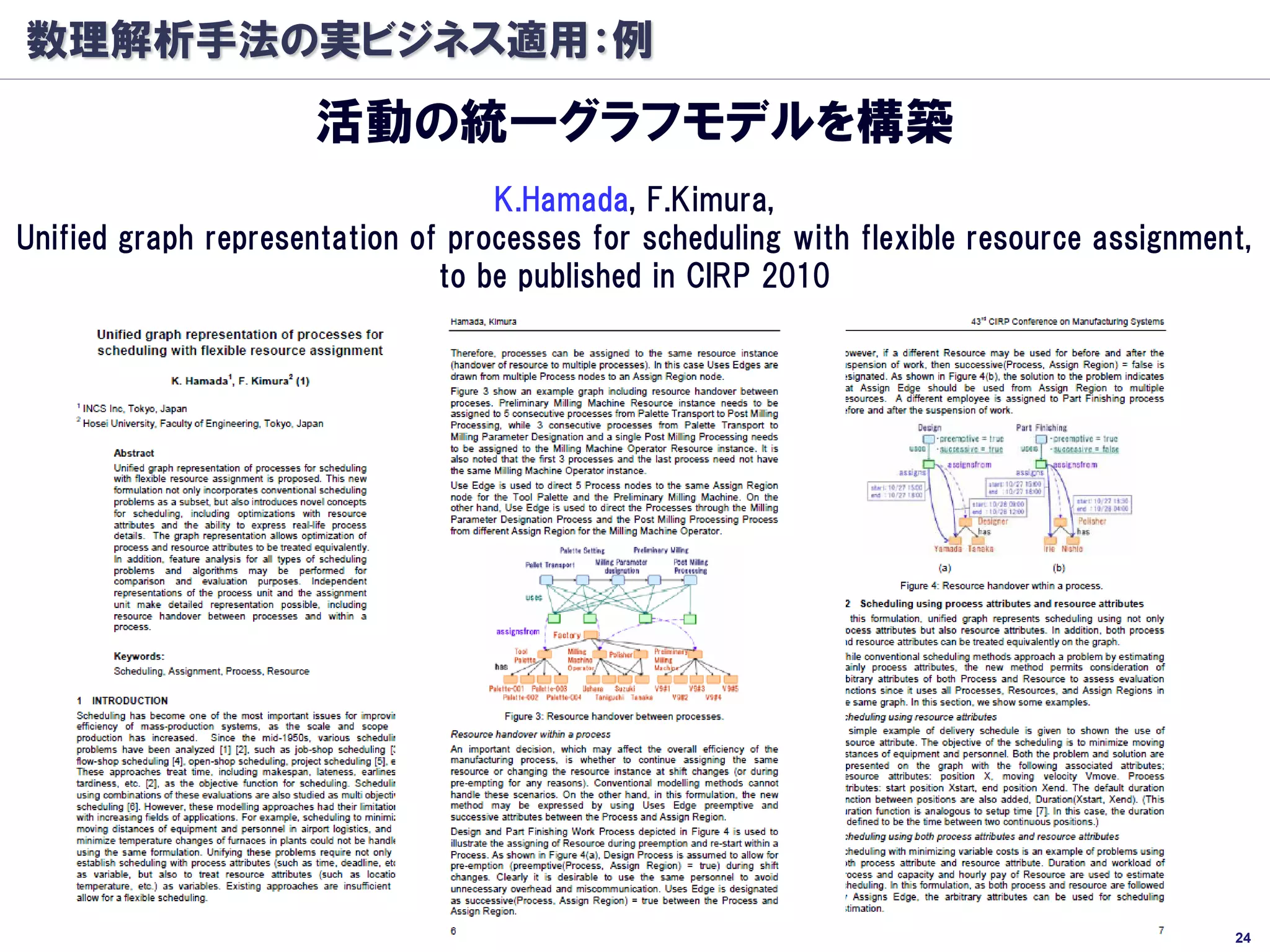
数理解析手法の実ビジネス適用:例
活動の統一グラフモデルを構築
K.Hamada, F.Kimura,
Unified graph representation of processes for scheduling with flexible resource assignment,
to be published in CIRP 2010
青字:割付モデル属性
[ ] : Optional
Node ・priority(優先度) Edge
・duration(予定時間)
[・earliest(再早開始日時) ] Process Edge
Process [・deadline(納期) ]
[・or(条件集約数) ]
前プロセスの終了後に後プロセスが
プロセスを表す 開始できること表す
・attributes(属性)
preemptable(中断可否),
successive(引継ぎ可否)
Uses Edge
workload(作業負荷) Processが使用する
uses uses uses uses uses uses Assign Region を表す
Assign Region Assigns from Edge
同一Resourceを割付け続ける Assign Regionに
assigns from assigns from 指定Resourceの子Resource集合の
範囲を表す
assigns assigns 中から割付けることを示す
工場01 [process]
has has [startDate(開始日時)]
[endDate(終了日時)] Assigns Edge
型01 仕上WG StartDateからEndDateまでの間
Resource has Assign RegionにResourceを
割付対象要素を表す has has has has has has 割付けることを表す
・capacity(容量)
・calender(カレンダー)
CAVI01 CORE01 … 山田さん 田中さん 鈴木さん ・attributes(属性) Has Edge
東さん Resourceの所有関係を表す
23
24.
数理解析手法の実ビジネス適用:例
活動の統一グラフモデルを構築
K.Hamada, F.Kimura,
Unified graph representation of processes for scheduling with flexible resource assignment,
to be published in CIRP 2010
24
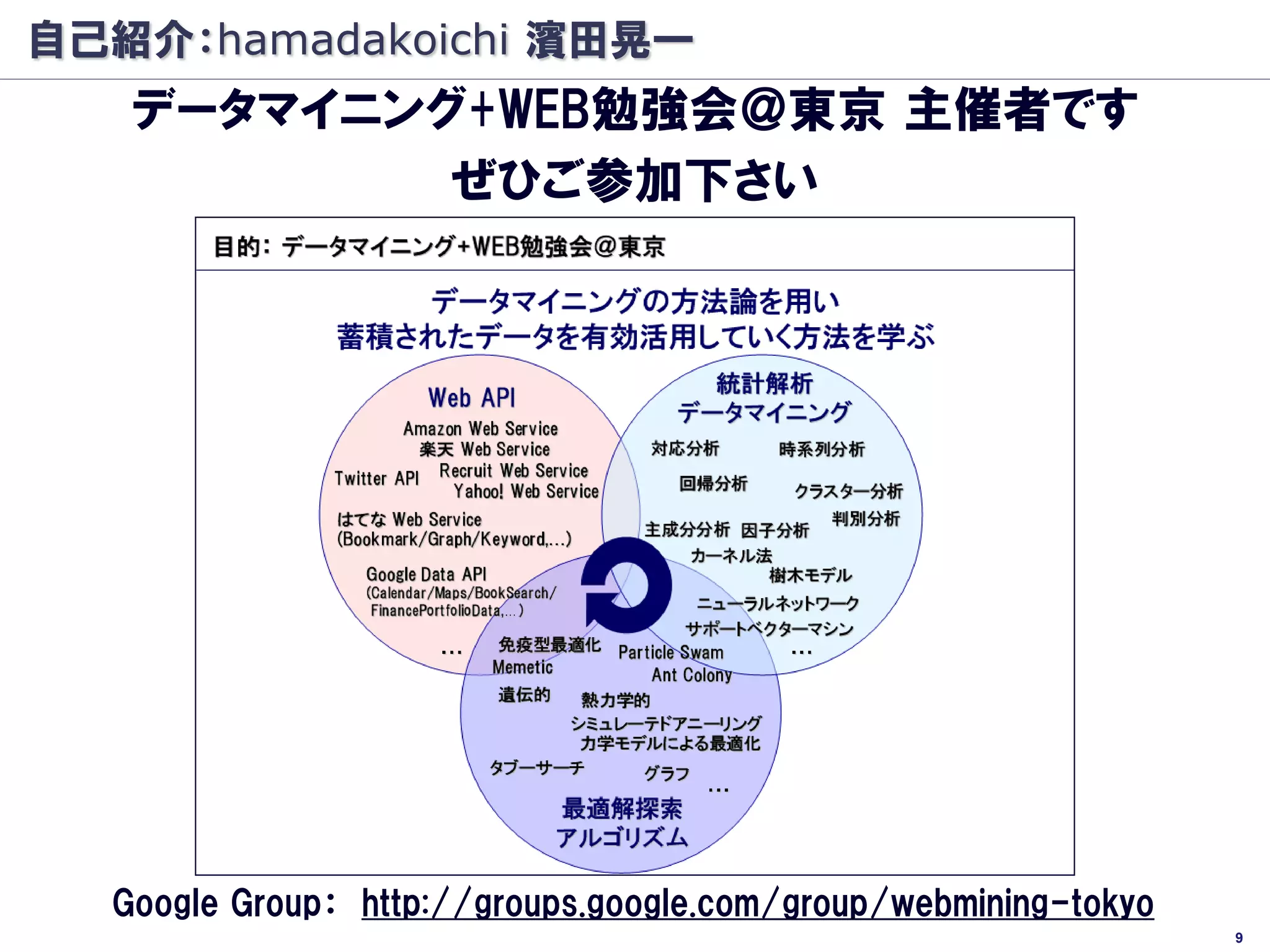
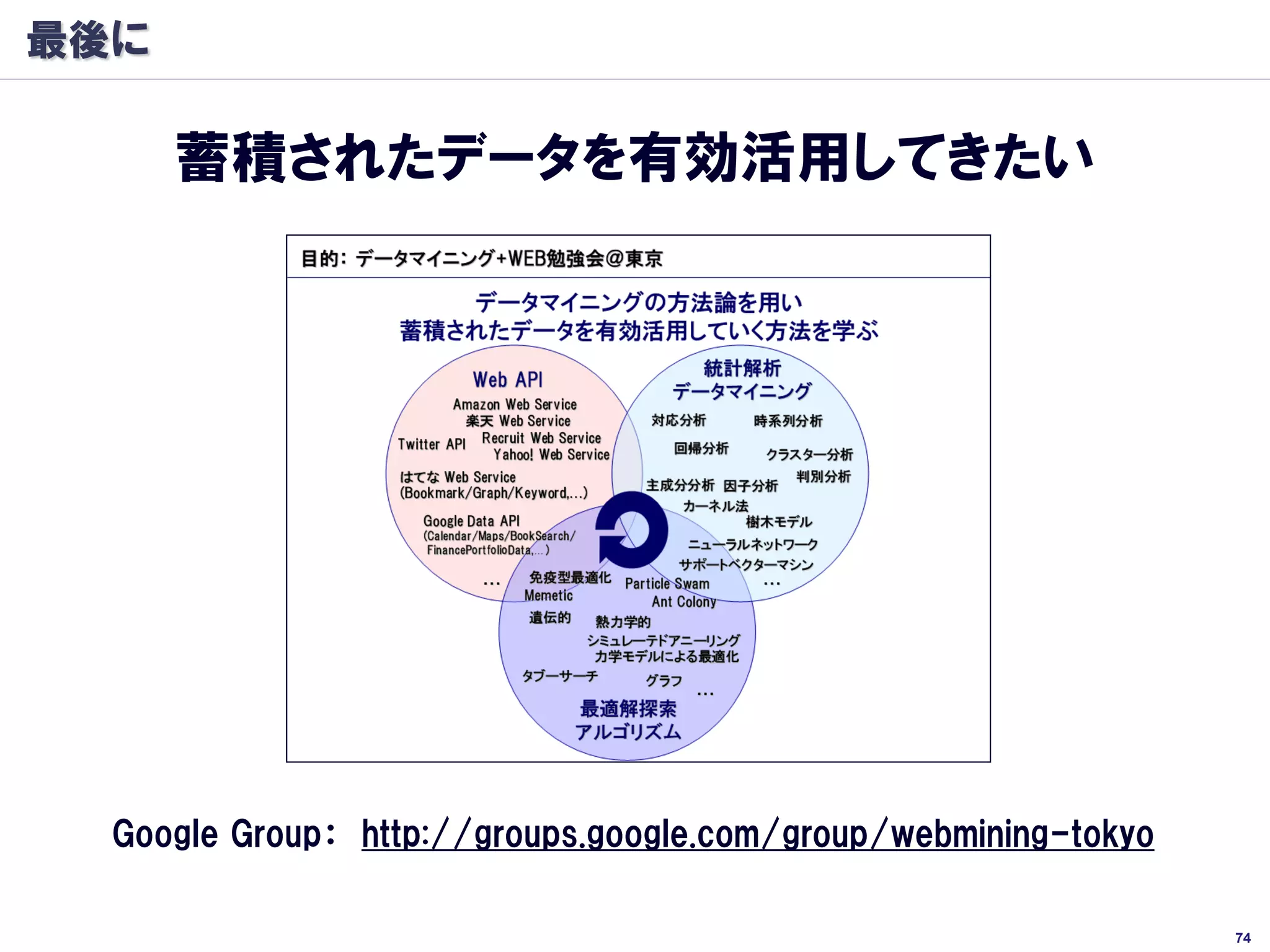
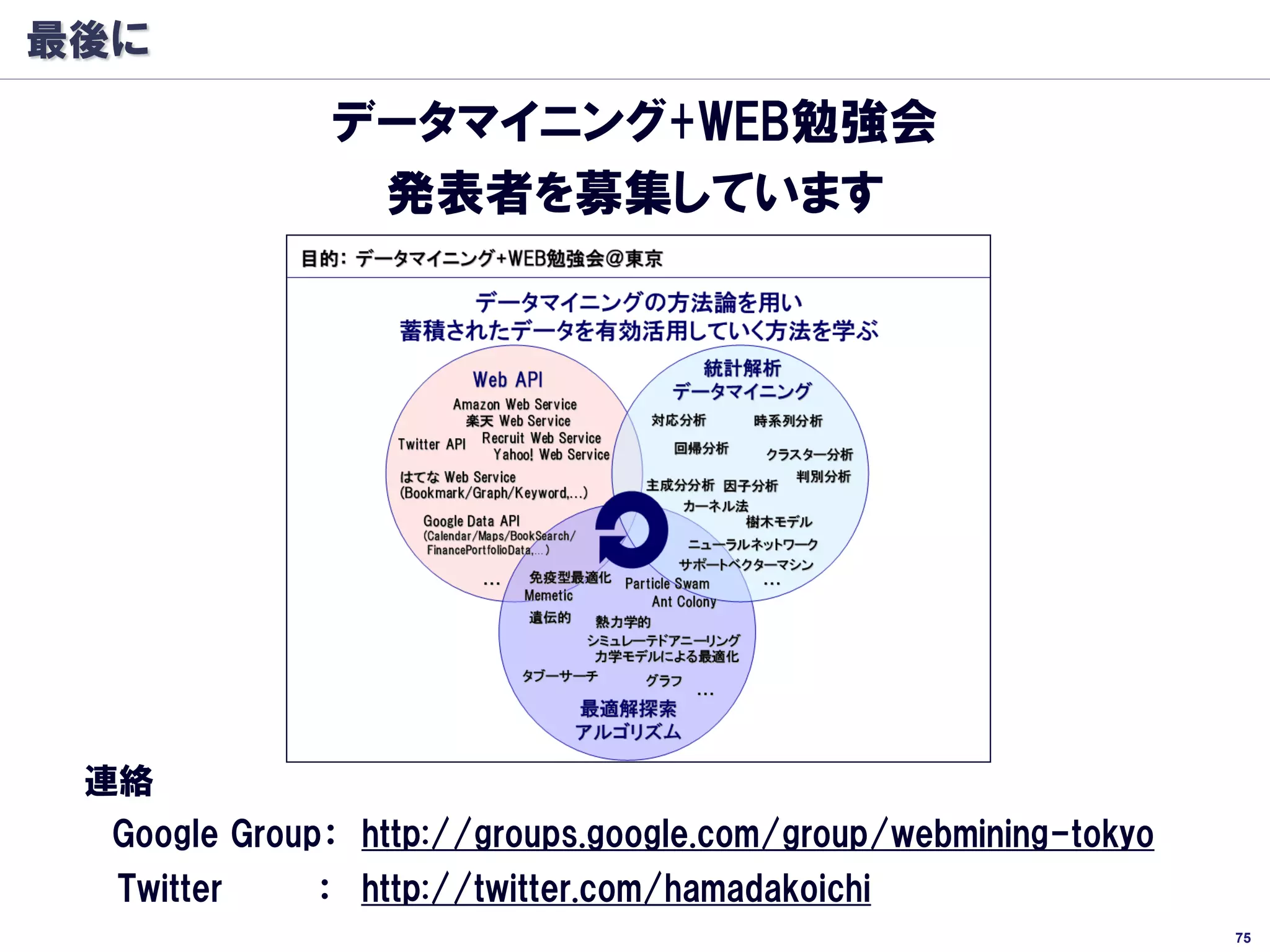
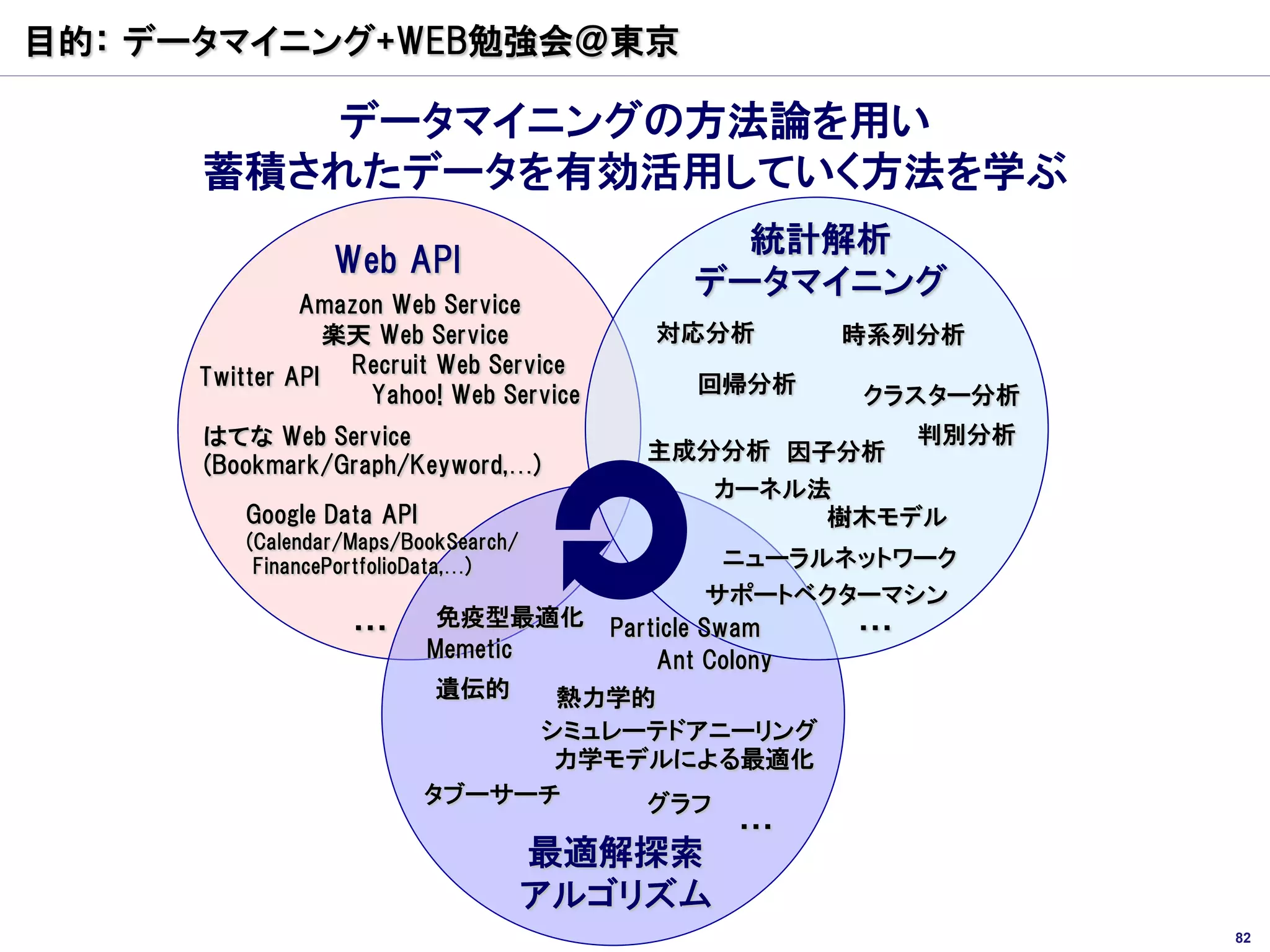
目的: データマイニング+WEB勉強会@東京
データマイニングの方法論を用い
蓄積されたデータを有効活用していく方法を学ぶ
統計解析
Web API
データマイニング
Amazon Web Service
楽天 Web Service 対応分析 時系列分析
Twitter API Recruit Web Service 回帰分析
Yahoo! Web Service クラスター分析
はてな Web Service 判別分析
主成分分析 因子分析
(Bookmark/Graph/Keyword,…)
カーネル法
Google Data API 樹木モデル
(Calendar/Maps/BookSearch/
FinancePortfolioData,…) ニューラルネットワーク
サポートベクターマシン
… 免疫型最適化 Particle Swam …
Memetic Ant Colony
遺伝的 熱力学的
シミュレーテドアニーリング
力学モデルによる最適化
タブーサーチ グラフ
…
最適解探索
アルゴリズム
82

![数理解析手法の実ビジネス適用:例
活動の統一グラフモデルを構築
K.Hamada, F.Kimura,
Unified graph representation of processes for scheduling with flexible resource assignment,
to be published in CIRP 2010
青字:割付モデル属性
[ ] : Optional
Node ・priority(優先度) Edge
・duration(予定時間)
[・earliest(再早開始日時) ] Process Edge
Process [・deadline(納期) ]
[・or(条件集約数) ]
前プロセスの終了後に後プロセスが
プロセスを表す 開始できること表す
・attributes(属性)
preemptable(中断可否),
successive(引継ぎ可否)
Uses Edge
workload(作業負荷) Processが使用する
uses uses uses uses uses uses Assign Region を表す
Assign Region Assigns from Edge
同一Resourceを割付け続ける Assign Regionに
assigns from assigns from 指定Resourceの子Resource集合の
範囲を表す
assigns assigns 中から割付けることを示す
工場01 [process]
has has [startDate(開始日時)]
[endDate(終了日時)] Assigns Edge
型01 仕上WG StartDateからEndDateまでの間
Resource has Assign RegionにResourceを
割付対象要素を表す has has has has has has 割付けることを表す
・capacity(容量)
・calender(カレンダー)
CAVI01 CORE01 … 山田さん 田中さん 鈴木さん ・attributes(属性) Has Edge
東さん Resourceの所有関係を表す
23](https://image.slidesharecdn.com/r-100423232629-phpapp01/75/R-23-2048.jpg)


















![[DL輪読会]逆強化学習とGANs](https://cdn.slidesharecdn.com/ss_thumbnails/irlgans-171128063119-thumbnail.jpg?width=640&height=640&fit=bounds)












![[DL輪読会]Learning Latent Dynamics for Planning from Pixels](https://cdn.slidesharecdn.com/ss_thumbnails/taniguchi20181221-190104064850-thumbnail.jpg?width=640&height=640&fit=bounds)







![[データマイニング+WEB勉強会][R勉強会] R言語によるクラスター分析 - 活用編](https://cdn.slidesharecdn.com/ss_thumbnails/cluster-100416230155-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)


![[データマイニング+WEB勉強会][R勉強会] 創設の思い・目的・進行方針](https://cdn.slidesharecdn.com/ss_thumbnails/opeining-100416225629-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
![[データマイニング+WEB勉強会][R勉強会] はじめてでもわかる R言語によるクラスター分析 - 似ているものをグループ化する-](https://cdn.slidesharecdn.com/ss_thumbnails/webmining2cluster-100319212743-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)


































