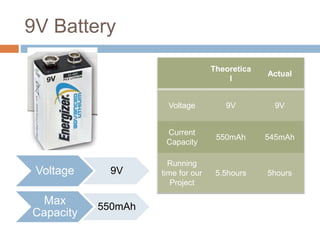
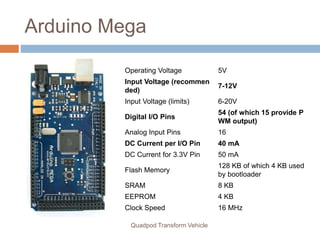
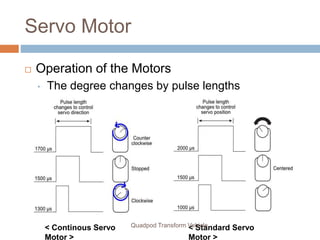
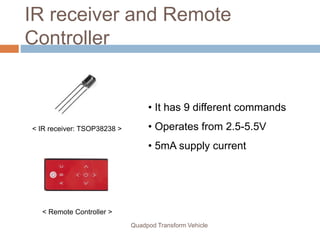
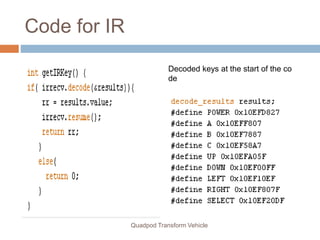
The document describes a transformable vehicle that can operate in both a two-wheeled vehicle mode and a four-legged quadpod mode. It uses an Arduino Mega microcontroller, 9V battery, four servo motors, and an IR receiver controlled by a remote to switch between modes. The vehicle is designed to navigate unpaved and bumpy terrain by transforming into the quadpod configuration when obstacles are detected.