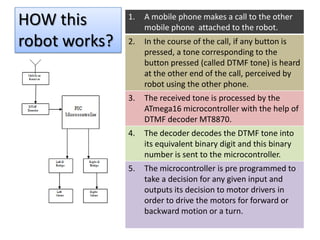
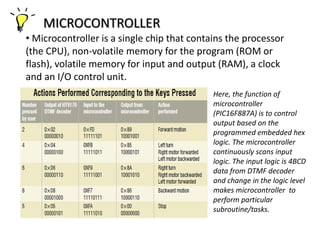
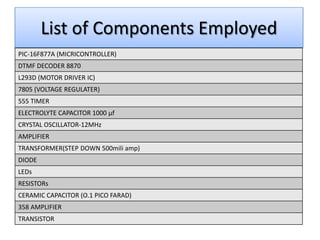
This project involves building a land rover that can be controlled via phone calls. The rover uses a DTMF decoder chip to interpret tones from key presses on the calling phone and direct motors accordingly via a microcontroller. It has potential applications in agriculture, military, and security. The technical aspects include components like a PIC microcontroller, motor driver, and circuit diagram. There is scope to improve and configure additional controls for specific purposes.