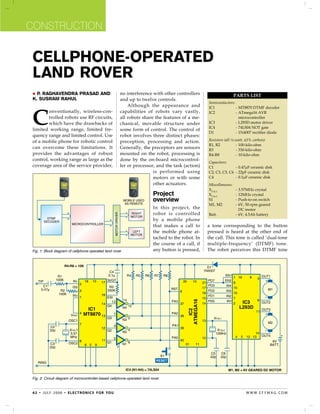
This document describes the construction of a cellphone-operated land rover robot. The robot uses a mobile phone to receive DTMF tones which are decoded by a microcontroller to determine motor movements. Key components include a DTMF decoder, microcontroller, and motor driver. Pressing buttons on the calling phone generates tones that are received and used to control the robot's forward, backward, left and right movements as well as stopping. The design allows robust remote control over large areas using existing mobile networks.