Downloaded 162 times
![INTRODUCTIONRadio control (often abbreviated to R/C or simply RC) is the use of radio signals to remotely control a device. The term is used frequently to refer to the control of model vehicles from a hand-held radio transmitter. Industrial, military, and scientific research organizations make [traffic] use of radio-controlled vehicles as well. A remote control vehicle is defined as any mobile device that is controlled by a means that does not restrict its motion with an origin external to the device. This is often a radio control device, cable between control and vehicle, or an infrared controller. A remote control vehicle (Also called as RCV) differs from a robot in that the RCV is always controlled by a human and takes no positive action autonomously.](https://image.slidesharecdn.com/cellphoneoperatedrobot-090508035359-phpapp02-100824012409-phpapp01/85/Cellphoneoperatedrobot-090508035359-phpapp02-2-320.jpg)

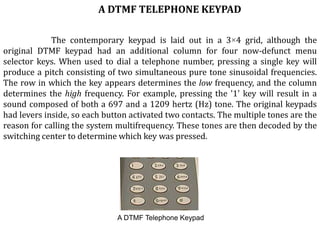













This project report summarizes a student project to build a cell phone operated robot using dual-tone multi-frequency (DTMF) technology. The robot is designed to be remotely controlled by phone calls and can be used for applications in scientific research, military, search and rescue, and recreation. The report describes the technology used, including DTMF signaling and keypad frequencies. It also provides block diagrams, circuit diagrams, and discusses the software and programming tools used. Suggestions are made for further improvements including adding sensors, password protection, and using the robot to call and report alarm notifications.