Downloaded 214 times

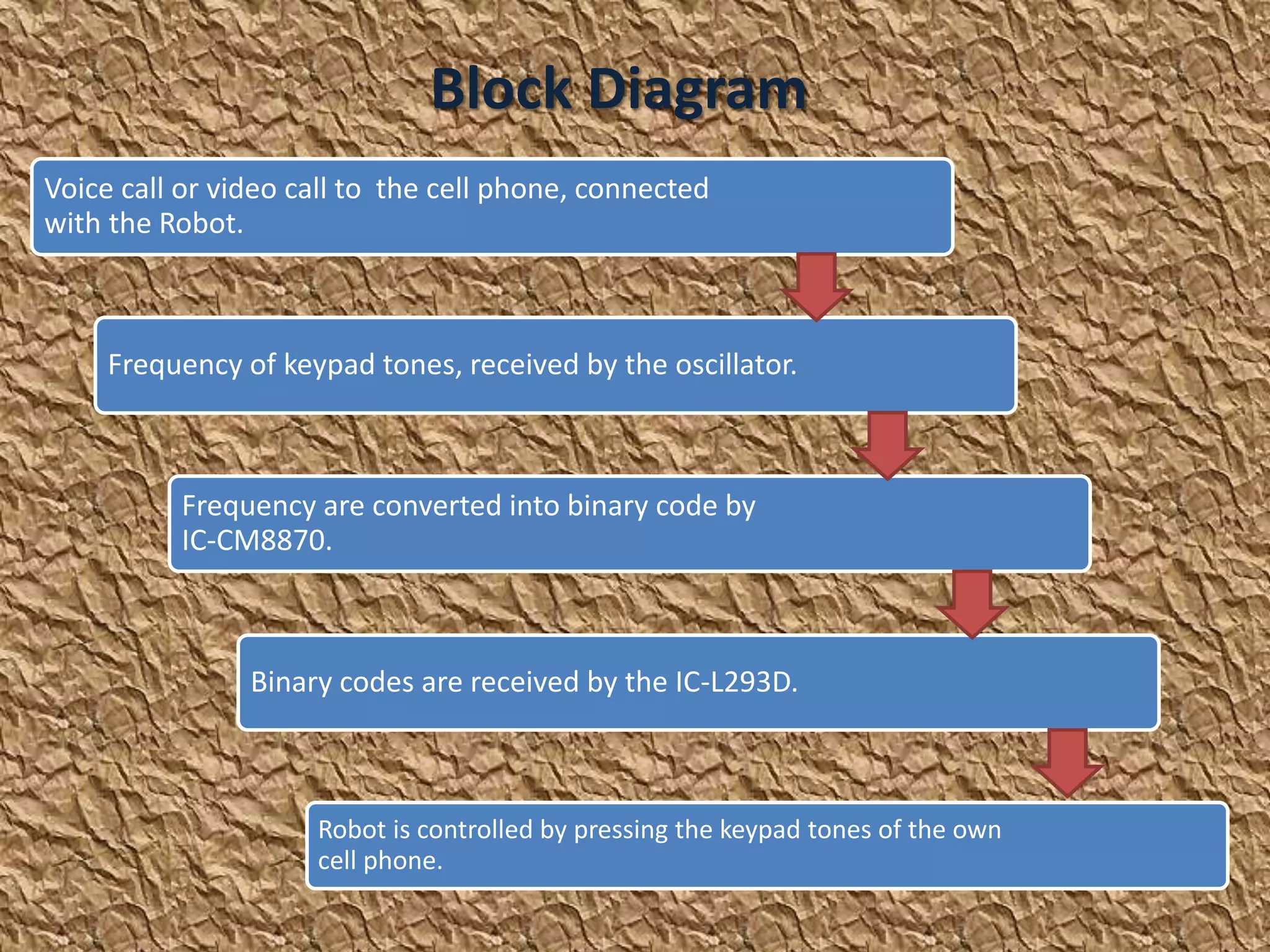
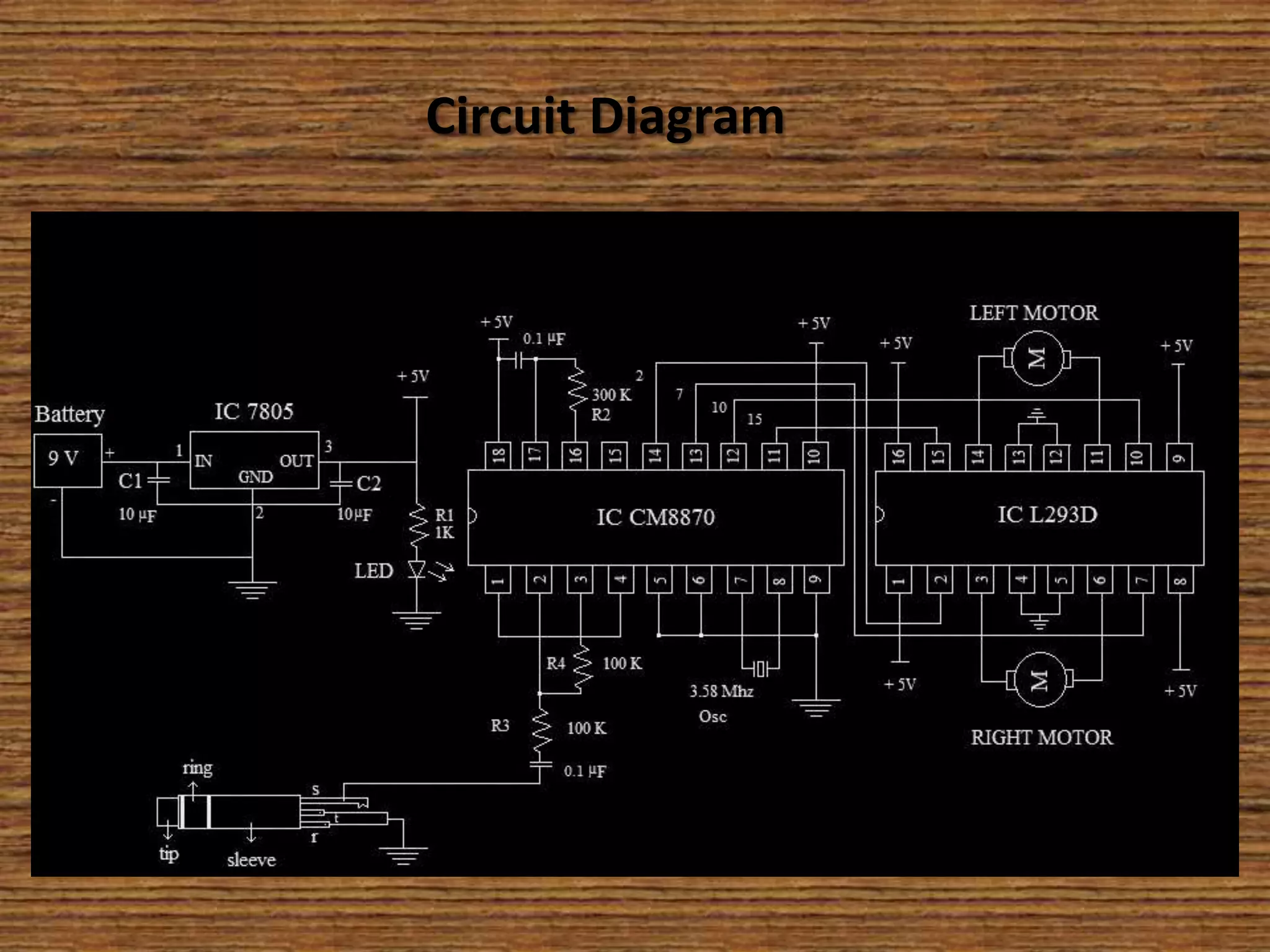
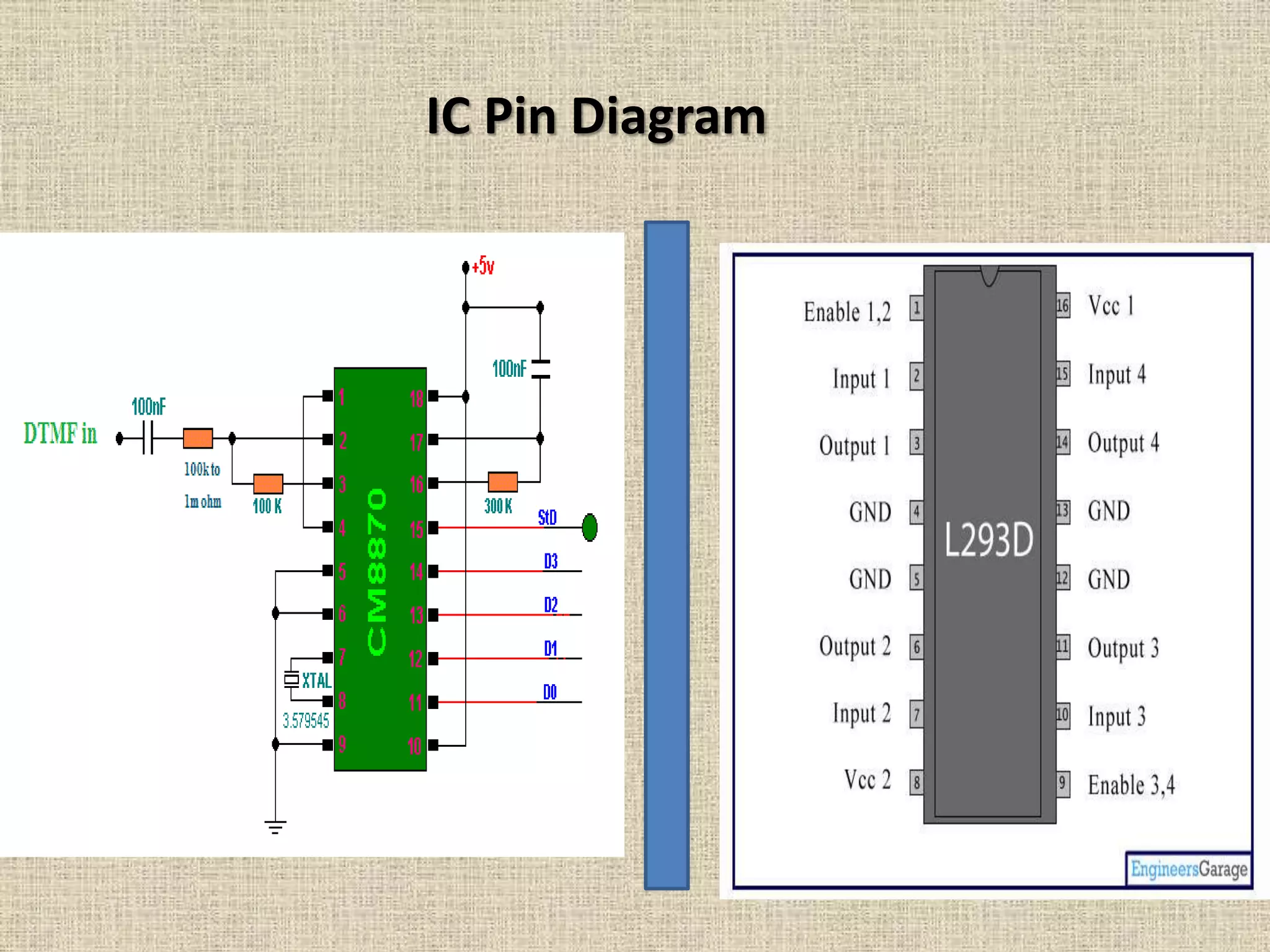

The document details a project on a GSM-based mobile control robot that utilizes phone calls to manipulate the robot via keypad tones, offering advantages like faster operation and a wider range compared to RF-controlled robots. It can serve multiple functions such as rescue missions and surveillance, with the potential for future enhancements including various sensors and a robotic arm. The project outlines the circuit components and suggests further developments to increase its utility.


















































































