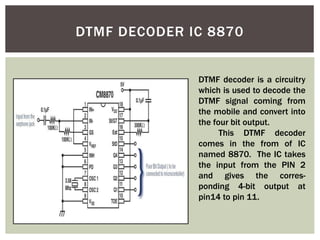
This document describes a project to remotely control a land rover vehicle using DTMF tones generated from a mobile phone. DTMF signals from the phone are decoded using an 8870 IC and sent to an AT89S52 microcontroller. The microcontroller then controls an L293D motor driver and four motors on the rover to move it forward, backward, left and right. Potential applications include remote control vehicles for scientific, military, and search and rescue purposes. Further improvements could involve adding sensors to detect obstacles and a camera for beyond line-of-sight control.