Poster image processing
•
0 likes•548 views

This document describes image processing methods to analyze bubble characteristics from images. It presents algorithms for preprocessing images, measuring penetration depth and departure frequency, segmenting individual bubbles, and detecting bubble regions. The goals are to extract physical bubble information like velocity and trajectory by detecting bubble position across images and focusing on a single bubble of interest using image inpainting after segmentation. Future work involves algorithms for bubble ellipse reconstruction and flow regime classification.

More Related Content
What's hot
What's hot (20)
Similar to Poster image processing
Similar to Poster image processing (20)
Recently uploaded
Recently uploaded (20)
Poster image processing
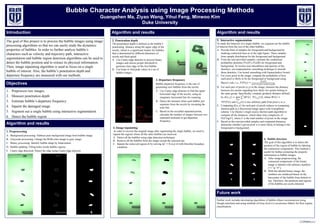
- 1. Bubble Character Analysis using Image Processing Methods Guangshen Ma, Ziyao Wang, Yihui Feng, Minwoo Kim Duke University Introduction The goal of this project is to process the bubble images using image processing algorithms so that we can easily study the dynamics properties of bubbles. In order to further analyze bubble’s characters such as velocity and trajectory path, interactive segmentation and bubble region detection algorithms can be used to detect the bubble position and to extract its physical information. Then, image inpainting algorithm is used to focus on a single bubble of interest. Also, the bubble’s penetration depth and departure frequency are measured with our methods. 1. Preprocess raw images 2. Measure penetration depth 3. Estimate bubble’s departure frequency 4. Inpaint the damaged image 5. Segment out a single bubble using interactive segmentation 6. Detect the bubble region Algorithm and results 1. Preprocessing A. Background processing: Subtract pure background image from bubble image. B. Grayscale processing: Change the RGB color image to gray image. C. Binary processing: Identify bubble shape by binarization. D. Bubble padding: Filling holes inside bubble regions. E. Canny edge detection: Detect the edge using Canny-edge detector. Algorithm and results Further work includes developing algorithms of bubble ellipse reconstruction using Hough transform and using methods of Gray-level Co-occurrence Matrix for flow regime classification. Algorithm and results Future work 5. Interactive segmentation To study the behavior of a single bubble, we segment out the bubble of interest from the rest of the other bubbles. A. Provide hints of samples for foreground and background by marking connected lines as in the right figure. These samples form sample distribution for the foreground and background. B. From the user-provided samples, estimate the conditional probability densities ! " ℱ), ! " ℬ) for foreground and background. To resolve non-smoothness and sparsity of the densities, use nonparametric smoothing technique to smooth these densities. Use kernel smoothing with Epanechnikov kernel. C. For every pixel in the image, compute the probability of how each pixel is likely to be the foreground or background using Bayes’s rule, i.e., ! ℱ ") = ((*|ℱ) ( ℱ ⋅((*|ℱ)-( ℬ ⋅((*|ℬ) . D. For each pair of pixels (x,y) in the image, measure the distance between two points regarding how likely two points belong to the same group. Specifically, compute geodesic distance defined by . ", / = min 34,5 ∫ |7 8 ⋅ 9:*,; 8 | ; * , where 7 8 = 9! ℱ 8) and :*,; 8 is any arbitrary path from pixel " to /. E. Computing . ", / for each pair of pixels reduces to computing shortest path in a discretized image space with 4-neighbour scheme. Use Dijstra’s single source shortest path algorithm to compute all the distances, which takes time complexity of =(> log >), where > is the total number of pixels in the image. F. Based on the user-provided samples and computed distances, determine whether a given pixel " is more likely to belong to the foreground or background.4. Image inpainting In order to recover the original image after segmenting the single bubble, we need to inpaint the regions where all the other bubbles are removed. A. Detect all the bubbles using edge detection techniques B. Remove all the bubbles from the image except the selected one. C. Inpaint the removed regions B by solving ∆D = 0 over B with Dirichlet boundary condition. 2. Penetration depth The penetration depth is defined as the bubble’s penetrating distance along the upper edge of the nozzle, which is a significant feature for bubbles that is determined by different diameters of nozzle and fluid speed. A. Use Canny-edge detector to process binary images and choose proper threshold to generate clear edge of the first bubble. B. Use loops to find peak values in a set of bubble images 3. Departure frequency Bubble departure frequency is the rate of generating new bubbles from the nozzle. A. Use Canny-edge detector to find the upper horizontal edge of the nozzle, using an imaginary horizontal line for scanning. B. Detect the moment when each bubble just separates from the nozzle by sweeping the scan line. C. Based on the recorded separated points, calculate the number of images between two seperated moments to get departure frequency. 6. Bubble detection The goal of this algorithm is to detect the position of the region of bubble by labeling the connection components. This method is useful for further extracting the property information in bubble images. A. After image preprocessing, the connected components of the binary image is labeled with arbitrary numbers (“1” to “8”). B. With the labeled binary image, the numbers are reindexed based on the barycenter of the bubble from bottom to top. Therefore, the positions and regions of the bubbles are easily detected. Objectives