فهرست:
مقدمه 1
استخراج معادلات 1
تعريف دستگاههاي مختصات و بارگذاري 1
تجزيه و تحليل نيروها و ممان ها روي دستگاه مختصات و قوانين نيوتن و اويلر 2
انتخاب حالت ها و معرفي كنترلر 2
تحليل پايداري 3
بررسي كنترل پذيري 3
طراحي كنترلر انتگرال دار از نوع اول 4
شبيه سازي 6
بررسي مشاهده پذيري 7
طراحي مشاهده گر 8
شبيه سازي 8
طراحي مشاهده گر كاهش مرتبه، از روش ليونبرگر 8
طراحي مشاهده گر كاهش مرتبه، از روش پارتيشن بندي ماتريس حالت 9
طراحي كنترل خطي بهينه 10
شبيه سازي 11
پيوست 16
4.
مقدمه:
در اينپروژه قصد داريم تا با استفاده از روش هاي كنترل پيشرفته وضعيت عمودي هواپيمـاي دم -
نشين با توجه به شرايط اوليه اي كه تعريف مي كنيم را كنتـرل كنـيم، مبـاحثي كـه در ايـن پـروژه
بكارگرفته مي شوند عبارتند از فضاي حالت، خطي سازي، بررسي پايـداري، كنتـرل پـذيري ، مـشاهده
،full state observer طراحي ،full state feedback پذيري، طراحي كنترلر انتگرالي بصورت
براي كنترل وضعيت، طراحي مشاهده گر مينيمم رتبه و در انتها controller و observer تركيب
كنترل خطي بهينه سيستم.
استخراج معادلات:
براي توليد معادلات سيستم ابتدا دستگاهه اي مختصات مورد نياز تعريف شده ، سپس فوانين نيوتن
و اويلر نوشته مي شوند.
تعريف دستگاههاي مختصات و بارگذاري:
يكي از دستگاههاي مختصات را روي جسم متحرك متصل نموده، كه همان دستگاه بدني مي باشد و
براي بررسي حركت وضعي اين دستگاه از يك دستگاه مختصات اينرسي استفاده مي كنيم و با توجه
به اينكه در ارتفاعات كم اين شبيه سازي انجام مي شود، مي توان از دستگاه مختـصات عمـود محلـي
استفاده نمود.
١
شكل 1- نيروها و ممان ها
θ
Y I
X I
Y B
X B
Τ
δ
Μ
g
5.
تجزيه و تحليلنيروها و ممان ها روي دستگاه مختصات و قوانين نيوتن و اويلر:
از آنجايي كه هيچ گونه نيرو و م مان آيروديناميكي وجود ندارد، تنها نيروهاي وزن و تراست موتـور و
ممان ناشي از بازوي تراست هستند كه بر مركز جرم ما عمل مي كنند كه در شكل زير و معادلات 1
مشخص شده اند.
θ
Y I
Y B
X B
Tcosδ
Tsinδ θ
g
T sin sin + T cos cos + mg = my ⇒ T cos( − )
=
my
sin cos cos cos sin( )
− + = ⇒ − =
( sin ).( )
٢
شكل 2- نيروهاي موثر در مركز جرم
Σ Σ Σ
I
x
F =
my
I
y
F =
mx
=
&&
&&
θ&&
I
z
M I
-1
δ θ δ θ θ δ
&& &&
T δ θ T δ θ mx T θ δ
mx
&&
δ θ
&& &&
T X I
=
T .
V X I
انتخاب حالت ها و معرفي كنترلر:
با توجه به اين نكته كه در انتخاب متغيرهاي حالت آزاد هستيم و با تعاريف متفـاوت از متغيرهـاي
حالت،مقادير ويژه ماتريس حالت و بنابراين مشخصه هاي سيستم ما تغيير نمي كنند، و با توجـه بـه
نياز ما براي كنترل وضعيت عمودي هواپيما، مسافت افقي هواپيما تا ديوار (سـكوي پرتـاب ) و زاويـه
انحراف از خط عمود بر سطح زمين را بعنوان متغيرهاي حالت و زاويـه تراسـت بعنـوان كنترلـر مـا
انتخاب مي شوند، كه بع د از خطي سازي به معادلات 2 مي رسيم؛ در خطي سازي زوايـاي مـا كوچـك
فرض مي شوند.
6.
⎧
⎪ ⎪⎪
⎨
⎧
⎪⎪ ⎪ ⎪
⎨
٣
=
X
1
& &
X X
= =
2 1
X =
x
3
X X x
4 3
&
X =
X
1 2
=
⎧
T X u mX
⎪ ⎪
⎨
sin( )
X X
1 4
1 2
X . T sin
u IX
. 2
X u X u T
X T
3 4
.sin
X u T
2
&
&
X X
3 4
X T
.
.
= − = ⎛ − ≈ −
( )
⎪ ⎪ ⎪ ⎪
⎩
⎞
⎟⎠
1 sin( ) sin cos cos sin )
⎜⎝
=
⎪ ⎪
⎩
=
=
=
− =
⇒
⎪ ⎪ ⎪
⎩
=
= =
〈〈
X u
m
m
m
u
I
X
X X
u
X u
T V
T V
1
,
4 1 1 1
&
&
&
&
&
& &
δ
θ
θ
-2
0 1 0 0
0 0 0 0
0 0 0 1
⎤
⎥ ⎥ ⎥ ⎥
⎦
⎡
=
⎢ ⎢ ⎢ ⎢
0
17.442
⎣
⎤
⎥ ⎥ ⎥ ⎥ ⎥
⎦
⎡
⎡
T
T X
⎢ ⎢ ⎢ ⎢ ⎢
⎣
−
=
⎤
⎥ ⎥ ⎥ ⎥
⎦
⎡
=
⎢ ⎢ ⎢ ⎢
⎣
⎤
⎥ ⎥ ⎥ ⎥ ⎥
⎦
⎢ ⎢ ⎢ ⎢ ⎢
⎣
−
=
0
10
I
0
.
0
0 1 0 0
0 0 0 0
0 0 0 1
10 0 0 0
cos( ) 0 0 0
.
1
T
m
B
X u
m
A
T V
تحليل پايداري:
از روي معادلات خطي سازي شده مي توان مقادير ويژه را حساب نمود و با توجه به علامـت و مقـدار
آن راجع به پايداري سيستم اظهار نظر كرد، همانگونه كه در رابطه 3 مشاهده مي كنيد كليه مقـادير
ويژه در مبدأ قرار دارند، پس سيستم از لحاظ پايداري، پايداري خنثي دارد.
-3
0 0
1 0 0
0 0 0
0 0 1
0 0
1 2 3 4 = ⇒ = = = =
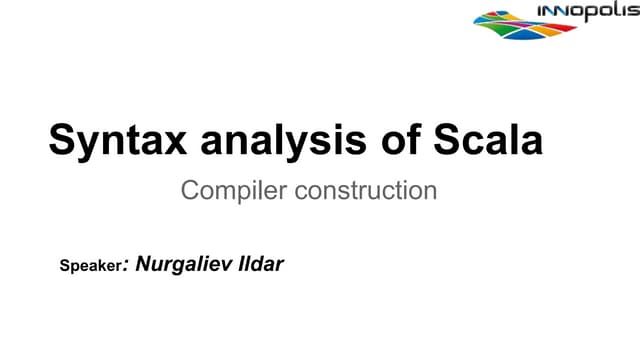
بررسي كنترل پذيري:
در صورتي كه ماتريس رابطه 4 مرتبه كامل باشد، سيستم ما كنترل پذير خواهد بود.
−
−
−
− = λ λ λ λ
λ
λ
λ
λ
λ
T
m
I A
7.
2 3
PB AB A B A B
T X
⎧
⎪ ⎪
⎨
٤
-4
[ ]
0 0 0
T X
m I
T
m
T X
T
⎡
=
Pis full rank controllable
T X
m I
m
I
I
P
T V
T V
T V
T V
⇒ ⇒
= ≠
⎤
⎥ ⎥ ⎥ ⎥
0 17.442 0 0
17.442 0 0 0
0 10 0 174.41
⎦
⎡
⎢ ⎢ ⎢ ⎢
⎣
−
−
=
⎤
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦
⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣
−
−
=
9.25 0
10 0 174.41 0
0
.
.
0
.
.
0 0
.
0 0
.
0
.
2
.
2
.
.
طراحي كنترلر انتگرال دار از نوع اول:
با توجه به اينكه سيستم اصلي ما داراي قطب در صفر مي باشد و خود سيستم داراي انتگرال گير
است، پس در فرآيند طراحي نيازي به قرار دادن يكي از مقادير قطب در صفر براي طراحي سيستم
مطلوب نمي باشد.
جايدهي قطبها:
از طريق جايدهي قطبهاست كه خواص سيستم در پايـداري و ميـزان مقاومـت آن بـه اخـتلالات را
تعيين مي كنيم، قطبهاي انتخابي بايد وظايفي را بر عهده گيرند از جمله:
-1 كاهش خطاي ماندگار
-2 پاسخ سريع به ورودي ها
-3 مقاومت در برابر نويز
-4 پايداري سيستم
كه عواملي درگير با هم بوده و تقويت يكي موجب تضعيف ديگري خواهد شد و انتخـاب آنهـا ، بـه
اهميت فرد طراح در مورد هر خاصيت با توجه به مسأله طراحي بستگي دارد.
در اين پروژه با توجه به نياز به تعريف 4 قطب، از 1 قطب مـزدوج بـراي كـاهش خطـاي مانـدگار
(خاصيت نوساني ) و دو ق طب حقيقي منفي دورتر براي تأمين پايداري سيستم استفاده مـي كنـيم،
براي طراحي قطب هاي مزدوج از خواص فركانس طبيعي و ضريب ميرايـي كـه خـود مـي توانـد از
زمان قرار و ميزان فراجهش سيستم ، طبق روابط 5 استفاده م يشود، تأمين مي گردند.
⎪ ⎪
⎩
−
O S
ln( . )
Π +
=
=
ln ( . )
4
2 2 O S
t
n
s
ζ
ζω
-5
8.
با توجه بهگراف رسم شده براي كنترلر انتگرال دار نوع اول، روابط فضاي حالت مـا طبـق 6 خواهـد
بود.
⎩ ⎨ ⎧
B
K
t O S
⎧
⎪ ⎪ ⎪
O S
⎨
⎧
٥
A
C
شكل 3- سيستم كنترلي انتگرال دار روي متغيرهاي حالت
X A BK X BV
X = AX +
BU ⇒ = − +
U = V −
KX
& ( )
&
-6
در اينجا مقادير زمان قرار و ميزان فراجهش و دو قطب ديگر به صورت زير انتخاب شده اند:
ω
⎩ ⎨ ⎧
=
=
⇒
⎪ ⎪ ⎪
⎩
4 , ln( . )
. 20%
=
=
−
2 2
Π +
= =
1.2533
.4559
7sec
ln ( . )
ζ
ζ
ζω
n
s
n
s
t
O S
⎪⎩
⎪⎨
S + 2 ζω S + ω
= S + 1.1429 S + 1.5707 ⇒ S = − .5714 ±
1.1154
i n n = −
4
7
= −
3
4
1,2
2 2 2
S
S
كه در نهايت سيستم دلخواه ما بصورت زير خواهد بود:
Desired : (S + 4)(S + 7)(S 2 +1.1429S +1.5707)= S 4 +12.1429S 3 + 42.1421S 2 + 49.2776S + 43.9793
با برابر قرار دادن مقادير ويژه مطلوب و سيستم مطلوب ضرايب كنترلي ما بدست مي آيند.
9.
SI A BKSI A
det( − ( − )) = det( −
)
− − =
1 0 0
k s k k k
17.4417 17.4417 17.4417 17.4417
1 2 3 4
s
0 0 1
SI A BK S k k S k k S k S k
det( ( )) (17.4417 10 ) (17.4417 10 ) (174.4169 ) 174.42 0
٦
−
+
−
− − − − −
⎫
⎪ ⎪
⎬
⎪ ⎪
⎭
⎧
⎪ ⎪
⎨
⎪ ⎪
⎩
⇒ =
⎫
⎪ ⎪
⎬
⎪ ⎪
⎭
⎧
⎪ ⎪
⎨
⎪ ⎪
⎩
⇒ =
⎧
⎪ ⎪
⎨
⎪ ⎪
⎩
=
=
=
=
⇒
− − = + − + − + + =
2.5607
.8582
.2522
.2825
2.5607
.8582
.2522
.2825
10 10 10 10 10
det( ( ))
k
1
2
3
4
k
1
2
3
4
4 3
2
1 3
3
2 4
4
1 2 3 4
K
k
k
k
K
k
k
k
k k k s k
s
SI A BK
و در نهايت ماتريس حالت ما بفرم زير خواهد بود:
A A BK new ~ = −
شبيه سازي:
نتايج بدست آمده با مقدار اوليه
⎤
⎥ ⎥ ⎥ ⎥
⎦
pi
10* /180
⎡
=
⎢ ⎢ ⎢ ⎢
⎣
.1* /180
2
.01
0
pi
x
شكل 4- نتايج بدست آمده شبي هسازي قسمت 6 پروژه
10.
0 0 10
0 0 0 1
0 0 0
T
0 0 0
m
T
m
C
CA
⎧
=
⎪ ⎪
⎨
CA
CA
Q
⎡
=
⎢ ⎢ ⎢ ⎢
0 0 1 0
0 0 0 1
10 0 0 0
⎣
⎤
⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦
⎡
⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣
=
⎫
⎪ ⎪
⎬
⎪ ⎪
⎭
⎪ ⎪
⎩
0 10 0 0
2
3
Q Qis full rank Observable
0
≠ ⇒ ⇒
ˆ ) ( ) ˆ ( ˆ ˆ&
⎤
⎥ ⎥ ⎥ ⎥
⎦
x Ax Bu K y y A K C x Bu K y
٧
بررسي مشاهده پذيري:
در صورتي كه ماتريس رابطه 7 مرتبه كامل باشد، سيستم ما مشاهده پذير خواهد بود
-7
طراحي مشاهده گر:
با توجه به شـكل زيـر روابـط 9 بـراي
معادله تخمين گر صادق مي باشد.
= + + − = − + +
( )
SI A K C SI A
e
e e e
− − = −
-9
شكل 5- مشاهده گر
با جايگذاري ماتريس هاي حالت به رابطه زير براي تعيين ضرايب تخمين گر مي رسيم:
3 4 1 2
s k
1 0
e
1
s k
0 0
s k
0 0 1
4
3
2
10 10
10 0
4 3 2
e e e e
e
e
e
S k S k S k S k
k s
= + + + +
−
+ −
−
با توجه به نوع مسأله نياز به انتخاب 4 قطب داريم كه با توجه بـه خاصـيت مـشاهده گـر كـه بايـد
سريعتر از خود سيستم اصلي پاسخ دهد، بايد اين قطبهـا كمـي دورتـر نـسبت بـه قطبهـاي اصـلي
سيستم قرار گيرند ، كه براي اين مسأله به صورت زير در نظر گرفته م يشـود (چـون بايـد سـريعتر از
خود سيستم جواب دهد زمان قرار در 4 ثانيه و دو قطب ديگر دورتر انتخاب شده اند).
11.
⎧
⎪⎩
⎪⎨
⎧
⎪ ⎪
⎨
٨
=
.4559
5sec
t
O S
ω
S + 2 S + = S + 1.6 S + 3.0785 ⇒ S = − .8 ±
1.5616
i
= −
7
= −
⎩ ⎨ ⎧
=
⇒
⎩ ⎨ ⎧
=
=
9
1.7546
. 20%
3
4
1,2
2 2 2
S
S
n n
n
s
ζω ω
ζ
desired : S 4 +13.66S 3 + 64.92S 2 +142.06S +169.8
⎪ ⎪
⎩
=
=
=
=
15.0057
19.3949
17.6
91.6785
e
3
2
e
e
1
2
e
k
k
k
k
شبيه سازي:
نتايج بدست آمده با مقدار اوليه
⎤
⎥ ⎥ ⎥ ⎥
⎦
pi
10* /180
⎡
=
⎢ ⎢ ⎢ ⎢
⎣
.1* /180
2
.01
0
pi
x
شكل 6- نتايج بدست آمده شبي هسازي قسمت 9 پروژه
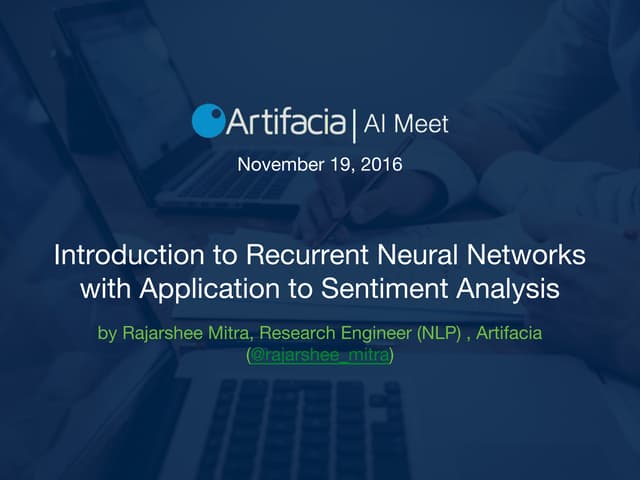
طراحي مشاهده گر كاهش مرتبه، از روش ليونبرگر:
براي شروع طراحي در ابتدا بايد مشاهده پذيري سيستم چك شود، در صورت مشاهده پذيري امكـان
ادامه كار وجود دارد؛ از آنجا كه مشاهده گر بايد سريعتر از سيستم واقعي پاسخ دهد، كافيست كمـ ي
را تشكيل دهيم، سـپس بـا D دورتر از مقادير ويژه سيستم واقعي قطبها را در نظر گرفته و ماتريس
12.
C
مـا مرتبـه
⎧
C
C
A
⎤
⎡
⎤
⎥ ⎥ ⎥ ⎥
⎦
⎡
=
⎡
⎢ ⎢ ⎢ ⎢
⎣
−
⎤
A A A A
A A A C
٩
⎤
انتخاب ماتريس G خواه بايد بطور دل T ⎥اي بيابيم كـه در نهايـت مـاتريس گونه را به ⎦
⎡
T
⎢⎣
( كامل باشد.(روابط 10
-10
⎪⎩
⎪⎨
D EU Gy
= + +
DT TA GC
=
− + =
E TB
0
ζ& ζ
در مرحله اول مشاهده مي كنيم كه يكـي از متغيرهـاي حالـت را مـي تـوانيم در خروجـي محاسـبه
پس با توجه به تعداد كل متغيرهاي حالت تنها نياز به طراحي مشاهده گر رتبه 3 داريم. ،(θ& ) كنيم
براي شروع به تست مشاهده پذيري سيستم مي پردازيم:
[ ]
rank Q our sys isn t observable
0 1 0 0
C
CA
⎡
=
CA
CA
Q
( ) 0 '
0 1 0 0
0 0 0 0
⎤
⎡
=
⎤
2 ⇒ = ⇒
0 0 0 0
0 0 0 0
3
⎥ ⎥ ⎥ ⎥
⎦
⎢ ⎢ ⎢ ⎢
⎣
⎥ ⎥ ⎥ ⎥
⎦
⎢ ⎢ ⎢ ⎢
⎣
=
پس امكان ادامه كار وجود ندارد.
طراحي مشاهده گر كاهش مرتبه، از روش پارتيشن بندي ماتريس حالت:
در اين روش كافيست در ابتدا كليه متغيرهاي حالتي را كه در خروجي قابل اندازه گيري هـستند بـه
بالاترين رديف ماتريس حالت آورده و كليه ماتريس هاي حالت و كنترل را مرتب مي كنيم، سپس بـا
جداكردن مقادير قابل اندازه گيري به صورت پارتيشن بندي از ساير درايه هـا (مطـابق روابـط 11 )، در
نهايت ماتريس حالت جديد و ماتريس خروجي جديد را تعريف كـرده و بقيـه رونـد طراحـي مـشابه
روش طراحي مشاهده گر رتبه كامل خواهد بود.
-11
[ ]
0 1 0 0
0 0 0 0
0 1 0 0
0 0 0 1
10 0 0 0
[ ]
17.4417
0
0
10
aa ab ba bb
; ;
0
0
= =
new bb ba
SI A K C SI A K A
( ) ( )
1 0 0
0 0 1
0 0 0
;
10
0; 0 0 0 ;
e bb e ab
B
∴ − − = − −
⎤
⎥ ⎥ ⎥
⎦
⎡
=
⎢ ⎢ ⎢
⎣
⎥ ⎥ ⎥
⎦
⎢ ⎢ ⎢
⎣
= = =
=
⎥ ⎥ ⎥ ⎥
⎦
⎢ ⎢ ⎢ ⎢
⎣
=
13.
نمي توان قطبهايمشاهده گر Ke پس به ازاي هيچ مقداري از ، Aab = [ با توجه به اينكه [ 0 0 0
را در محل مورد نظر خواسته شده طراح قرار داد، پس با اين روش هم امكان طراحـي مـشاهده گـر
كاهش مرتبه وجود ندارد.
طراحي كنترل خطي بهينه:
∞ ∗ ∫
J = x Q x +
u Ru dt
k R B P
u kx
⎧
⎪ ⎪ ⎪
Q
⎨
١٠
كه خود از معادله ريكاتي استخراج مي شود، استفاده مي كنيم. LQR براي اين منظور از روش
0
*
( )
1 *
0
* 1 *
+ + − =
=
−
−
A P PA Q PBR B P
-12
پرداخته و طبق رونـد اثبـات در كتـاب تنهـا P به محاسبه ماتريس Q و R با انتخاب ماتريس هاي
و متعاقـب P كه مثبت و تعريف شده باشند، قابل قبول خواهند بود؛ بعـد از محاسـبه P مقاديري از
از روابط 12 فرمان كنترلي و معادله حالت جديد بدست مي آيند. ، k آن
x A Bk x
= −
x Ax Bu
⇒ = ( − )
⎩ ⎨ ⎧
= +
&
&
به صورت زير تعريف شده كه نتايج آن نيز محاسبه شده اند. R و Q در اينجا ماتريس
⎧
⎪ ⎪ ⎪ ⎪ ⎪
⎨
⎪ ⎪ ⎪ ⎪ ⎪
⎩
2.2241 .4297 .3255 .4372
.4297 .1157 .0747 .989
.3255 .0747 .1573 .0987
.4372 .0989 .0987 .1227
⎤
⎥ ⎥ ⎥ ⎥
⎦
⎡
=
3.1217
⎡
=
⎢ ⎢ ⎢ ⎢
1.0292
⎣
⎤
⎥ ⎥ ⎥ ⎥
⎦
⎢ ⎢ ⎢ ⎢
⎣
⇒
⎪ ⎪ ⎪
⎩
1 0 0 0
⎡
=
=
⎤
⎥ ⎥ ⎥ ⎥
⎦
⎢ ⎢ ⎢ ⎢
⎣
.3162
.4974
1
0 .2 0 0
0 0 .1 0
0 0 0 .05
P
K
R
با توجه به خواست مسأله تنها به يكي از متغيرهاي حالت ،(K) بعد از بدست آوردن مقادير كنترلي
مقدار اوليه وارد كرده و رفتار كنترلر را بررسي مي كنيم؛ توجه به اين نكته لازم اسـت θ& يا θ اوليه
0 راديان اسـتفاده كـرديم، پـس در كليـه / كه ما از خطي سازي در زواياي ورودي كوچك حدود 25
0 راديان را بايد دارا باشند. / شبيه سازي ها ورودي ما كه بصورت پله تعريف شده حداكثر مقدار 25
14.
١١
شبيه سازي:
با شرايط اوليه متفاوت LQR به كمك θ شكل 7- تغييرات
با شرايط اوليه متفاوت LQR به كمك θ& شكل 8- تغييرات
15.
١٢
با شرايطاوليه متفاوت LQR به كمك X شكل 9- تغييرات
با شرايط اوليه متفاوت LQR به كمك X& شكل 10 - تغييرات
16.
نتايج:
-1 همانگونهكه در شكل 6 مشخص اسـت، قطـب هـاي مـشاهده گـر در قطـب هـاي كنترلـر تـأثيري
نمي گذارند و تنها زمان پاسخ گويي سيستم سريعت ر مـي شـود (كـاربرد در سيـستم هـاي واقعـي، وارد
كردن كنترلر مناسب بصورت سريعتر) ، البته در لحظه هاي اوليه كمي مقادير تفاوت جزئي دارند.
-2 روش هاي طراحي مشاهده گر كاهش مرتبه، همانند مشاه ده گر مرتبه كامل نياز به مشاهده پذيري
سيستم دارد.
١٣
-3 رفتار متغير حالت مشاهده گر بسيار شبيه به رفتار متغير حالت كنترلر، در طي زمان مي باشد.






![2 3
P B AB A B A B
T X
⎧
⎪ ⎪
⎨
٤
-4
[ ]
0 0 0
T X
m I
T
m
T X
T
⎡
=
Pis full rank controllable
T X
m I
m
I
I
P
T V
T V
T V
T V
⇒ ⇒
= ≠
⎤
⎥ ⎥ ⎥ ⎥
0 17.442 0 0
17.442 0 0 0
0 10 0 174.41
⎦
⎡
⎢ ⎢ ⎢ ⎢
⎣
−
−
=
⎤
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦
⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣
−
−
=
9.25 0
10 0 174.41 0
0
.
.
0
.
.
0 0
.
0 0
.
0
.
2
.
2
.
.
طراحي كنترلر انتگرال دار از نوع اول:
با توجه به اينكه سيستم اصلي ما داراي قطب در صفر مي باشد و خود سيستم داراي انتگرال گير
است، پس در فرآيند طراحي نيازي به قرار دادن يكي از مقادير قطب در صفر براي طراحي سيستم
مطلوب نمي باشد.
جايدهي قطبها:
از طريق جايدهي قطبهاست كه خواص سيستم در پايـداري و ميـزان مقاومـت آن بـه اخـتلالات را
تعيين مي كنيم، قطبهاي انتخابي بايد وظايفي را بر عهده گيرند از جمله:
-1 كاهش خطاي ماندگار
-2 پاسخ سريع به ورودي ها
-3 مقاومت در برابر نويز
-4 پايداري سيستم
كه عواملي درگير با هم بوده و تقويت يكي موجب تضعيف ديگري خواهد شد و انتخـاب آنهـا ، بـه
اهميت فرد طراح در مورد هر خاصيت با توجه به مسأله طراحي بستگي دارد.
در اين پروژه با توجه به نياز به تعريف 4 قطب، از 1 قطب مـزدوج بـراي كـاهش خطـاي مانـدگار
(خاصيت نوساني ) و دو ق طب حقيقي منفي دورتر براي تأمين پايداري سيستم استفاده مـي كنـيم،
براي طراحي قطب هاي مزدوج از خواص فركانس طبيعي و ضريب ميرايـي كـه خـود مـي توانـد از
زمان قرار و ميزان فراجهش سيستم ، طبق روابط 5 استفاده م يشود، تأمين مي گردند.
⎪ ⎪
⎩
−
O S
ln( . )
Π +
=
=
ln ( . )
4
2 2 O S
t
n
s
ζ
ζω
-5](https://image.slidesharecdn.com/bec9af4a-1022-47e4-8329-698c76a5af8b-141205062323-conversion-gate02/75/86203954_prj-7-2048.jpg)




![C
مـا مرتبـه
⎧
C
C
A
⎤
⎡
⎤
⎥ ⎥ ⎥ ⎥
⎦
⎡
=
⎡
⎢ ⎢ ⎢ ⎢
⎣
−
⎤
A A A A
A A A C
٩
⎤
انتخاب ماتريس G خواه بايد بطور دل T ⎥اي بيابيم كـه در نهايـت مـاتريس گونه را به ⎦
⎡
T
⎢⎣
( كامل باشد.(روابط 10
-10
⎪⎩
⎪⎨
D EU Gy
= + +
DT TA GC
=
− + =
E TB
0
ζ& ζ
در مرحله اول مشاهده مي كنيم كه يكـي از متغيرهـاي حالـت را مـي تـوانيم در خروجـي محاسـبه
پس با توجه به تعداد كل متغيرهاي حالت تنها نياز به طراحي مشاهده گر رتبه 3 داريم. ،(θ& ) كنيم
براي شروع به تست مشاهده پذيري سيستم مي پردازيم:
[ ]
rank Q our sys isn t observable
0 1 0 0
C
CA
⎡
=
CA
CA
Q
( ) 0 '
0 1 0 0
0 0 0 0
⎤
⎡
=
⎤
2 ⇒ = ⇒
0 0 0 0
0 0 0 0
3
⎥ ⎥ ⎥ ⎥
⎦
⎢ ⎢ ⎢ ⎢
⎣
⎥ ⎥ ⎥ ⎥
⎦
⎢ ⎢ ⎢ ⎢
⎣
=
پس امكان ادامه كار وجود ندارد.
طراحي مشاهده گر كاهش مرتبه، از روش پارتيشن بندي ماتريس حالت:
در اين روش كافيست در ابتدا كليه متغيرهاي حالتي را كه در خروجي قابل اندازه گيري هـستند بـه
بالاترين رديف ماتريس حالت آورده و كليه ماتريس هاي حالت و كنترل را مرتب مي كنيم، سپس بـا
جداكردن مقادير قابل اندازه گيري به صورت پارتيشن بندي از ساير درايه هـا (مطـابق روابـط 11 )، در
نهايت ماتريس حالت جديد و ماتريس خروجي جديد را تعريف كـرده و بقيـه رونـد طراحـي مـشابه
روش طراحي مشاهده گر رتبه كامل خواهد بود.
-11
[ ]
0 1 0 0
0 0 0 0
0 1 0 0
0 0 0 1
10 0 0 0
[ ]
17.4417
0
0
10
aa ab ba bb
; ;
0
0
= =
new bb ba
SI A K C SI A K A
( ) ( )
1 0 0
0 0 1
0 0 0
;
10
0; 0 0 0 ;
e bb e ab
B
∴ − − = − −
⎤
⎥ ⎥ ⎥
⎦
⎡
=
⎢ ⎢ ⎢
⎣
⎥ ⎥ ⎥
⎦
⎢ ⎢ ⎢
⎣
= = =
=
⎥ ⎥ ⎥ ⎥
⎦
⎢ ⎢ ⎢ ⎢
⎣
=](https://image.slidesharecdn.com/bec9af4a-1022-47e4-8329-698c76a5af8b-141205062323-conversion-gate02/75/86203954_prj-12-2048.jpg)






![١٦
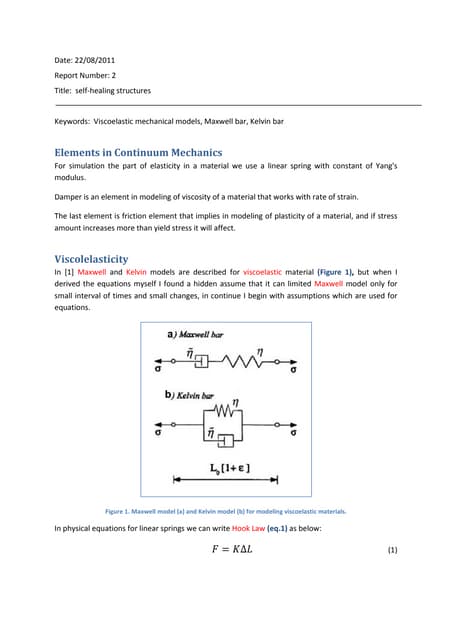
پيوست:
كد برنامه هاي استفاده شده در شبيه سازي:
clc
clear all
m=46;%[Kg]
T=2*230;%thrust
I_yy=24;
X_TV=.91;
A=[0 1 0 0;
0 0 0 0;
0 0 0 1;
T/m 0 0 0;];
B=[0;
T*X_TV/I_yy;
0;
-T/m];
C=[0 1 0 0];
%controllability check
P=[B A*B (A^2)*B (A^3)*B];
if det(P)~=0
disp('our sys is controllable')
else
disp('our sys is uncontrollable')
end
%observability check
N=[ C;
C*A;
C*(A^2);
C*(A^3)];
if det(N)~=0
disp('our sys is observable')
else
disp('our sys is unobservable')
end
Q=[1 0 0 0;
0 .2 0 0;
0 0 .1 0;
0 0 0 .05];
R=1;
[K,p] = LQR(A,B,Q,R)
clc
clear all
do_u='y';
while do_u=='y'
t_s=input('please enter ts= ');
o_s=input('please enter O.S(%)= ');
o_s=o_s/100;
zita=-log(o_s)/(sqrt(pi^2+(log(o_s))^2));
omega_n=4/(zita*t_s);
a=1;b=2*zita*omega_n;c=omega_n^2;
P1=[a b c];
root_s=roots(P1)
P2=input('please enter ploe1= ');
P3=input('please enter plole2= ');](https://image.slidesharecdn.com/bec9af4a-1022-47e4-8329-698c76a5af8b-141205062323-conversion-gate02/75/86203954_prj-19-2048.jpg)
![pre=conv(P1,[a P2]);
pre=conv(pre,[a P3]);
k3=pre(5)/174.4169;
k4=pre(4)/174.4169;
k1=(pre(3)+10*k3)/17.4417;
k2=(pre(2)+(10*k4))/17.4417;
char_mat=['<k1= ' num2str(k1) '> <k2= ' num2str(k2) '> <k3= '
num2str(k3) '> <k4= ' num2str(k4) '>'];
disp(char_mat)
do_u=input('do u want to do again?(y/n)','s');
if do_u=='n'
١٧
break
end
end
clc
clear all
do_u='y';
while do_u=='y'
t_s=input('please enter ts= ');
o_s=input('please enter O.S(%)= ');
o_s=o_s/100;
zita=-log(o_s)/(sqrt(pi^2+(log(o_s))^2));
omega_n=4/(zita*t_s);
a=1;b=2*zita*omega_n;c=omega_n^2;
P1=[a b c];
root_s=roots(P1)
P2=input('please enter ploe1= ');
P3=input('please enter plole2= ');
pre=conv(P1,[a P2]);
pre=conv(pre,[a P3]);
k3=pre(2);
k4=pre(3);
k1=pre(4)/10;
k2=pre(5)/10;
char_mat=['<k1= ' num2str(k1) '> <k2= ' num2str(k2) '> <k3= '
num2str(k3) '> <k4= ' num2str(k4) '>'];
disp(char_mat)
do_u=input('do u want to do again?(y/n)','s');
if do_u=='n'
break
end
end
!Error](https://image.slidesharecdn.com/bec9af4a-1022-47e4-8329-698c76a5af8b-141205062323-conversion-gate02/75/86203954_prj-20-2048.jpg)