بکارگیری وصلههای پیزوالکتریک بصورت حسگر و عملگر به منظور دمپینگ ارتعاشی تیرتیموشنکو براساس طراحی کنترلکننده Fuzzy-GA




![8
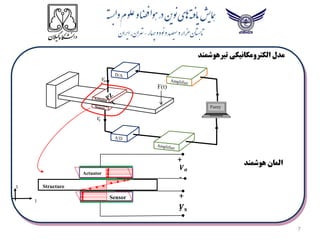
Sensor
Actuator Fuzzy
Controller
حالت فضای مدل
𝑓𝑡𝑜𝑡𝑎𝑙 = 𝑓𝑒 + 𝑓𝑝
𝑀𝑠𝑚𝑎𝑟𝑡 𝑞 + 𝐶𝑠𝑚𝑎𝑟𝑡𝑞 + 𝐾𝑠𝑚𝑎𝑟𝑡 𝑞 = 𝑓𝑡𝑜𝑡𝑎𝑙
𝐶 = [0 i(t)]
𝐵 =
0
𝑓𝑒
𝑀𝑠𝑚𝑎𝑟𝑡
𝐴 =
0 𝐼
−
𝐾𝑠𝑚𝑎𝑟𝑡
𝑀𝑠𝑚𝑎𝑟𝑡
−
𝐶𝑠𝑚𝑎𝑟𝑡
𝑀𝑠𝑚𝑎𝑟𝑡
𝑦 = 𝐶𝑥 𝑡 + 𝐷𝑢(𝑡)
𝑥 = 𝐴𝑥 𝑡 + 𝐵𝑢 𝑡 + 𝐸𝑟 𝑡
𝐷 = 0
𝐸 =
0
𝑓𝑝
𝑀𝑠𝑚𝑎𝑟𝑡](https://image.slidesharecdn.com/2-240215103636-9738da9f/85/Fuzzy-GA-8-320.jpg)