Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
amirdepmood
58 views
سیستم-کنترل-خطی-محبی-قسمت-اول.pdf
سیستم های کنترل خطی
Education
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 63
2
/ 63
3
/ 63
4
/ 63
5
/ 63
6
/ 63
7
/ 63
8
/ 63
9
/ 63
10
/ 63
11
/ 63
12
/ 63
13
/ 63
14
/ 63
15
/ 63
16
/ 63
17
/ 63
18
/ 63
19
/ 63
20
/ 63
21
/ 63
22
/ 63
23
/ 63
24
/ 63
25
/ 63
26
/ 63
27
/ 63
28
/ 63
29
/ 63
30
/ 63
31
/ 63
32
/ 63
33
/ 63
34
/ 63
35
/ 63
36
/ 63
37
/ 63
38
/ 63
39
/ 63
40
/ 63
41
/ 63
42
/ 63
43
/ 63
44
/ 63
45
/ 63
46
/ 63
47
/ 63
48
/ 63
49
/ 63
50
/ 63
51
/ 63
52
/ 63
53
/ 63
54
/ 63
55
/ 63
56
/ 63
57
/ 63
58
/ 63
59
/ 63
60
/ 63
61
/ 63
62
/ 63
63
/ 63
More Related Content
PDF
#1_AAA_control_system(2).pdf
by
SanazGerameifar
PPTX
Training experiments for path planning tasks
by
davidbdavit
PPTX
Pid controllers
by
Pourya Parsa
PDF
طراحی کنترلر فازی PID برای میرایی ارتعاشی تیر تیموشنکو یک سر گیردار با استفاد...
by
Shanghai Jiao Tong University
PPTX
سیستم های عامل فصل ۱
by
Shayan Khaksar
PPT
کنترول و نظارت.ppt
by
HabibFatimi
PPSX
آموزش رویکرد سیستمی - 1387
by
Alireza Mojahedi
PDF
نگار پژوه :: کنترل گشتاور چرخشی با کنترلر فازی
by
Mojtaba Hasanlu
#1_AAA_control_system(2).pdf
by
SanazGerameifar
Training experiments for path planning tasks
by
davidbdavit
Pid controllers
by
Pourya Parsa
طراحی کنترلر فازی PID برای میرایی ارتعاشی تیر تیموشنکو یک سر گیردار با استفاد...
by
Shanghai Jiao Tong University
سیستم های عامل فصل ۱
by
Shayan Khaksar
کنترول و نظارت.ppt
by
HabibFatimi
آموزش رویکرد سیستمی - 1387
by
Alireza Mojahedi
نگار پژوه :: کنترل گشتاور چرخشی با کنترلر فازی
by
Mojtaba Hasanlu
Similar to سیستم-کنترل-خطی-محبی-قسمت-اول.pdf
PDF
teleoperationنگار پژوه :: تله اپراتور برای آموزش جراحی رباتیک
by
Mojtaba Hasanlu
PDF
جزوه کنترل مدرن دکتر روح اله برزمینی بخش دوم
by
Pourya Parsa
PDF
آموزش کنترلرهای تطبیقی خود تنظیم با متلب بخش سوم (الف)
by
faradars
PPTX
سیستمهای کنترل تردد نوین
by
Amin Younesi
PDF
آموزش کنترلرهای تطبیقی خود تنظیم با متلب بخش دوم (الف)
by
faradars
PDF
آموزش کنترلرهای تطبیقی خود تنظیم با متلب بخش اول
by
faradars
PDF
آموزش کنترلرهای تطبیقی خود تنظیم با متلب - بخش اول | فرادرس
by
faradars
PPTX
سیستم های عامل فصل ۲
by
Shayan Khaksar
PPTX
Chaos control
by
Pourya Parsa
PDF
آموزش سیستم های عامل - بخش پنجم
by
faradars
PPTX
سیستم های عامل فصل ۵
by
Shayan Khaksar
PDF
آموزش سیستم های عامل - بخش دوم
by
faradars
PDF
سیستم اعلام حریق آدرسپذیر چیست؟
by
Mohammad Karimi
PPTX
سیستم های عامل فصل ۳
by
Shayan Khaksar
PDF
MPC_CH3_Commersial MPC-d6ty7wd5ctgt7ppe43tsrx1wtc.pdf
by
khanifateme
PPTX
ساختارهای کنترولی درجاوا
by
Sebghatullah Karimi
PDF
definition and analysis of power system resiliency.pdf
by
AliZangeneh1
PDF
منطق فازی
by
Shiraz LUG
PDF
منطق فازی
by
Marie Behzadi
PPTX
چرخه عمر در توسعه سیستم های خبره
by
mina dorcheh
teleoperationنگار پژوه :: تله اپراتور برای آموزش جراحی رباتیک
by
Mojtaba Hasanlu
جزوه کنترل مدرن دکتر روح اله برزمینی بخش دوم
by
Pourya Parsa
آموزش کنترلرهای تطبیقی خود تنظیم با متلب بخش سوم (الف)
by
faradars
سیستمهای کنترل تردد نوین
by
Amin Younesi
آموزش کنترلرهای تطبیقی خود تنظیم با متلب بخش دوم (الف)
by
faradars
آموزش کنترلرهای تطبیقی خود تنظیم با متلب بخش اول
by
faradars
آموزش کنترلرهای تطبیقی خود تنظیم با متلب - بخش اول | فرادرس
by
faradars
سیستم های عامل فصل ۲
by
Shayan Khaksar
Chaos control
by
Pourya Parsa
آموزش سیستم های عامل - بخش پنجم
by
faradars
سیستم های عامل فصل ۵
by
Shayan Khaksar
آموزش سیستم های عامل - بخش دوم
by
faradars
سیستم اعلام حریق آدرسپذیر چیست؟
by
Mohammad Karimi
سیستم های عامل فصل ۳
by
Shayan Khaksar
MPC_CH3_Commersial MPC-d6ty7wd5ctgt7ppe43tsrx1wtc.pdf
by
khanifateme
ساختارهای کنترولی درجاوا
by
Sebghatullah Karimi
definition and analysis of power system resiliency.pdf
by
AliZangeneh1
منطق فازی
by
Shiraz LUG
منطق فازی
by
Marie Behzadi
چرخه عمر در توسعه سیستم های خبره
by
mina dorcheh
سیستم-کنترل-خطی-محبی-قسمت-اول.pdf
1.
1 دولتی ای حرفه
و فنی دانشگاه بندرعباس پسران خطی کنترل سیستم استاد : محبی محسن دکتر
2.
2 محبی محسن دکتر
www.Mohebbii.ir
3.
3 سیستم : سیستم عبارت است از مجموعه ای از اجزای فیزیکی که با ترتیب خاصی به یک دیگر متصل یا مربوط شده اند و مجموعه مزبور به صورت یک واحد منسجم برای رسی دن به مقصود مشخص یا ارضا شرط ویژه ای عمل نماید . کنترل : میرود بکار فرماندهی
یا هدایت ،تنظیم معنی به کنترل کلمه . محبی محسن دکتر www.Mohebbii.ir
4.
4 كنترل سيستم سيستم كنترل : مجموعه اي از اجزاء به هم پيوسته است كه هدف آن فراهم كردن پاسخ مطلوب مي باشد . منظور از كنترل يك سيستم اين است كه رفتار يك يا چند متغير آن به صورت مطلوب در آيد . مثال : تا شود
مي انجام نحوي به كنترل ، خودرو راندن در به مسير يك طي با شخص برسد نظر مورد مقصد . محبی محسن دکتر www.Mohebbii.ir
5.
5 سیگنال یا عالمت Signal : • هر نوع محرکه ای است که برای انتقال اطالعات بکار گرفته ش ود را عالمت یا سیگنال گویند . • در سیستم های فیزیکی محرکه هایی مثل ،جابجایی ،فشار ول ،تاژ جریان و حرارت می توانند برای انتقال اطالعات و به عنوان سیگ نال مورد استفاده قرار گیرند . محبی
محسن دکتر www.Mohebbii.ir
6.
6 خطا سیگنال پسخورد
یا برگشت مدار : پسخور یا برگشت مدار Feedback : انتقال مجدد عالئم خروجی و اعمال آنها به سیستم به عنوان ،ورودی از طریق مدار برگشت را پسخوراندن مینامند . در چنین حالتی جمع جب ری ورودی و خروجی را ورودی ثانویه تلقی می کنند . خطا سیگنال Error signal : جمع جبری ورودی و خروجی مدار برگشت را خطا می نامند و گاهی آنرا به عنوان ورودی ثانویه به سیستم کنترل در نظر می گیرند . محبی محسن دکتر www.Mohebbii.ir
7.
7 اغتشاش Disturbance : هر نوع عالمت ناخواسته ای که به یک سیستم کنترل وارد شده و منشا تغ ییرات و واکنشهای نامطلوب در خروجی سیستم شود به عنوان اغتشاش شناخته م یشود . اغتشاش می تواند اختالالت عمده ای در فرایند کنترل بوجود آورند و لذا ح ذف آن اهمیت ویژه ای دارد . محبی محسن دکتر
www.Mohebbii.ir
8.
8 خروجی و ورودی : ورودی Input : تحریک یا فرمانی است که از سوی یک منبع انرژی خارجی به سیستم ک نترل وارد شده موجب پیدایش واکنش از سوی سیستم میگردد . بدین ترتیب ورودی منشا تولید پاسخ از سوی سیستم کنترل میشود . خروجی Output : پاسخی است که از سیستم کنترل به عنوان عکس العمل در برابر ورودی ، خارج میشود . ممکن است این پاسخ همان واکنشی که از سیستم انتظار میرود نباشد . محبی
محسن دکتر www.Mohebbii.ir
9.
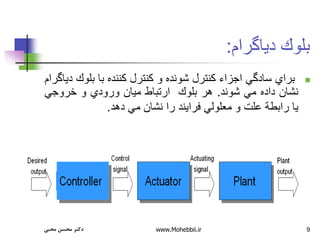
9 دياگرام بلوك : براي سادگي اجزاء كنترل شونده و كنترل كننده با بلوك دياگرام نشان داده مي شوند . هر بلوك ارتباط ميان ورودي و خروجي يا رابطة علت و معلولي فرايند را نشان مي دهد . محبی محسن
دکتر www.Mohebbii.ir
10.
10 تبدیل تابع : Transfer Function تابع تبدیل یک سیستم عبارت است از نسبت خروجی سیستم به ورودی آن . در صورتیکه شرایط اولیه صفر باشد معموال از ورودی و خروجی تبدیل الپالس گرف ته و نسبت تبدیالت الپالس خروجی به ورودی که اطالعات زیادی در مورد رفتار ویژگ یهای فیزیکی سیستم را ارائه میکند تابع تبدیل در فضای الپالس یا مختصرا ت ابع تبدیل مینامند . * در ارتباط با سیستم های گسسته بجای تبدیل الپالس از تبدیل (z-transform) استفاده میشود . محبی
محسن دکتر www.Mohebbii.ir
11.
11 مشخصه معادله : Characteristic Equation مخرج تابع تبدیل سیستم کنترل را معادله مشخصه مینامند . همین معادله است که در بحث پایداری در سیستم های کنترل بسیار مورد استفاده قرار میگی رد . Y(s)=G(s)E(s) E(s)=U(s)-H(s)Y(s) Y(s)=G(s)[U(s)-H(s)Y(s)] Y(s)=G(s)U(s)-G(s)H(s)Y(s)
Y(s)[1+G(s)H(s)]=G(s)U(s) System transfer function =Y(s)/U(s) =G(s)/[1+G(s)H(s)] System characteristic equation= 1+ G(s)H(s) محبی محسن دکتر www.Mohebbii.ir
12.
12 خطی غیر و
خطی کنترل های سیستم Linear And Nonlinear Control Systems وقتی مقدار سیگنالهای موجود در یک سیستم کنترل در حدی باشد که اجز ا سیستم به طور غیر خطی عمل کنند ( یعنی اصل جمع اثار بر رفتار آنها حاکم ب اشد ) سیستم را خطی در نظر میگیرند . اما وقتی که مقدار عالئم از حد عملکرد خطی خارج شود سیستم به طور غیر خط ی عمل خواهد ،کرد مثل حد اشباع در آمپلی فایرها . محبی محسن دکتر www.Mohebbii.ir
13.
13 زمان کنترل های
سیستم - زمان و ثابت - متغییر : زمان کنترل های سیستم - زمان و ثابت - متغییر Time-Invariant And Time-Varying Control Systems - هرگاه پارامترهای یک سیستم کنترل با گذشت زمان تغییر نکرده و به طور د ائم ثابت ،باشد سیستم را زمان ثابت یا LTI میخوانند . - حال آنکه اگر پارامتری در سیستم موجود باشد که با زمان تغییر کند سیست م را زمان متغییر میخوانند محبی محسن دکتر www.Mohebbii.ir
14.
14 زمانی گسسته و
پیوسته های سیستم : سیستم های کنترل پیوسته و گسسته زمانی Continuous-Time And Discrete-Time Control Systems - در سیستم های کنترل پیوسته زمانی کلیه سیگنالها در تمامی بخش های س یستم به صورت تابعی پیوسته از متغییر زمان هستند . - درحالیکه در سیستم های گسسته حاوی عالئمی به صورت پالسهای منفرد بو ده و نقل و انتقال اطالعات معموال از طریق کدهای رقمی انجام میشود . محبی محسن دکتر www.Mohebbii.ir
15.
15 مختلط تابع و
مختلط متغییر : * مختلط متغییر : یک متغییر مختلط مانند s فرض میشود که دارای دو مولفه است . یک مولفه حقیقی و یک مولفه مجازی یا موهومی . * مختلط تابع : تابع G(s) را تابعی مختلط از متغیر مختلط s خوانند اگر برای هر s مقداری متناظر با آن مثل G(s) وجود داشته باشد . از آنجا که s دارای قسمت حقیقی و موهومی است پس G(s) نیز دارای بخش حقیقی و موهومی ،میباشد یعنی : G(s)=Re (G)+j Im(G) محبی محسن دکتر www.Mohebbii.ir
16.
16 تابع یک قطبهای
و منفرد نقاط و تحلیلی توابع : تحليلی توابع : تابع G(s) از متغیر مختلط s را تابع تحلیلی می خوانند اگر تابع G(s) و همه مشتقات آن در ناحیه مزبور موجود باشند . تابع يک قطبهای و منفرد نقاط : نقاط منفرد یک تابع ،مختلط نقاطی از صفحه s هستند که در آنها تابع یا مشتقات آن موجود نباشد . قطب معمولی ترین نوع نقاط منفرد بوده و نقش بسیار مهمی در مطالعه سیستم ها ی کنترل دارد . محبی محسن دکتر www.Mohebbii.ir
17.
17 کنترلی های سيستم
بندی دسته باز حلقه کنترل بسته حلقه کنترل محبی محسن دکتر www.Mohebbii.ir
18.
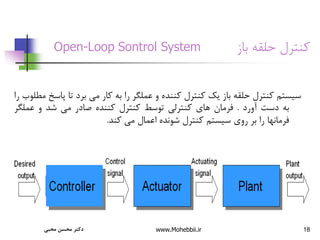
18 باز حلقه کنترل Open-Loop
Sontrol System سیستم کنترل حلقه باز یک کنترل کننده و عملگر را به کار می برد تا پ اسخ مطلوب را به دست آورد . فرمان های کنترلی توسط کنترل کننده صادر می شد و عمل گر فرمانها را بر روی سیستم کنترل شونده اعمال می کند . محبی محسن دکتر www.Mohebbii.ir
19.
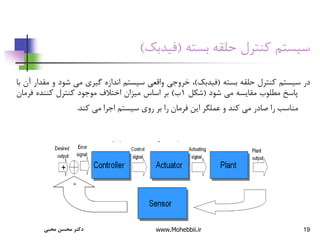
19 بسته حلقه کنترل
سیستم ( فیدبک ) در سیستم کنترل حلقه بسته ( فیدبک ) ، خروجی واقعی سیستم اندازه گیری می شود و م قدار آن با پاسخ مطلوب مقایسه می شود ( شکل 1 ب ) بر اساس میزان اختالف موجود کنترل کننده فرمان مناسب را صادر می کند و عملگر این فرمان را بر روی سیستم اجرا می کند . محبی محسن دکتر www.Mohebbii.ir
20.
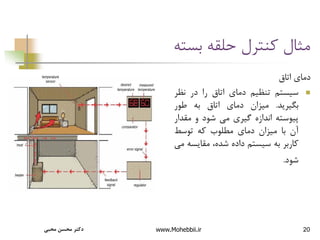
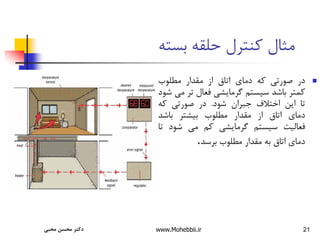
20 بسته حلقه کنترل
مثال اتاق دمای سیستم تنظیم دمای اتاق را در نظ ر بگیرید . میزان دمای اتاق به طور پیوسته اندازه گیری می شود و مقد ار آن با میزان دمای مطلوب که توسط کاربر به سیستم داده ،شده مقایس ه می شود . محبی محسن دکتر www.Mohebbii.ir
21.
21 در صورتی که دمای اتاق از مقدار مطلوب کمتر باشد سیستم گرمایشی فعال تر م ی شود تا این اختالف جبران شود . در صورتی که دمای اتاق از مقدار مطلوب بیشتر باشد فعالیت سیستم گرمایشی کم می شود ت ا دمای اتاق به مقدار مطلوب برسد . بسته حلقه کنترل
مثال محبی محسن دکتر www.Mohebbii.ir
22.
22 کنترل های سیستم
نظریة های کاربرد کاربرد های بسیار زیادی در حوزة علوم بیولوژیکی در حوزة علوم پزشکی تولید تجهیزات تشخیص پزشکی اعضاء مصنوعی توصیف کمی سیستم های کنترل بیولوژیکی از جملة این کاربردهاست . محبی محسن دکتر www.Mohebbii.ir
23.
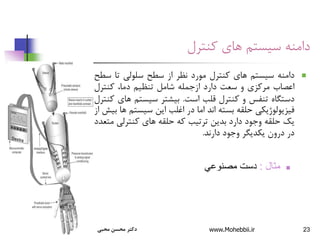
توحیدخواه دکتر 23 دامنه کنترل
های سیستم دامنه سیستم های کنترل مورد نظر از سطح سلولی تا س طح اعصاب مرکزی و سعت دارد ازجمله شامل تنظیم ،دما کنترل دستگاه تنفس و کنترل قلب است . بیشتر سیستم های کنتر ل فیزیولوژیکی حلقه بسته اند اما در اغلب این سیستم ها بیش از یک حلقه وجود دارد بدین ترتیب که حلقه های کنترلی م تعدد در درون یکدیگر وجود دارند . مثال : مصنوعي دست محبی محسن دکتر www.Mohebbii.ir
24.
24 پیچیده های سیستم
کنترل روش : برای کنترل سیستم های پیچیده باید مدل های کمی ( ریاضی ) این سیست م ها را به دست آورد . بنابراین الزم است که رابطه بین متغیرهای سیستم را تحلیل ک رده و مدل ریاضی مناسب به دست آورد . از آنجا که اغلب سیستم ها ًاذات دینامیک می باشند معادالت توصیف کنندة این سیستم ها ًاعموم معادالت دیفرانسیلی خ واهند بود . با استفاده از روش تبدیل الپالس معادالت دیفرانسیل خطی تغییر ناپذی ر با زمان به معادالت جبری تبدیل می شود تا تحلیل و طراحی سیستم های کنترل کنن ده ساده تر شود . در عمل پیچیدگی سیستم ها و عدم آگاهی از تمام عوامل موجود الزم می دارد که فرض هایی در مورد عملکرد سیستم در نظر گرفته شود . محبی محسن دکتر www.Mohebbii.ir
25.
25 كنترل هاي روش برای درك مفاهیم کنترل مقدماتی در مورد ابزار های ریاضی و نمادهای گرافیکی نشان دهندة ساختار سیستم ها نیاز است . .1 تبدیل الپالس .2 تابع تبدیل سیستم .3 نمایش سیستم با بلوك دیاگرام .4 سیستم های کنترل حلقه باز و حلقه بسته محبی
محسن دکتر www.Mohebbii.ir
26.
26 1 - الپالس تبدیل : در اغلب سیستم ها ارتباط بین متغیرهای ورودی و خروجی سیستم با مع ادالت دیفرانسیل مشخص می شود . روش تبدیل الپالس معادالت دیفرانسی لی را که حل آنها مشکل است به معادالت جبری تبدیل می کند . الپالس تبديل
تعريف 0 ( ) ( ) ( ) st L f t F s f t e dt محبی محسن دکتر www.Mohebbii.ir
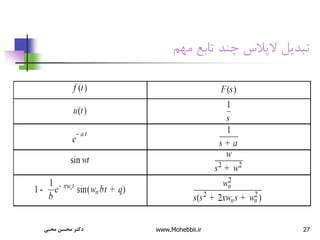
27.
27 مهم تابع چند
الپالس تبدیل محبی محسن دکتر www.Mohebbii.ir
28.
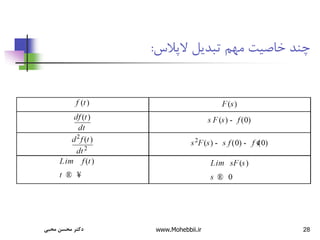
28 الپالس تبدیل مهم
خاصیت چند : محبی محسن دکتر www.Mohebbii.ir
29.
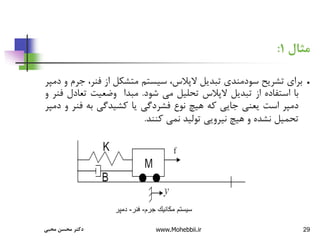
29 مثال 1 : . برای تشریح سودمندی تبدیل ،الپالس سیستم متشکل از ،فنر جرم و دمپر با استفاده از تبدیل الپالس تحلیل می شود . مبدا وضعیت تعاد ل فنر و دمپر است یعنی جایی که هیچ نوع فشردگی یا کشیدگی به فن ر و دمپر تحمیل نشده و هیچ نیرویی تولید نمی کنند . جرم مكانيك سيستم - فنر - دمپر محبی
محسن دکتر www.Mohebbii.ir
30.
30 مثال 1 : نیوتن دوم قانون
از استفاده با سیستم این کنندة توصیف معادالت صورت به رابطة ( 1 ) شود می نوشته : محبی محسن دکتر www.Mohebbii.ir
31.
31 هدف : است زمان از
تابعی صورت به سیستم پاسخ آوردن دست به . ف رض که کنید : محبی محسن دکتر www.Mohebbii.ir
32.
32 معادلة الپالس تبدیل ( 1 ) است
زیر صورت به ( جدول 2 ببینید را :) آید می دست به چنین حسب بر معادله این حل از : محبی محسن دکتر www.Mohebbii.ir
33.
33 مخرج ای جمله
چند های ریشه تعریف به بنا « قطب » ای جمله چند های ریشه و صورت « صفر » شوند می نامیده . فرض کنید باشد در این صورت معادلة ( 4 ) چنین می شود : محبی محسن دکتر www.Mohebbii.ir
34.
34 برای تبدیل به فرم های موجود در جدول 1 از گسترش کسرهای جزئی استفاده می شود : محبی محسن دکتر
www.Mohebbii.ir
35.
35 ضرایب که مادنه نامیده می ،شوند به سادگی قابل محاسبه اند ( از سمت راست معادلة ( 6 ) مخرج مشترك بگیرید و صورت رابطة حاصل را با صورت سمت مخرج راست رابطة ( 5 ) هم ارز قرار دهید ) : محبی محسن دکتر
www.Mohebbii.ir
36.
36 تبدیل عکس رابطة ( 7 ) با توجه به جدول 1 به صورت رابطة ( 8 ) قابل محاسبه است : محبی محسن دکتر
www.Mohebbii.ir
37.
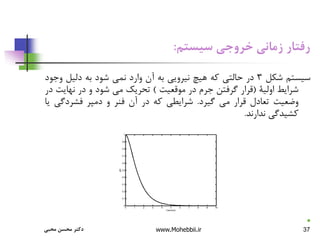
37 سیستم خروجی زمانی
رفتار : سیستم شکل 3 در حالتی که هیچ نیرویی به آن وارد نمی شود به دلیل وجو د شرایط اولیة ( قرار گرفتن جرم در موقعیت ) تحریک می شود و در نهای ت در وضعیت تعادل قرار می گیرد . شرایطی که در آن فنر و دمپر فشردگی یا کشیدگی ندارند . شكل 4 . مثال سيستم خروجي منحني 1 محبی محسن دکتر www.Mohebbii.ir
38.
38 2 - سیستم تبدیل تابع : نسبت
صورت به زمان با تغییرناپذیر خطی سیستم یک تبدیل تابع الپالس تبدیل ورودی متغیر الپالس تبدیل به خروجی متغیر ( شرا بودن صفر فرض با اولیه یط ) شود می تعریف . است نظر مورد سیستم دینامیک دهندة نشان سیستم تبدیل تابع . تاب تبدیل ع اطالعات هیچ و کند می بیان را سیستم رفتار از خروجی و ورودی توصیف از ی شود نمی شامل را سیستم درونی ساختار . محبی محسن دکتر www.Mohebbii.ir
39.
پزشكی در اطالعات
فنآوری کاربرد - کنترل 39 مثال 2 : تابع تبدیل سیستم جرم - فنر - دمپر توصیف شده در مثال 1 ، از روی معادله ( 1 ) و با صفر قرار دادن شرایط اولیه به صورت زیر به دست می آید : محبی محسن دکتر www.Mohebbii.ir
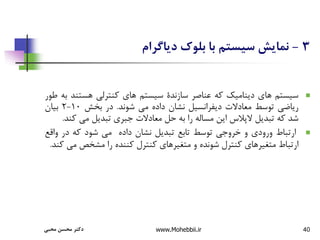
40.
40 3 - دیاگرام بلوك با
سیستم نمایش سیستم های دینامیک که عناصر سازندة سیستم های کنترلی هستند به طور ریاضی توسط معادالت دیفرانسیل نشان داده می شوند . در بخش 10 - 2 بیان شد که تبدیل الپالس این مساله را به حل معادالت جبری تبدیل می ک ند . ارتباط ورودی و خروجی توسط تابع تبدیل نشان داده می شود که در واق ع ارتباط متغیرهای کنترل شونده و متغیرهای کنترل کننده را مشخص م ی کند . محبی محسن دکتر www.Mohebbii.ir
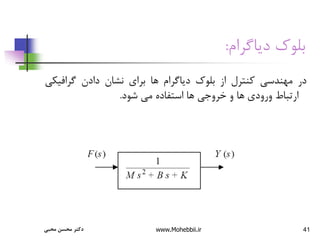
41.
41 دیاگرام بلوك : در مهندسی کنترل از بلوك دیاگرام ها برای نشان دادن گرافیک ی ارتباط ورودی ها و خروجی ها استفاده می شود . محبی محسن
دکتر www.Mohebbii.ir
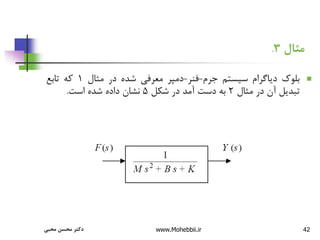
42.
42 مثال 3 . بلوك دیاگرام سیستم جرم - فنر - دمپر معرفی شده در مثال 1 که تابع تبدیل آن در مثال 2 به دست آمد در شکل 5 نشان داده شده است . شكل 5 . مثال سيستم دياگرامي
بلوك نمايش 1 محبی محسن دکتر www.Mohebbii.ir
43.
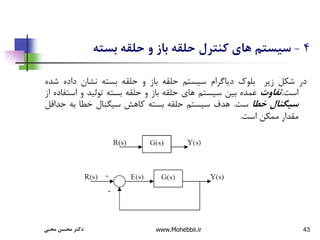
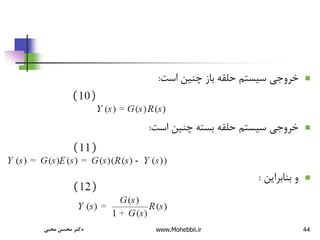
43 4 - بسته حلقه و
باز حلقه کنترل های سیستم در شکل زیر بلوك دیاگرام سیستم حلقه باز و حلقه بسته نشان داده ش ده است . تفاوت عمده بین سیستم های حلقه باز و حلقه بسته تولید و اس تفاده از سیگنال خطا ست . هدف سیستم حلقه بسته کاهش سیگنال خطا به ح داقل مقدار ممکن است . محبی محسن دکتر www.Mohebbii.ir
44.
44 است چنین باز
حلقه سیستم خروجی : است چنین بسته حلقه سیستم خروجی : بنابراین و : محبی محسن دکتر www.Mohebbii.ir
45.
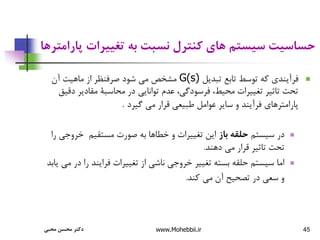
45 پ تغییرات به
نسبت کنترل های سیستم حساسیت ارامترها تبدیل تابع توسط که فرآیندی G(s) آن ماهیت از صرفنظر شود می مشخص مقادیر محاسبة در توانایی عدم ،فرسودگی ،محیط تغییرات تاثیر تحت دقیق گیرد می قرار طبیعی عوامل سایر و فرآیند پارامترهای . سیستم در باز حلقه خروج مستقیم صورت به خطاها و تغییرات این را ی دهند می قرار تاثیر تحت . د را فرایند تغییرات از ناشی خروجی تغییر بسته حلقه سیستم اما یابد می ر کند می آن تصحیح در سعی و . محبی محسن دکتر www.Mohebbii.ir
46.
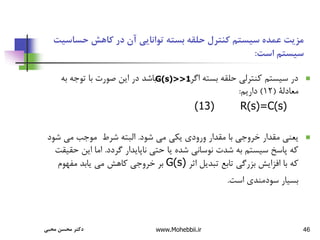
46 حساس کاهش در
آن توانایی بسته حلقه کنترل سیستم عمده مزیت یت است سیستم : تو با صورت این در باشد اگر بسته حلقه کنترلی سیستم در به جه معادلة ( 12 ) داریم : R(s)=C(s) (13) شود می یکی ورودی مقدار با خروجی مقدار یعنی . ش می موجب شرط البته ود گردد ناپایدار حتی یا شده نوسانی شدت به سیستم پاسخ که . این اما حقیقت اثر تبدیل تابع بزرگی افزایش با که G(s) مفهوم یابد می کاهش خروجی بر است سودمندی بسیار . G(s)>>1 محبی محسن دکتر www.Mohebbii.ir
47.
محبی محسن دکتر
www.Mohebbii.ir 47 بس حلقه کنترل سیستم در نویز و اغتشاش ته : اغلب سیستم های کنترل تحت تاثیر سیگنال های اغتشاش بیرون ی قرار می گیرند که در نتیجه بر روی خروجی اثر نامطلوب می گذارد . برای مثال در سیستم کنترل جهت یک آنتن ماهواره ای وزش باد ، اغتشاش ناخواست ه است . نویزی که در اکثر سیستم های کنترلی حلقه بسته به وجود م ی آید نویز ایجاد شده توسط سنسور اندازه گیری است . سیستم های حلقه ب سته این قابلیت مهم را دارند که اثر اغتشاش و عوامل ناخواستة بیرونی را ک اهش دهند .
48.
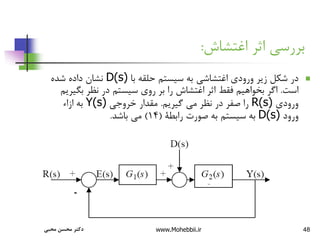
48 اثر بررسی اغتشاش : با حلقه
سیستم به اغتشاشی ورودی زیر شکل در D(s) شده داده نشان است . بگ نظر در سیستم روی بر را اغتشاش اثر فقط بخواهیم اگر یریم ورودی R(s) گیریم می نظر در صفر را . خروجی مقدار Y(s) ازاء به ورود D(s) رابطة صورت به سیستم به ( 14 ) باشد می . محبی محسن دکتر www.Mohebbii.ir
49.
49 G1(s)G2(s)>>1 حال اگر و ،باشد با توجه به رابطة ( 14 ) اثر اغتشاش در خروجی بسیار کوچک می شود . محبی محسن
دکتر www.Mohebbii.ir
50.
50 دائمی حالت خطای نکتة مهمی که در مورد سیستم های کنترل باید مورد بررسی قرار گیرد میزان خطای نهایی سیستم ( اختالف خروجی مطلوب و مو جود در حالت دائمی ) است . خطای سیستم حلقه بسته شکل 6 به صورت زیر است : محبی
محسن دکتر www.Mohebbii.ir
51.
51 جدول خواص به
توجه با 1 زیر صورت به پله ورودی ازاء به خطای نهایی مقدار است : مقدار که شد خواهد نزدیک صفر به دائمی حالت خطای مقدار شرطی به باشد بزرگ . شکل باز حلقه سیستم برای 6 رابطة صورت به خطا ( 17 ) است : محبی محسن دکتر www.Mohebbii.ir
52.
52 جدول به توجه
با باز حلقه سیستم دائمی حالت خطای پله ورودی ازاء به 1 به است زیر صورت : با تنظیم سیستم کنترل حلقه باز می تواند به ازاء ورودی پله خطای ح الت دائمی صفر داشته باشد البته این موضوع به شرطی صادق است که پارا مترهای سیستم در عمل تغییر نکنند . محبی محسن دکتر www.Mohebbii.ir
53.
53 بسته حلقه سیستم
معایب استفاده از فیدبک در سیستم کنترل باعث کاهش تاثیر تغییر پارامتر های سیستم می ،شود اثر اغتشاشات و نویز را در خروجی سیستم کم می ،کند می توان د پاسخ گذرای سیستم را بهبود بخشد و منجر به کاهش خطای حالت دائمی شود . با این وجود استفاده از مزایا سیستم حلقه بسته هزینه هایی را هم به همراه خ واهد داشت . نخست اینکه تعداد اجزاء بکار رفته برای کنترل افزایش یافته و پیچیدگی روند کنترل بیشتر می شود . استفاده از سنسورها برای حال ت حلقه بسته ضروری است که خود سنسور می تواند عامل نویز باشد . مهمترین م وضوع در سیستم حلقه ،بسته امکان پیدایش ناپایداری است . محبی محسن دکتر www.Mohebbii.ir
54.
54 کنترل سیستم عملكرد
های مشخصه : توانایی تنظیم عملکرد گذرا و حالت دائمی یکی از مزایای عمدة سیستم ه ای کنترل حلقه بسته است . برای تحلیل و طرح سیستم های کنترل بای د مشخصه های عملکرد سیستم کنترل را تعریف و آنها کمی کنیم . با توجه به ای نکه سیستم های کنترل اغلب دینامیک ،هستند عملکرد سیستم ًالمعمو ب ر حسب پاسخ زمانی و خطای حالت دائمی برای یک سیگنال ورودی خاص مشخص م ی شوند . محبی محسن دکتر www.Mohebbii.ir
55.
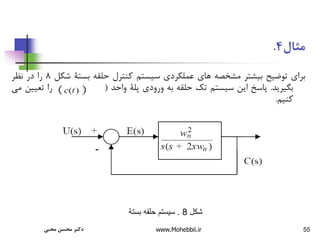
55 مثال 4 . برای توضیح بیشتر مشخصه های عملکردی سیستم کنترل حلقه بستة شکل 8 را در نظر بگیرید . پاسخ این سیستم تک حلقه به ورودی پلة واحد ( ) را تعیین می کنیم . شكل 8 . بستة حلقه سيستم محبی
محسن دکتر www.Mohebbii.ir
56.
56 رابطة صورت به
بسته حلقه خروجی ( 19 ) است : رابطة صورت به متناظر گذرای خروجی ، الپالس تبدیل جدول به باتوجه ( 20 ) دست به آید می : محبی محسن دکتر www.Mohebbii.ir
57.
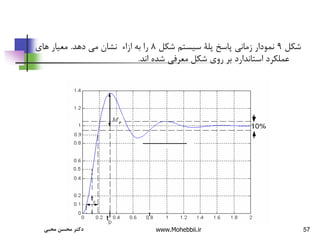
57 شکل 9 شکل سیستم پلة
پاسخ زمانی نمودار 8 دهد می نشان ازاء به را . های معیار اند شده معرفی شکل روی بر استاندارد عملکرد . محبی محسن دکتر www.Mohebbii.ir
58.
58 * زمان خیز (Rise Time) Tr مدت زمانی است که در طی آن پاسخ برای اولین بار به مقدار نهایی می رسد . * زمان اوج Tp (Peak
Time) مدت زمانی است که پاسخ به حداکثر مقدار خود می رسد . * زمان استقرار Ts (settling Time) مدت زمانی است که در طی آن پاسخ در 10 % مقدار نهایی خود مستقر می شود . * فراجهش Mp (Over shoot) اختالف حداکثر مقدار پاسخ با مقدار نهایی پاسخ است محبی محسن دکتر www.Mohebbii.ir
59.
59 سازی جبران : یک سیستم کنترل مناسب باید پایدار باشد و برای فرمان های ورودی به پاسخ های قابل قبولی منجر ،شود در برابر تغییرات پارامتری حساسیت کمی داشته ،باشد اثرات اغتشاشات نامطلوب را حذف کند و خطای حالت دائمی آن کم باشد . در برخی سیستم ها می توان پارامترهای موجود را چنان تنظیم کرد که پ اسخ مطلوب به دست آید . این کار در مورد همة سیستم ها ممکن نیست . یعنی در اغلب ،موارد امکان تنظیم دلخواه پارامترهای سیستم موجود برای رسیدن به مشخصه های ع ملکرد مطلوب وجود ندارد . محبی محسن
دکتر www.Mohebbii.ir
60.
60 سازی جبران : بنابراین طرح و ساختار سیستم تغییر داده می شود به این ترتیب که یک یا چند جزء اضافی درون ساختار حلقه بسته قرار داده می شود . این جزء اضافی نقص های عملکرد کلی سیستم را جبران یا متعادل می کند . دستگاه جبران کننده ممکن است ،الکتریکی مکانیکی یا سایر انواع دست گاه ها باشد و اغلب جبران کننده نامیده می شود و در محل مناسبی درون حلقه قرار داده می ش ود که نوع متداول آن جبران کنندة متوالی است که درست قبل از سیستم کنت رل شونده قرار می گیرد محبی محسن
دکتر www.Mohebbii.ir
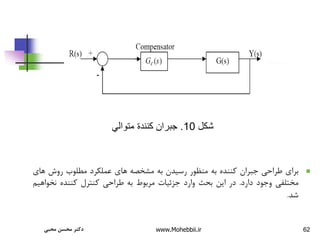
61.
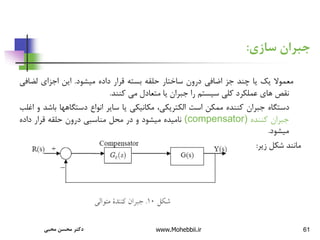
61 سازی جبران : معموال یک یا چند جز اضافی درون ساختار حلقه بسته قرار داده میشود . این اجزای لض افی نقص های عملکرد کلی سیستم را جبران یا متعادل می کنند . دستگاه جبران کننده ممکن است ،الکتریکی مکانیکی یا سایر انواع دستگاهها ب اشد و اغلب جبران کننده (compensator) نامیده میشود و در محل مناسبی درون حلقه قرار داده میشود . مانند شکل زیر : محبی محسن
دکتر www.Mohebbii.ir
62.
62 شكل 10 . متوالي كنندة جبران برای طراحی جبران کننده به منظور رسیدن به مشخصه های عملکرد مطلوب روش های مختلفی وجود دارد . در این بحث وارد جزئیات مربوط به طراحی کنترل کننده نخواهی م شد . محبی
محسن دکتر www.Mohebbii.ir
63.
63 تشكر با
Download



![11
مشخصه معادله
:
Characteristic Equation
مخرج
تابع
تبدیل
سیستم
کنترل
را
معادله
مشخصه
مینامند
.
همین
معادله
است
که
در
بحث
پایداری
در
سیستم
های
کنترل
بسیار
مورد
استفاده
قرار
میگی
رد
.
Y(s)=G(s)E(s)
E(s)=U(s)-H(s)Y(s)
Y(s)=G(s)[U(s)-H(s)Y(s)]
Y(s)=G(s)U(s)-G(s)H(s)Y(s) Y(s)[1+G(s)H(s)]=G(s)U(s)
System transfer function =Y(s)/U(s) =G(s)/[1+G(s)H(s)]
System characteristic equation= 1+ G(s)H(s)
محبی محسن دکتر www.Mohebbii.ir](https://image.slidesharecdn.com/random-231027194651-a321ff73/85/pdf-11-320.jpg)