Download to read offline

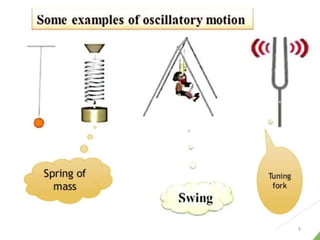
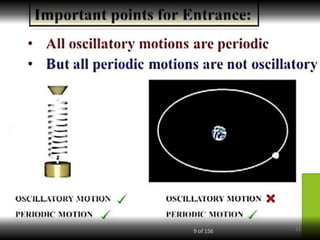
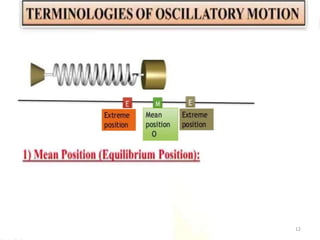
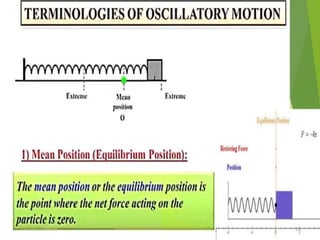
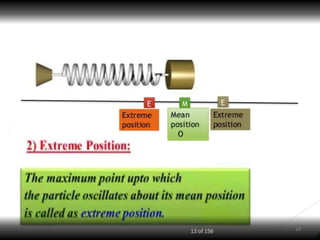
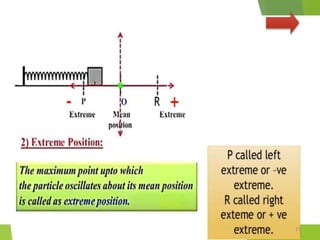
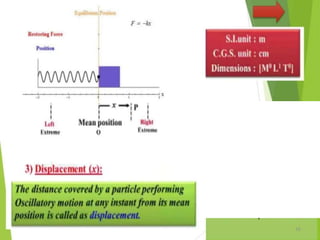
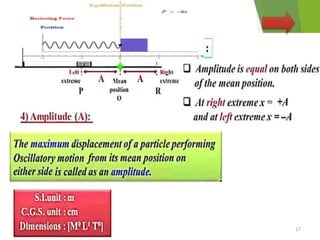
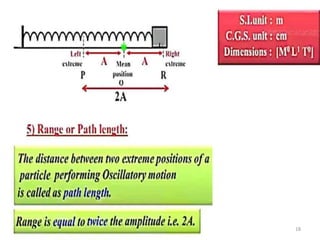
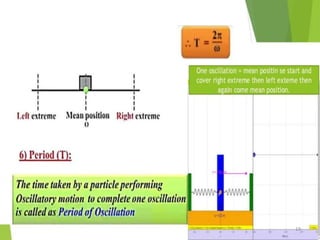
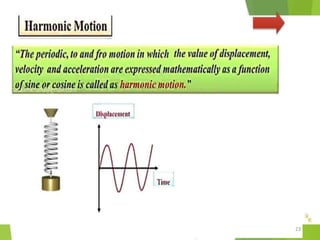
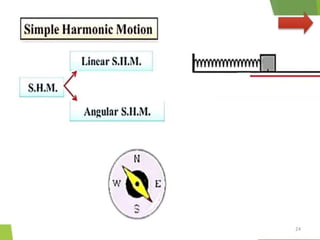
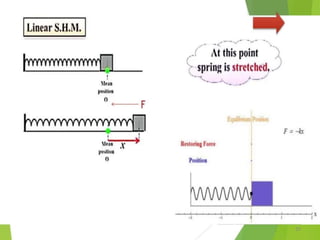
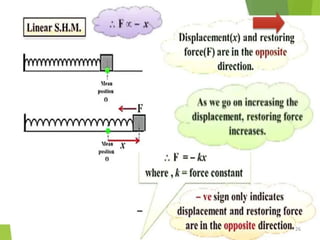
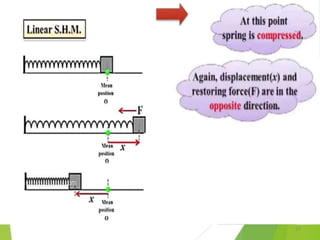
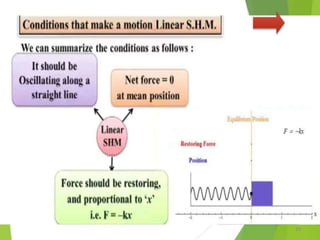
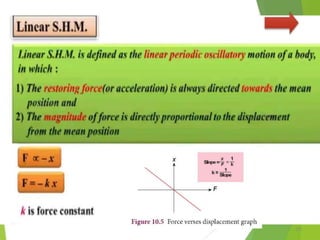
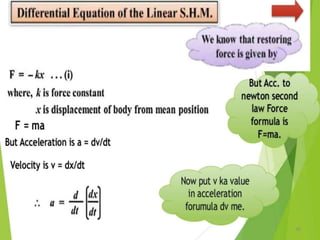
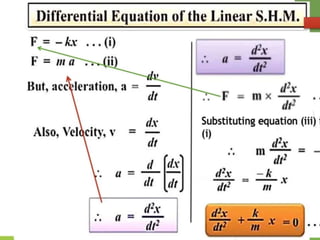
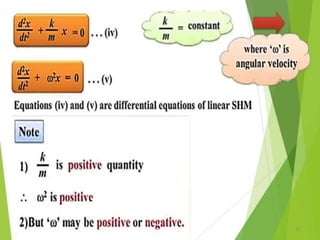
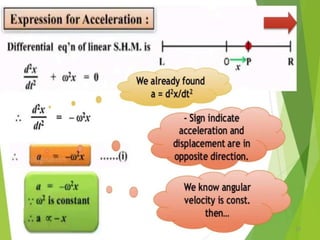
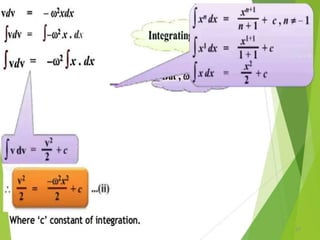
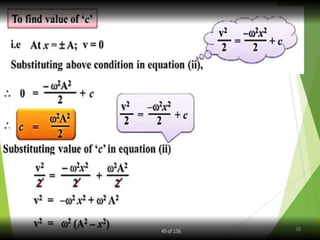
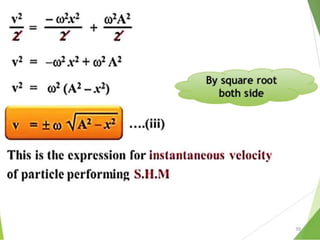
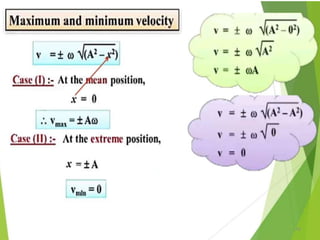
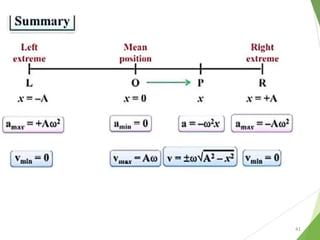
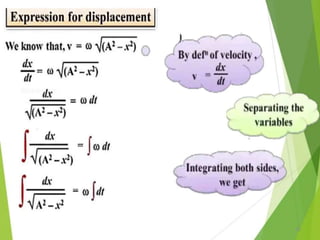
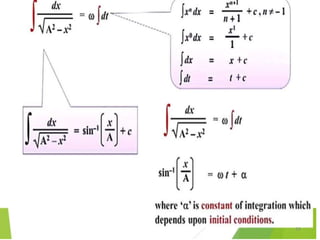
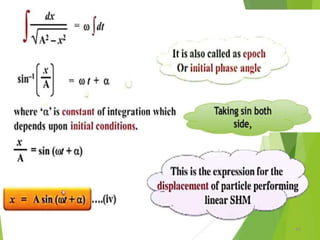
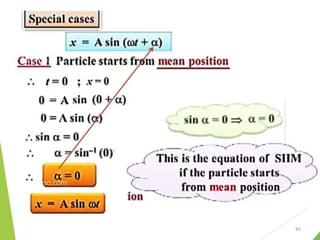
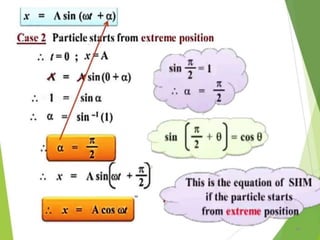
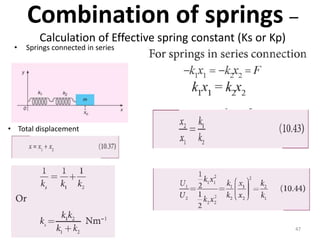
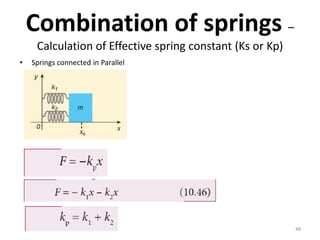
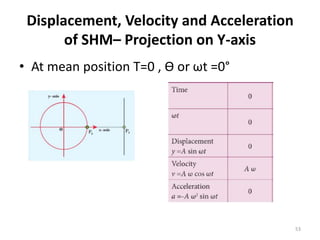
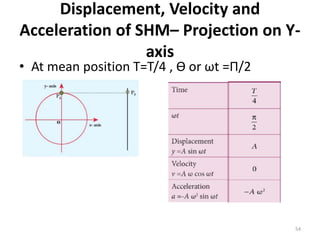
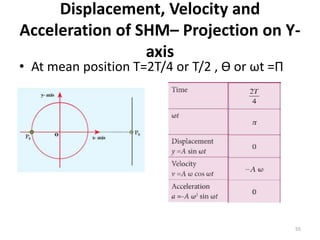
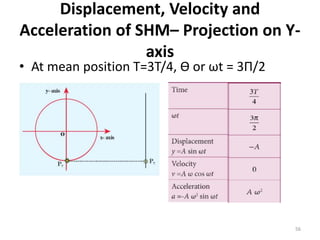
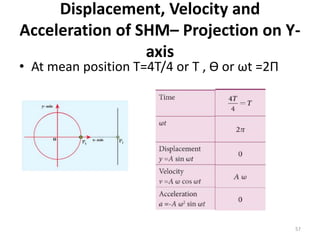
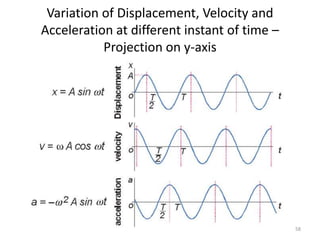
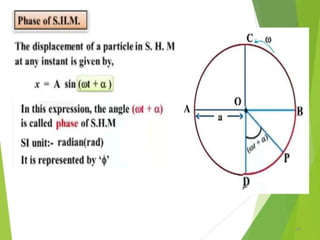
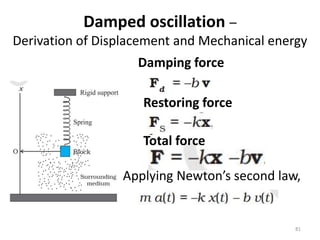
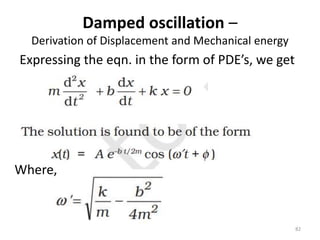
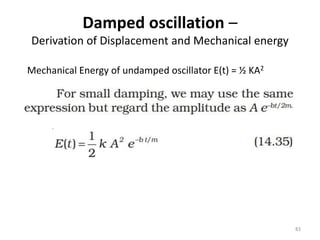


This document discusses oscillations, including different types of motion like simple harmonic motion. It covers topics such as periodic motion, terminologies, linear and angular simple harmonic motion, energies in SHM, examples of SHM like a spring and pendulum, and equations of motion. It also discusses free oscillations, damped oscillations, and forced oscillations, specifically resonance. Forces, displacements, velocities, and accelerations of SHM are examined. Combinations of springs and their effective spring constants are analyzed.



































































