5.VLANやHDDの設定とMODULEの読み込み
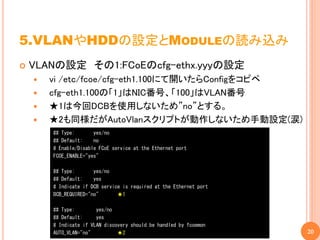
VLANの設定 その1:FCoEのcfg-ethx.yyyの設定
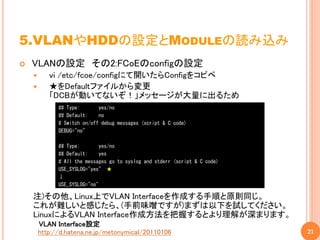
vi /etc/fcoe/cfg-eth1.100にて開いたらConfigをコピペ
cfg-eth1.100の「1」はNIC番号、「100」はVLAN番号
★1は今回DCBを使用しないため”no”とする。
★2も同様だがAutoVlanスクリプトが動作しないため手動設定(涙)
## Type: yes/no
## Default: no
# Enable/Disable FCoE service at the Ethernet port
FCOE_ENABLE="yes"
## Type: yes/no
## Default: yes
# Indicate if DCB service is required at the Ethernet port
DCB_REQUIRED="no" ★1
## Type: yes/no
## Default: yes
# Indicate if VLAN discovery should be handled by fcoemon
AUTO_VLAN="no" ★2 20
21.
5.VLANやHDDの設定とMODULEの読み込み
VLANの設定 その2:FCoEのconfigの設定
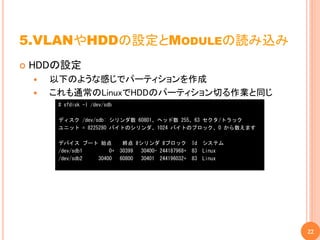
vi /etc/fcoe/configにて開いたらConfigをコピペ
★をDefaultファイルから変更
「DCBが動いてないぞ!」メッセージが大量に出るため
## Type: yes/no
## Default: no
# Switch on/off debug messages (script & C code)
DEBUG="no"
## Type: yes/no
## Default: yes
# All the messages go to syslog and stderr (script & C code)
USE_SYSLOG="yes" ★
↓
USE_SYSLOG="no"
注)その他、Linux上でVLAN Interfaceを作成する手順と原則同じ。
これが難しいと感じたら、(手前味噌ですが)まずは以下を試してください。
LinuxによるVLAN Interface作成方法を把握するとより理解が深まります。
VLAN Interface設定
http://d.hatena.ne.jp/metonymical/20110106 21
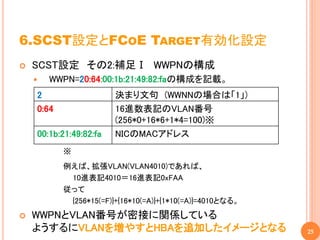
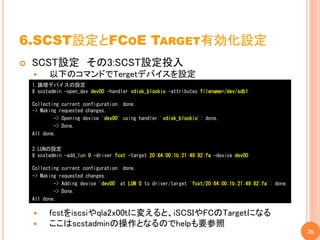
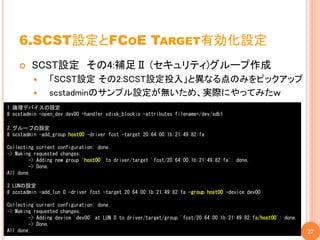
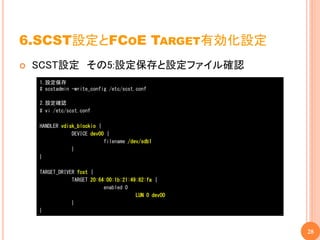
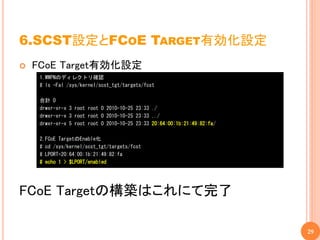
6.SCST設定とFCOE TARGET有効化設定
SCST設定 その1:Module読み込み
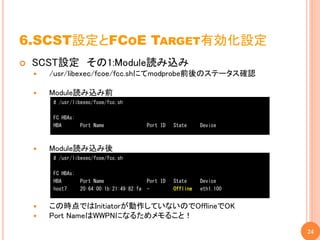
/usr/libexec/fcoe/fcc.shにてmodprobe前後のステータス確認
Module読み込み前
# /usr/libexec/fcoe/fcc.sh
FC HBAs:
HBA Port Name Port ID State Device
Module読み込み後
# /usr/libexec/fcoe/fcc.sh
FC HBAs:
HBA Port Name Port ID State Device
host7 20:64:00:1b:21:49:82:fa - Offline eth1.100
この時点ではInitiatorが動作していないのでOfflineでOK
Port NameはWWPNになるためメモること!
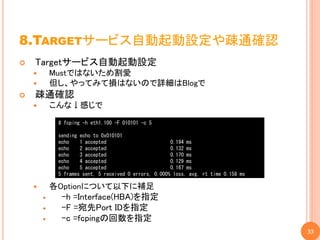
24