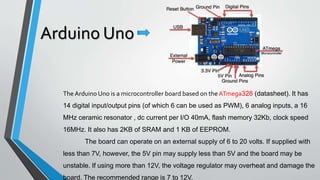
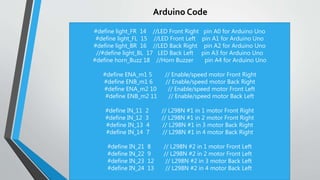
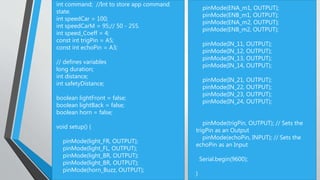
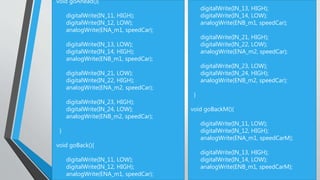
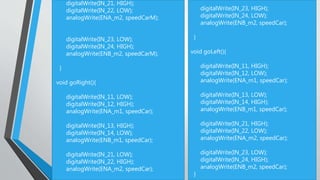
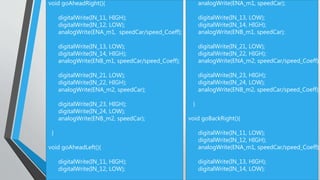
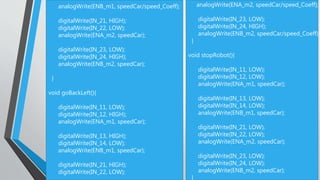
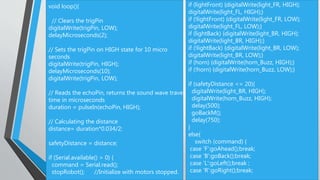
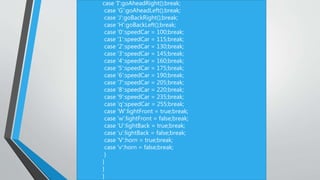
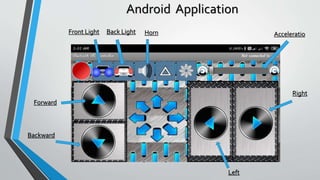
The document details a robotic car project that is remotely controlled via Bluetooth and is capable of obstacle avoidance. It includes descriptions of the hardware components used, such as the Arduino Uno, ultrasonic sensor, and motor driver, along with their functionalities. Additionally, it provides an overview of the Arduino code responsible for controlling the car's movements and responses to various commands.