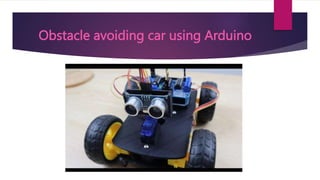
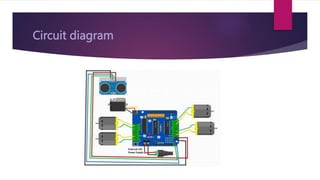
This document summarizes a student project to build an obstacle avoiding car using an Arduino microcontroller. The car uses an ultrasonic sensor to detect obstacles in its path and changes direction to avoid collisions. It consists of an Arduino Uno, motor driver, ultrasonic sensor, DC motors, and power supply. When an obstacle is detected, the ultrasonic sensor measures the distance and sends a signal to the microcontroller, which then controls the motors to divert the car around the obstacle. Potential applications include mining vehicles, driverless transport systems, and autonomous cleaning robots. The project provides an opportunity to develop mechanical and electronics skills while gaining experience in robot construction.









































![Polymer [ बहुलक ] Chemistry Notes PDF - Irfanullah Mehar - JJ Sir Chemistry.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/polymerchemistrynotespdf-irfanullahmehar-jjsirchemistry-260210172118-3f9b37f7-thumbnail.jpg?width=640&height=640&fit=bounds)










