
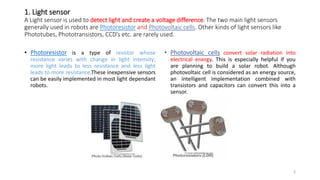
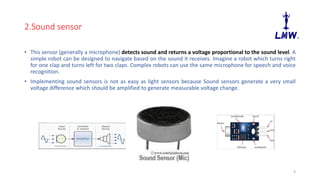






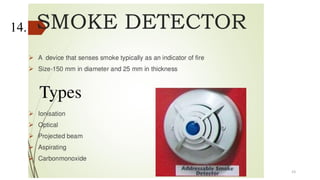
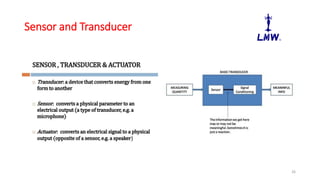


A sensor is a device that detects and responds to some type of input from the physical environment. Common sensors include light sensors, sound sensors, contact sensors, tilt sensors, distance sensors, proximity sensors, navigation sensors, acceleration sensors, chemical sensors, and biosensors. Each sensor detects a specific type of input or environmental phenomenon and outputs a signal that can be read or processed.