Downloaded 10 times

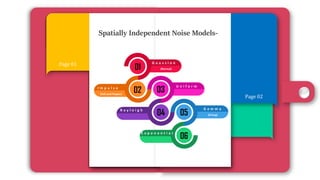

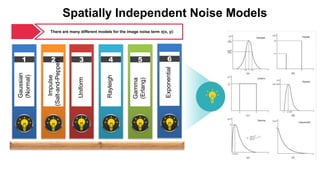
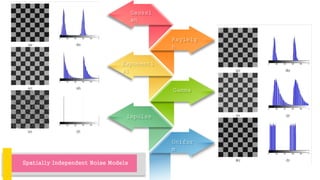
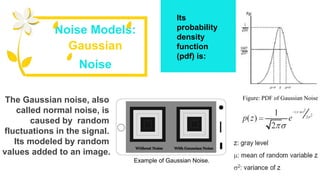
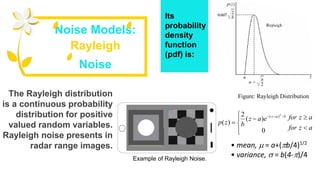
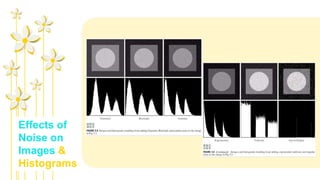



1) The document discusses various types of noise models that can affect digital images, including spatially independent noise models like Gaussian, impulse, uniform, Rayleigh, gamma, and exponential noise. 2) Spatially dependent noise models include periodic noise, which can be reduced via frequency domain filtering. 3) The parameters of different noise models can be estimated from small patches of images, by acquiring images of a flat surface under uniform lighting, or from the Fourier spectrum of periodic noise. Understanding noise models is important for image denoising.