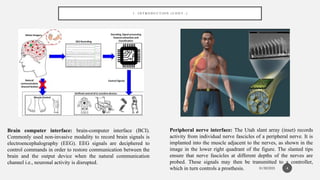
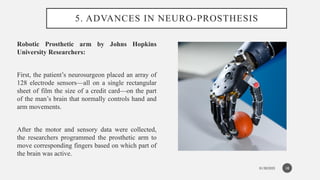
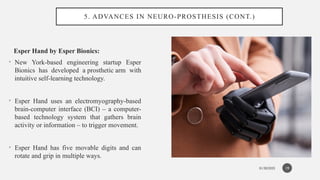
The document discusses neuro-electric prostheses and brain-machine interfaces (BMIs), detailing various neural interfaces including brain-computer interfaces, peripheral nerve interfaces, and targeted muscle reinnervation to control prosthetic devices. It outlines the signal processing involved in BMIs, such as filtering, amplifying, and digitizing neural signals, and describes advancements in neuro-prostheses that leverage these technologies for improved functionality. Additionally, the document introduces key examples of prosthetic innovations, including robotic arms and the Esper hand, which use advanced algorithms to respond to neural commands.