
Recommended
Recommended
More Related Content
What's hot
What's hot (20)
Viewers also liked
Viewers also liked (17)
Similar to MPC
Similar to MPC (20)
Recently uploaded
Recently uploaded (20)
MPC
- 2. CONTENTS • Advantages & Drawbacks • MPC Concept • Terminology • Applications • Prediction Models • State Space Model • Optimization Window • Closed-loop Control System • State Estimate Predictive Control • Constraints • Numerical Solutions 2Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 3. MPC ADVANTAGES • Very intuitive concepts • Relatively easy tuning • Requires little computation • Control a great variety of processes • The multivariable case can easily be dealt with • The treatment of constraints is conceptually simple • Very useful when future references (robotics or batch processes) are known 3Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 4. MPC DRAWBACKS • Derivation of control law is more complex than the classical PID • In adaptive control case all computation has to be carried out at every sampling time • Need for an appropriate model of the process to be available 4Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 5. MPC CONCEPT ANALOGYTOCHESS I (Controller) Opponent (Plant) My move Opponent’s move New State 5Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
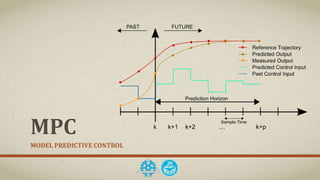
- 6. MPC TERMINOLOGY • Moving horizon window • Prediction horizon • Receding horizon control • The information at time ti in order to predict the future is denoted as x(ti) • Cost function is denoted as J 6Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 7. APPLICATIONS Chemical Process Control more than 4500 different chemical processes area-wide application 7Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 8. APPLICATIONS Variable-pitch wind turbines stochastic uncertainty fatigue constraints 8Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 9. APPLICATIONS Autonomous racing reference tracking short sampling intervals 9Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 10. PREDICTION MODELS Models Linear Non- Linear Discrete Continuous 10Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 11. STATE SPACE MODEL 𝑥 𝑚 𝑘 + 1 = 𝐴 𝑚 𝑥 𝑚 𝑘 + 𝐵 𝑚 𝑢 𝑘 𝑦 𝑘 = 𝐶 𝑚 𝑥 𝑚 𝑘 𝑥 𝑚 𝑘 + 1 − 𝑥 𝑚 𝑘 = 𝐴 𝑚(𝑥 𝑚 𝑘 − 𝑥 𝑚 𝑘 − 1 ) + 𝐵 𝑚(𝑢 𝑘 − 𝑢 𝑘 − 1 ) Δxm(k + 1) = AmΔxm(k) + BmΔu(k) y(k + 1) − y(k) = Cm(xm(k + 1) − xm(k)) = CmΔxm(k + 1) 11Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering = CmAmΔxm(k) + CmBmΔu(k)
- 12. STATE SPACE MODEL Δxm(k + 1) 𝑦(𝑘+1) = 𝐴 𝑚 𝑂 𝑚 𝑇 𝐶 𝑚 𝐴 𝑚 1 Δxm(k) 𝑦(𝑘) + Bm 𝐶 𝑚 𝐵 𝑚 Δu(k) 𝑦 𝑘 = 𝑂 𝑚 1 Δxm(k) 𝑦(𝑘) 𝑥 𝑘 + 1 𝑥 𝑘𝐴 𝐵 𝐶 𝑂 𝑚 =zeros(n1,1) 12Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 13. MATLAB EXAMPLE 1 13Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 14. PREDICTIVE CONTROL WITHIN ONE OPTIMIZATION WINDOW • Current Time: ki • Prediction horizon (Np): Number of prediction samples • Control horizon (Nc): dictating number of parameters used to capture the future control trajectory 14Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 15. PREDICTIVE CONTROL WITHIN ONE OPTIMIZATION WINDOW 15Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 16. PREDICTION OF STATE AND OUTPUT VARIABLES x(ki + 1 | ki) = Ax(ki) + BΔu(ki) x(ki + 2 | ki) = Ax(ki+1|ki) + BΔu(ki+1) = A2x(ki) + ABΔu(ki) + BΔu(ki+1) ⋮ ⋮ x(ki + Np | ki) = ANpx(ki) + ANp-1BΔu(ki) + ANp-2BΔu(ki+1)+... + ANp-NcBΔu(ki+Nc-1) 16Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 17. PREDICTION OF STATE AND OUTPUT VARIABLES y(ki+1|ki) = CAx(ki) + CBΔu(ki) y(ki+2|ki) = CA2x(ki) + CABΔu(ki) + CBΔu(ki+1) ⋮ ⋮ y(ki+Np|ki) = CANpx(ki) + CANp-1BΔu(ki) + CANp-2BΔu(ki+1)+ . . . + CANp-NcBΔu(ki+Nc-1) 17Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 18. PREDICTION OF STATE AND OUTPUT VARIABLES 𝑌 = 𝑦(𝑘𝑖 + 1|𝑘𝑖) 𝑦(𝑘𝑖 + 2|𝑘𝑖) 𝑦(𝑘𝑖 + 3|𝑘𝑖) ⋮ 𝑦(𝑘𝑖 + 𝑁 𝑝|𝑘𝑖) , 𝑈 = 𝛥𝑢(𝑘𝑖) 𝛥𝑢(𝑘𝑖 + 1) 𝛥𝑢(𝑘𝑖 + 2) ⋮ 𝛥𝑢(𝑘𝑖 + 𝑁𝑐 − 1) 18Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 19. PREDICTION OF STATE AND OUTPUT VARIABLES 19Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 20. OPTIMIZATION Cost function 𝑅 𝑠 = 𝑜𝑛𝑒𝑠 𝑁 𝑝 , 1 ∗ 𝑟 𝑘𝑖 = 𝑅 𝑠 𝑟 𝑘𝑖 𝑅 = 𝑟 𝜔 𝐼 𝑁 𝑐×𝑁𝑐 (𝑟 𝜔 ≥ 0) 20Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering • First term is linked to the objective of minimizing the errors between the predicted output and the set-point signal. • Second term reflects the consideration given to impact of ΔU when the objective function J is made to be as small as possible.
- 21. OPTIMIZATION Hessian matrix 21Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 22. MATLAB EXAMPLE 2 22Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 23. CLOSED-LOOP CONTROL SYSTEM 23Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 24. BLOCK DIAGRAM OF DISCRETE-TIME PREDICTIVE CONTROL SYSTEM 24Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 25. STATE ESTIMATE PREDICTIVE CONTROL 25Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 26. MPC DESIGN WITH CONSTRAINTS 26Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering With sampling interval Δt = 0.1
- 27. MPC DESIGN WITH CONSTRAINTS 27Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering The prediction horizon Np = 10 and the control horizon Nc = 3. There is no weight on the control signal, i.e., 𝑅 = 0. Examine what happens if the control amplitude is limited to ±25 by saturation.
- 28. MPC DESIGN WITH CONSTRAINTS CASE A. WITHOUT CONTROL SATURATION 28Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 29. MPC DESIGN WITH CONSTRAINTS CASE B. WITH CONTROL SATURATION 29Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 30. MPC DESIGN WITH CONSTRAINTS CASE C. WITH MODIFIED CONTROL SATURATION 30Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 31. MPC DESIGN WITH CONSTRAINTS CASE C. WITH MODIFIED CONTROL SATURATION 31Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 32. MPC DESIGN WITH CONSTRAINTS CASE COMPARISON 32Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering
- 33. FREQUENTLY USED OPERATIONAL CONSTRAINTS Control Variable Incremental Variation • These are hard constraints on the size of the control signal movements, i.e., on the rate of change of the control variables (Δu(k)) Amplitude of the Control Variable • These are the most commonly encountered constraints among all constraint types. • These are the physical hard constraints on the system. Output Constraints • Output constraints are often implemented as ‘soft’ constraints. • Output constraints often cause large changes in both the control and incremental control variables when they are enforced. Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering 33
- 34. NUMERICAL SOLUTIONS USING QUADRATIC PROGRAMMING Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering 34 Quadratic Programming Inequality Constraints Equality Constraints
- 35. QUADRATIC PROGRAMMING FOR EQUALITY CONSTRAINTS Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering 35
- 36. QUADRATIC PROGRAMMING FOR EQUALITY CONSTRAINTS Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering 36 𝑥1 = 0.5 → 𝑥2 = 1 − 𝑥1 = 0.5
- 37. LAGRANGE MULTIPLIERS Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering 37 Constraint equation: 𝑀𝑥 = 𝛾 The procedure of minimization is to take the first partial derivatives with respect to the vectors x and λ, and then equate these derivatives to zero:
- 38. LAGRANGE MULTIPLIERS EXAMPLE Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering 38
- 39. LAGRANGE MULTIPLIERS EXAMPLE Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering 39
- 40. ACTIVE SET METHOD Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering 40 λi ≥ 0 λi < 0 The point is a local solution The objective function value can be decreased by relaxing the constraint i
- 41. Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering 41 MINIMIZATION WITH INEQUALITY CONSTRAINTS EXAMPLE
- 42. Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering 42 Clearly the third element in λ is negative, therefore, the third constraint is an inactive constraint and will be dropped from the constrained equation λ = 5 3 → x = 0.3333 1.3333 −0.6667 MINIMIZATION WITH INEQUALITY CONSTRAINTS EXAMPLE Inactive constraint Inactive constraint
- 43. REFERENCES 1. Model Predictive Control System Design and Implementation Using MATLAB, Liuping Wang 2. Model Predictive Control, 2nd edition, E.F. Camacho 3. A Lecture on Model Predictive Control, Jay H. Lee 4. Model Predictive Control: Basic Concepts, A. Bemporad 5. Lecture 14 - Model Predictive Control Part 1: The Concept, Gorinevsky 6. Principles of Optimal Control, Lecture 16 Model Predictive Control 7. Model Predictive Control, 4 Lectures 2016, Mark Cannon 8. Model Predictive Control, S. Boyd
- 44. PRESENTED BYThanks for your attention! Pooyan Nayyeri Faraz AbedAzad Model Predictive Control/Dec 2016/University of Tehran/School of Mechanical Engineering 44