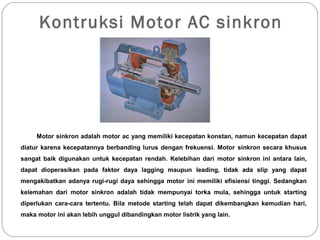
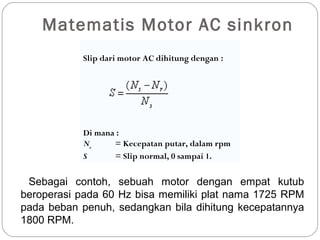
Motor sinkron adalah motor AC yang bekerja pada kecepatan tetap pada sistim frekuensi tertentu. Motor ini memerlukan arus searah untuk pembangkitan daya dan memiliki tork awal yang rendah, sehingga cocok untuk penggunaan awal dengan beban rendah. Motor sinkron mampu memperbaiki faktor daya sistim.