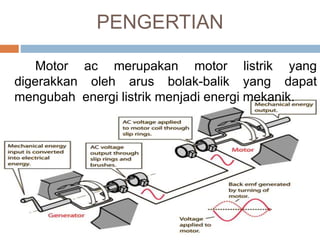
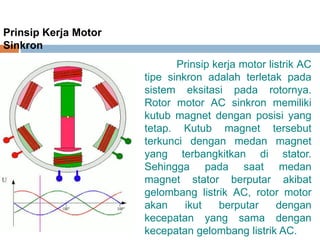
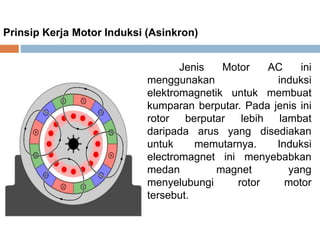
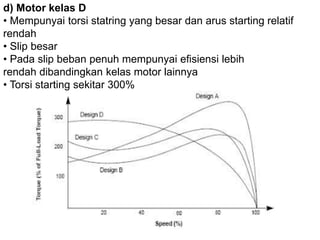
Dokumen tersebut merangkum pengertian, jenis, prinsip kerja, karakteristik, rugi-rugi, dan paralel motor AC. Motor AC terdiri dari motor sinkron dan induksi. Motor sinkron berputar sesuai frekuensi tegangan sedangkan induksi berputar lebih lambat. Karakteristik motor induksi dibedakan menjadi kelas A, B, C, dan D berdasarkan torsi dan arus startingnya. Rugi pada motor antara lain rugi tembaga dan bes