Download to read offline
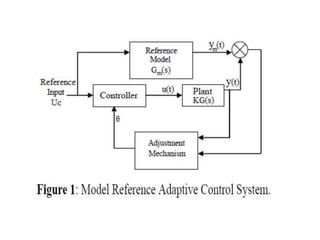
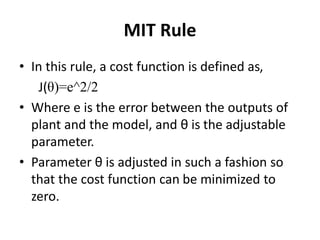
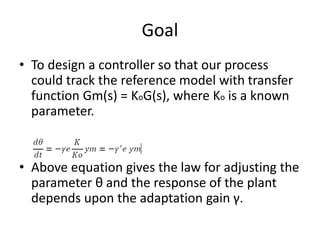
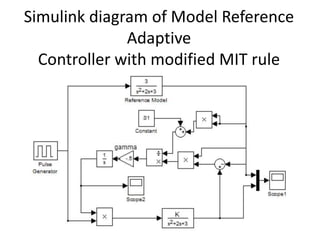


This document summarizes a student's simulation of an adaptive control system using model reference adaptive control (MRAC) and the MIT rule. The simulation aims to design an adaptive controller so that a plant's output tracks the output of a reference model. The MIT rule is used to minimize the error between the plant and model outputs by adjusting the controller parameters. A Simulink model is created to test the adaptive controller on a second order system using different adaptation gains to analyze the system response. The conclusion examines how the adaptation gain affects the response speed and overshoot.