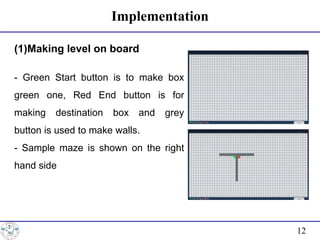
This document describes a web-based application called "Path Finding Visualizer" that visualizes shortest path algorithms like Dijkstra's algorithm and A* algorithm. It discusses the motivation, objectives and implementation of the project. The implementation involves creating a graph from a maze, building an adjacency matrix to represent the graph, and applying Dijkstra's algorithm to find the shortest path between nodes. Screenshots show the visualization of Dijkstra's algorithm finding the shortest path between a source and destination node. The technologies used include Visual Studio Code. The project aims to help users better understand how shortest path algorithms work through visualization.
![CricScorer
Department of Information Technology
Aldel Education Trust’s
St. John College of Engineering and Management, Palghar
NAAC Accredited with Grade A (2017-2022)
SHORTEST PATH VISUALIZER
KAVISH GHAG [EU1214032]
HARDIK PAWAR [EU1214036]
AKANSH SINGH [EU1214050]
KUNAL GAIKWAD [EU1214051]
DR. ARUN SAXENA| Project Guide
November 5, 2022
1](https://image.slidesharecdn.com/miniprojectshortestpathvisualizer-221116140955-b96e527e/85/mini-project_shortest-path-visualizer-pptx-1-320.jpg)
![CricScorer
Department of Information Technology
Aldel Education Trust’s
St. John College of Engineering and Management, Palghar
NAAC Accredited with Grade A (2017-2022)
SHORTEST PATH VISUALIZER
KAVISH GHAG [EU1214032]
HARDIK PAWAR [EU1214036]
AKANSH SINGH [EU1214050]
KUNAL GAIKWAD [EU1214051]
DR. ARUN SAXENA| Project Guide
November 5, 2022
1](https://image.slidesharecdn.com/miniprojectshortestpathvisualizer-221116140955-b96e527e/75/mini-project_shortest-path-visualizer-pptx-1-2048.jpg)

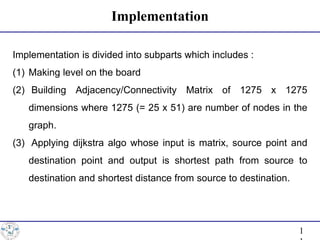
![Implementation
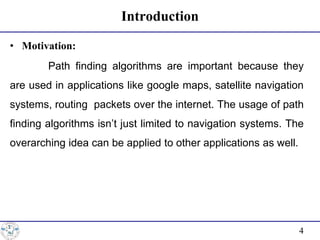
(2) Building Adjacency Matrix
- Our 1275 nodes(buttons) will make matrix of 1275 x
1275 dimensions. Each element of matrix adj[i][j]
represents some information.
- Adj[i][j] means element of ith row and jth column and if
adj[i][j] is 1 then node ‘i’ is connected to node ‘j’ and if it is
0 then node ‘i’ and ‘j’ are not connected.](https://image.slidesharecdn.com/miniprojectshortestpathvisualizer-221116140955-b96e527e/85/mini-project_shortest-path-visualizer-pptx-12-320.jpg)
![Implementation
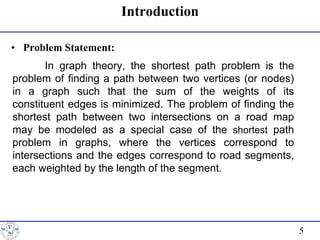
Visualisation of Implementation (Src=1, Dest.=4)
When algo is on source queue will be like
[[[Element{data = 0, distanceOf = 1, via = -1, priority = 0}]]]
It is then dequeued and is checked for neighbours and set
as follows.
[[[Element{data = 1, distanceOf = 2, via = 1, priority = 0}
Element{data = 1, distanceOf = 3, via = 1, priority = 1}]]]](https://image.slidesharecdn.com/miniprojectshortestpathvisualizer-221116140955-b96e527e/85/mini-project_shortest-path-visualizer-pptx-15-320.jpg)
![Implementation
• Stack when node = 1 (At Source) Stack will be
(((Element{data = 1, distanceOf = 2, via = 1} Element{data = 0,
distanceOf = 1, via = -1})))
• Queue when current node = 2
[[[Element{data = 1, distanceOf = 3, via = 1, priority = 0}
Element{data = 2, distanceOf = 4, via = 2, priority = 1}]]]
• Stack when current node = 2
((( Element{data = 2, distanceOf = 4, via = 2}
Element{data = 1, distanceOf = 2, via = 1}
Element{data = 0, distanceOf = 1, via = -1} )))
• Backtracking Takes Place
pathArray = [4, 2, 1] (Destination -> Source) path Distance = 2](https://image.slidesharecdn.com/miniprojectshortestpathvisualizer-221116140955-b96e527e/85/mini-project_shortest-path-visualizer-pptx-16-320.jpg)
![References
1) [1]. "7.2.1 Single Source Shortest Paths Problem: Dijkstra's
Algorithm". Archived from the original on 2016-03-04.
2) [2]. Delling, D.; Sanders, P.; Schultes, D.; Wagner, D. (2009).
"Engineering route planning algorithms". Algorithmics of
Large and Complex Networks: Design, Analysis, and
Simulation. Lecture Notes in Computer Science. 5515.
Springer. pp. 117–139.
3) [3]. Crawford, Chris (December 1982). "Design Techniques
and Ideas for Computer Games". BYTE. p. 96. Retrieved 19
October 2013.
4) [4]. Holte, Robert C and Perez, MB and Zimmer, RM and
MacDonald, AJ (1995). Hierarchical a*. Symposium on
Abstraction, Reformulation, and Approximation.
23](https://image.slidesharecdn.com/miniprojectshortestpathvisualizer-221116140955-b96e527e/85/mini-project_shortest-path-visualizer-pptx-20-320.jpg)




![Online Shopping System [SE]](https://cdn.slidesharecdn.com/ss_thumbnails/presentation-160111163349-thumbnail.jpg?width=640&height=640&fit=bounds)







































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)


















