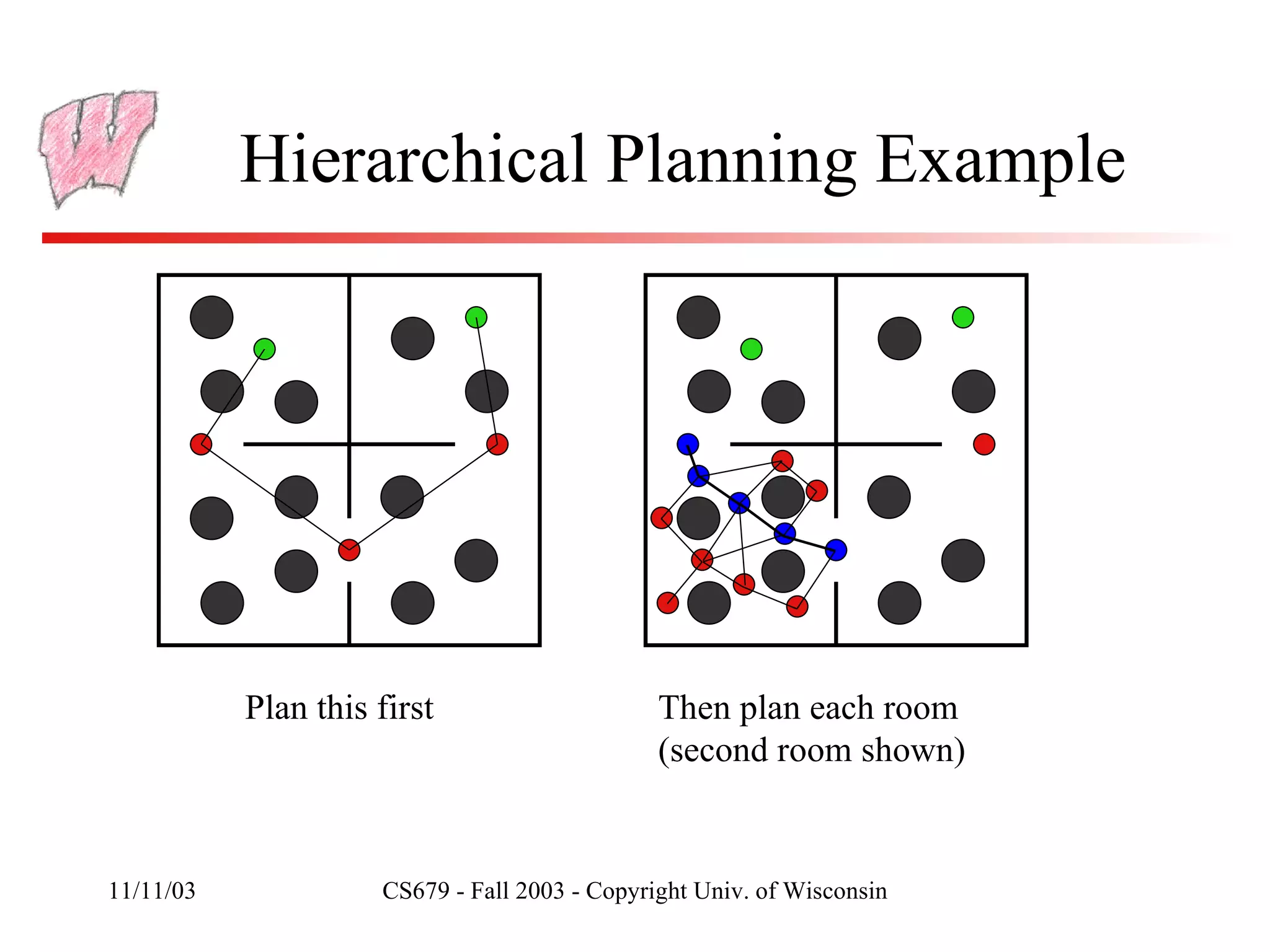

The document discusses path planning algorithms like A* search and techniques for improving path quality and efficiency. It describes using heuristics and hierarchical planning to make A* faster while still producing optimal or near-optimal paths. It also covers pre-computing all-pair shortest paths to avoid replanning for static environments.