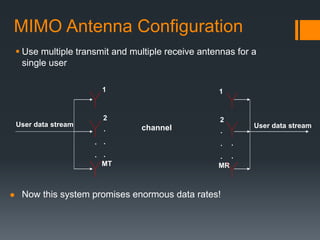
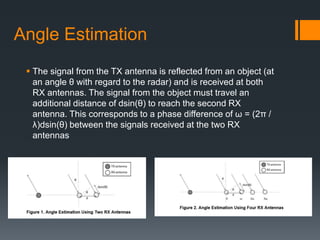
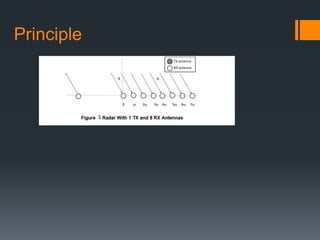
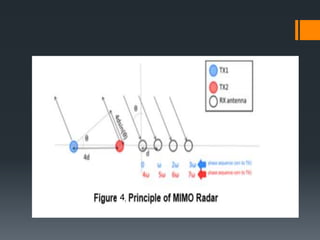
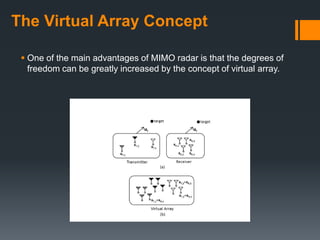
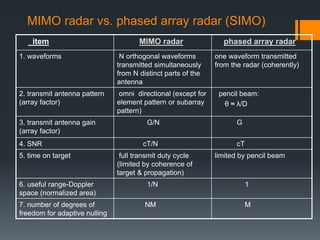
This document provides an overview of MIMO (Multiple Input Multiple Output) radar. MIMO radar uses multiple transmit and receive antennas. This allows it to achieve higher angular resolution than traditional phased array radars with fewer antennas. MIMO radar works by having receive antennas separately process signals from different transmit antennas, using techniques like time division multiplexing and binary phase modulation. The virtual array concept enables MIMO radar to greatly increase its degrees of freedom beyond the physical number of antennas. Potential applications of MIMO radar include air surveillance, clutter mitigation, and moving target detection.



![REFRENCES
[1] Y. I. Abramovich and G. J. Frazer, “Bounds on the Volume and Height
Distributions for theMIMO Radar Ambiguity Function,” IEEE Signal Processing
Letters, Volume 15, pp. 505–508,May 2008.
[2] G. S. Antonio and D. R. Fuhrmann, “Beampattern Synthesis for Wideband
MIMO Radar Systems,” Proc. 1st. IEEE International Workshop on
Computational Advances in Multi-Sensor AdaptiveProcessing, pp. 105–108, Dec.
2005.
[3] S. P. Applebaum and D. J. Chapman, “Adaptive arrays with main beam
constraints,” IEEETrans. Ant. Prop., vol. AP-24, pp. 650–662, Sept. 1976.
[4] M. R. Bell, “Information Theory and Radar Waveform Design,” IEEE Trans. on
Information Theory, Vol 39, Issue 5, pp. 1578–1597, Sept. 1993.
[5] K. L. Bell, Y. Ephraim, and H. L. Van Trees, “A Bayesian approach to robust
adaptive beamforming”,IEEE Trans. Sig. Proc., vol. 48, pp. 386–398, Feb. 2000.
[6] D. W. Bliss and K. W. Forsythe, “Multiple-input multiple-output (MIMO) radar and
imaging: degrees of freedom and resolution,” Proc. 37th IEEE Asilomar Conf. on
Signals, Systems, and Computers,](https://image.slidesharecdn.com/mimoradar1-180412113811/85/Mimo-radar-1-21-320.jpg)







































![Mimo [new]](https://cdn.slidesharecdn.com/ss_thumbnails/mimonew-150914045107-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)


























