Microprocessor & Interfacing (Part-2) By Er. Swapnil V. Kaware
•
4 likes•850 views

Microprocessor & Interfacing (Part-2) By Er. Swapnil V. Kaware

Recommended
More Related Content
What's hot
What's hot (19)
Viewers also liked
Similar to Microprocessor & Interfacing (Part-2) By Er. Swapnil V. Kaware
Similar to Microprocessor & Interfacing (Part-2) By Er. Swapnil V. Kaware (20)
More from Prof. Swapnil V. Kaware
More from Prof. Swapnil V. Kaware (20)
Recently uploaded
Recently uploaded (20)
Microprocessor & Interfacing (Part-2) By Er. Swapnil V. Kaware
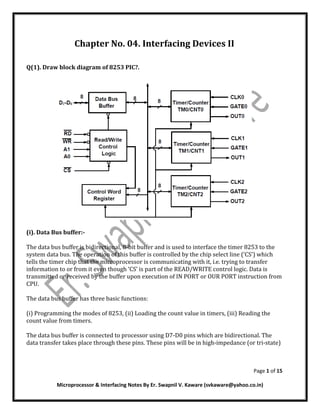
- 1. Page 1 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) Chapter No. 04. Interfacing Devices II Q(1). Draw block diagram of 8253 PIC?. (i). Data Bus buffer:- The data bus buffer is bidirectional, 8-bit buffer and is used to interface the timer 8253 to the system data bus. The operation of this buffer is controlled by the chip select line (‘CS’) which tells the timer chip that the microprocessor is communicating with it, i.e. trying to transfer information to or from it even though ‘CS’ is part of the READ/WRITE control logic. Data is transmitted or received by the buffer upon execution of IN PORT or OUR PORT instruction from CPU. The data bus buffer has three basic functions: (i) Programming the modes of 8253, (ii) Loading the count value in timers, (iii) Reading the count value from timers. The data bus buffer is connected to processor using D7-D0 pins which are bidirectional. The data transfer takes place through these pins. These pins will be in high-impedance (or tri-state)
- 2. Page 2 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) condition until the 8253 is selected by a LOW on CS and either the read operation requested by a LOW on the R D input or a write operation requested by the WR input going LOW. Read/ Write Logic: It accepts inputs for the system control bus and in turn generates the control signals for overall device operation. It is enabled or disabled by C S so that no operation can occur to change the function unless the device has been selected by the system logic. CS:- The chip select input is used to enable the communication between 8253 chip and the microprocessor by means of data bus. A low on C S enables the data bus buffers, while a high disables the buffer. The CS input does not have any affect on the operation of three timers once they have been initialized. The normal configuration of a system employs some decoding logic which actives CS line, whenever a specific set of addresses that correspond to 8253 appear on the address bus. RD & WR: - The read (‘RD’) and write (‘WR’) pins control the direction of data transfer on the 8-bit bus. When the RD input pin is low, then CPU is reading data from 8253 in the form of counter value. When WR pin is low, then CPU is writing data to 8253 in the form of mode information or loading initial count values to counters. The RD & WR should not both be low simultaneously. When RD & WR signals are HIGH, the data bus buffer is disabled and no data transfer takes place between processor and 8253. A0 & A1: These two input lines allow the microprocessor to specify which one of the internal register in the 8253 is going to be used for the data transfer. Fig shows how these two lines are used to select either the control word register or one of the 16-bit counters. For example, if there is a, “1” on both A0 & A1, and a “0‟ on WR , then the processor is writing a control word to the control word register. These two pins are usually connected to the address bus lines, normally of the same name (A0 & A1). A1 A0 RD WR CS Result 0 0 1 0 0 Write Counter 0 0 1 1 0 0 Write Counter 1 1 0 1 0 0 Write Counter 2
- 3. Page 3 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) 1 1 1 0 0 Write Control Word 0 0 0 1 0 Read Counter 0 0 1 0 1 0 Read Counter 1 1 0 0 1 0 Read Counter 2 1 1 0 1 0 No operation X X 1 1 0 No operation X X X X 1 No operation Control Word Register: - The control word register is used to program the timers in different modes and control their operations. It is selected when A0 and A1 pins are 1 & 1‟. If WR is also low, it accepts information from the data bus buffer and stores it in control word register. The information stored then controls the operation mode of each counter, selection of binary or BCD counting and the loading of each counting and the loading of each count register. This register can be written into only; no read operation of this content is available. The format will be discussed later on. Counters:- Each of the timers has three pins associated with it. These are clock (CLK) input, the gate (GATE) control input and the output (OUT). CLK:- This clock input pin provides 16-bit timer with the signal that causes the timer to decrement. The maximum clock frequency input is 2.6MHz. Note that the counters operate at HIGH to LOW transition (the negative edge) of this clock input. If the signal on this pin is generated by a fixed frequency oscillator then the user has implemented a standard timer for getting the desired delay. The count value to be loaded, in this case, determines the delay produced by the timer. If the input signal is a string of randomly occurring pulses, then it is called implementation of a counter. In this case, these clock pulses occur whenever an event takes place. Whenever a negative transition occurs at CLK input, the count value is decremented. From initial and value one can count the number of times an event has taken place in an interval.
- 4. Page 4 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) GATE:- The gate input pin is used to initiate or enable counting. The exact effect of the gate signal depends on which of the six modes of operation is chosen. OUTPUT:- The output pin provides an output from the timer. Its actual use depends on the mode of operation of the timer. The counter can be read “on the fly” without inhibiting gate pulse or clock input. The timers are 16-bit down counters. These timers are loaded with an initial value before triggering. Every high to low transition at CLK input decrements the count by one. The operation of timers can be best understood by considering the internal structure of timer. Each timer is having three elements- input element (IE), counting element (CE) and output element (OE). Q(2). Draw & explain Control word format of 8253 PIC?.
- 5. Page 5 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) Q(3). Explain Various modes of operation of 8253 PIC?. 8253/54 can be operated in 6 different modes. (i).Mode0─InterruptonTerminalCount:- It is used to generate an interrupt to the microprocessor after a certain interval. Initially the output is low after the mode is set. The output remains LOW after the count value is loaded into the counter. The process of decrementing the counter continues till the terminal count is reached, i.e., the count become zero and the output goes HIGH and will remain high until it reloads a new count. The GATE signal is high for normal counting. When GATE goes low, counting is terminated and the current count is latched till the GATE goes high again. (ii).Mode1–ProgrammableOneShot:- It can be used as a mono stable multi-vibrator. The gate input is used as a trigger input in this mode. The output remains high until the count is loaded and a trigger is applied. (iii).Mode2–RateGenerator:-
- 6. Page 6 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) The output is normally high after initialization. Whenever the count becomes zero, another low pulse is generated at the output and the counter will be reloaded. (iv).Mode3–SquareWaveGenerator:- This mode is similar to Mode 2 except the output remains low for half of the timer period and high for the other half of the period. (v).Mode4−SoftwareTriggeredMode:- In this mode, the output will remain high until the timer has counted to zero, at which point the output will pulse low and then go high again. The count is latched when the GATE signal goes LOW. On the terminal count, the output goes low for one clock cycle then goes HIGH. This low pulse can be used as a strobe. (vi). Mode5–HardwareTriggeredMode:-
- 7. Page 7 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) This mode generates a strobe in response to an externally generated signal. This mode is similar to mode 4 except that the counting is initiated by a signal at the gate input, which means it is hardware triggered instead of software triggered. After it is initialized, the output goes high. When the terminal count is reached, the output goes low for one clock cycle. Q(4). Draw and explain block diagram of 8275 CRT controller?.
- 8. Page 8 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) Q(5). Draw & explain block diagram of 8237 DMA controller?. Direct Memory Access (DMA) is a method of allowing data to be moved from one location to another in a computer without intervention from the central processor (CPU). It is also a fast way of transferring data within (and sometimes between) computer. The DMA I/O technique provides direct access to the memory while the microprocessor is temporarily disabled. The DMA controller temporarily borrows the address bus, data bus and control bus from the
- 9. Page 9 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) microprocessor and transfers the data directly from the external devices to a series of memory locations (and vice versa). DMA Operation:- Two control signals are used to request and acknowledge a direct memory access (DMA) transfer in the microprocessor-based system. The HOLD signal as an input(to the processor) is used to request a DMA action. The HLDA signal as an output that acknowledges the DMA action When the processor recognizes the hold, it stops its execution and enters hold cycles. HOLD input has higher priority than INTR or NMI. The only microprocessor pin that has a higher priority than a HOLD is the RESET pin. HLDA becomes active to indicate that the processor has placed its buses at high-impedance state. Direct memory accesses normally occur between an I/O device and memory without the use of the microprocessor. A DMA read transfers data from the memory to the I/O device. A DMA write transfers data from an I/O device to memory. The system contains separate memory and I/O control signals. Hence the Memory & the I/O are controlled simultaneously. The DMA controller provides memory with its address, and the controller signal selects the I/O device during the transfer. Data transfer speed is determined by speed of the memory device or a DMA controller. In many cases, the DMA controller slows the speed of the system when transfers occur. The serial PCI (Peripheral Component Interface) Express bus transfers data at rates exceeding DMA transfers. This in modern systems has made DMA is less important. The 8237 supplies memory & I/O with control signals and memory address information during the DMA transfer. It is actually a special-purpose microprocessor whose job is high-speed data transfer between memory and I/O.
- 10. Page 10 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) Q(6). Draw & explain block diagram of 8237 DMA controller?. Q(7). Explain various operating modes of 8237 DMA controller?. A single byte (or word) is transferred. The DMA must release and re-acquire the bus for each additional byte. This is commonly-used by devices that cannot transfer the entire block of data immediately. The peripheral will request the DMA each time it is ready for another transfer. The floppy disk controller only has a one-byte buffer, so it uses this mode. (i). Block/Demand mode:- Once the DMA acquires the system bus, an entire block of data is transferred, up to a maximum of 64K. If the peripheral needs additional time, it can assert the READY signal. READY should not be used excessively, and for slow peripheral transfers, the Single Transfer Mode should be used instead. The difference between Block and Demand is the once a Block transfer is started, it runs until the transfer count reaches zero. DRQ only needs to be asserted until -DACK is asserted. Demand Mode will transfer one more bytes until DRQ is de-asserted, then when DRQ is asserted later, the transfer resumes where it was suspended. Older hard disk controllers used Demand Mode until CPU speeds increased to the point that it was more efficient to read the data using the CPU.
- 11. Page 11 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) (ii). Cascade mode:- This mechanism allows a DMA channel to request the bus, but then the attached peripheral device is responsible for placing addressing information on the bus. This is also known as ``Bus Mastering''. When a DMA channel in Cascade Mode receives control of the bus, the DMA does not place addresses and I/O control signals on the bus like it normally does. Instead, the DMA only asserts the -DACK signal for this channel. Now it is up to the device connected to that DMA channel to provide address and bus control signals. The peripheral has complete control over the system bus, and can do reads and/or writes to any address below 16Meg. When the peripheral is finished with bus, it de-asserts the DRQ line, and the DMA controller can return control to the CPU or to some other DMA channel. Cascade Mode can be used to chain multiple DMA controllers together, and this is exactly what DMA Channel 4 is used for in the PC. When a peripheral requests the bus on DMA channels 0, 1, 2 or 3, the slave DMA controller asserts HLDREQ, but this wire is actually connected to DRQ4 on the primary DMA controller. The primary DMA controller then requests the bus from the CPU using HLDREQ. (iv). Autoinitialize mode:- This mode causes the DMA to perform Byte, Block or Demand transfers, but when the DMA transfer counter reaches zero, the counter and address is set back to where they were when the DMA channel was originally programmed. This means that as long as the device requests transfers, they will be granted. It is up to the CPU to move new data into the fixed buffer ahead of where the DMA is about to transfer it for output operations, and read new data out of the buffer behind where the DMA is writing on input operations. This technique is frequently used on audio devices that have small or no hardware ``sample'' buffers. There is additional CPU overhead to manage this ``circular'' buffer, but in some cases this may be the only way to eliminate the latency that occurs when the DMA counter reaches zero and the DMA stops until it is reprogrammed. Q(8). Internal architecture of 8086 microprocessor?. OR Q(9). Explain various registers of 8086 microprocessor?. 8086 Microprocessor is divided into two functional units, i.e., EU (Execution Unit) and BIU (Bus Interface Unit). Execution Unit:- The Execution unit is responsible for decoding and executing all instructions. The EU extracts instructions from the top of the queue in the BIU, decodes them, generates operands if necessary, passes them to the BIU and requests it to perform the read or write bys cycles to memory or I/O and perform the operation specified by the instruction on the operands.
- 12. Page 12 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) During the execution of the instruction, the EU tests the status and control flags and updates them based on the results of executing the instruction. If the queue is empty, the EU waits for the next instruction byte to be fetched and shifted to top of the queue. When the EU executes a branch or jump instruction, it transfers control to a location corresponding to another set of sequential instructions. Whenever this happens, the BIU automatically resets the queue and then begins to fetch instructions from this new location to refill the queue. ALU:- It handles all arithmetic and logical operations, like +, −, ×, /, OR, AND, NOT operations. Flag Register:-
- 13. Page 13 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) It is a 16-bit register that behaves like a flip-flop, i.e. it changes its status according to the result stored in the accumulator. It has 9 flags and they are divided into 2 groups − Conditional Flags and Control Flags. Conditional Flags:- It represents the result of the last arithmetic or logical instruction executed. Following is the list of conditional flags, Carry flag − This flag indicates an overflow condition for arithmetic operations. Auxiliary flag − When an operation is performed at ALU, it results in a carry/barrow from lower nibble (i.e. D0 – D3) to upper nibble (i.e. D4 – D7), then this flag is set, i.e. carry given by D3 bit to D4 is AF flag. The processor uses this flag to perform binary to BCD conversion. Parity flag − This flag is used to indicate the parity of the result, i.e. when the lower order 8- bits of the result contains even number of 1’s, then the Parity Flag is set. For odd number of 1’s, the Parity Flag is reset. Zero flag − This flag is set to 1 when the result of arithmetic or logical operation is zero else it is set to 0. Sign flag − This flag holds the sign of the result, i.e. when the result of the operation is negative, then the sign flag is set to 1 else set to 0. Overflow flag − This flag represents the result when the system capacity is exceeded. Control Flags:- Control flags controls the operations of the execution unit. Following is the list of control flags, Trap flag − It is used for single step control and allows the user to execute one instruction at a time for debugging. If it is set, then the program can be run in a single step mode. Interrupt flag − It is an interrupt enable/disable flag, i.e. used to allow/prohibit the interruption of a program. It is set to 1 for interrupt enabled condition and set to 0 for interrupt disabled condition. Direction flag − It is used in string operation. As the name suggests when it is set then string bytes are accessed from the higher memory address to the lower memory address and vice-a- versa.
- 14. Page 14 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) General purpose register:- There are 8 general purpose registers, i.e., AH, AL, BH, BL, CH, CL, DH, and DL. These registers can be used individually to store 8-bit data and can be used in pairs to store 16bit data. The valid register pairs are AH and AL, BH and BL, CH and CL, and DH and DL. It is referred to the AX, BX, CX, and DX respectively. AX register − It is also known as accumulator register. It is used to store operands for arithmetic operations. BX register − It is used as a base register. It is used to store the starting base address of the memory area within the data segment. CX register − It is referred to as counter. It is used in loop instruction to store the loop counter. DX register − This register is used to hold I/O port address for I/O instruction. Stack pointer register:- It is a 16-bit register, which holds the address from the start of the segment to the memory location, where a word was most recently stored on the stack. BIU(BusInterfaceUnit):- The Bus Interface Unit contains Bus Interface Logic, Segment registers, Memory addressing logic and a Six byte instruction object code queue. The BIU sends out address, fetches the instructions from memory, read data from ports and memory, and writes the data to ports and memory. BIU takes care of all data and addresses transfers on the buses for the EU like sending addresses, fetching instructions from the memory, reading data from the ports and the memory as well as writing data to the ports and the memory. EU has no direction connection with System Buses so this is possible with the BIU. EU and BIU are connected with the Internal Bus. It has the following functional parts, Instruction queue − BIU contains the instruction queue. BIU gets up to 6 bytes of next instructions and stores them in the instruction queue. When EU executes instructions and is ready for its next instruction, then it simply reads the instruction from this instruction queue resulting in increased execution speed. Fetching the next instruction while the current instruction executes is called pipelining. Segment register − BIU has 4 segment buses, i.e. CS, DS, SS & ES. It holds the addresses of instructions and data in memory, which are used by the processor to access memory locations. It also contains 1 pointer register IP, which holds the address of the next instruction to executed by the EU.
- 15. Page 15 of 15 Microprocessor & Interfacing Notes By Er. Swapnil V. Kaware (svkaware@yahoo.co.in) CS − It stands for Code Segment. It is used for addressing a memory location in the code segment of the memory, where the executable program is stored. DS − It stands for Data Segment. It consists of data used by the program andis accessed in the data segment by an offset address or the content of other register that holds the offset address. SS − It stands for Stack Segment. It handles memory to store data and addresses during execution. ES − It stands for Extra Segment. ES is additional data segment, which is used by the string to hold the extra destination data. Instruction pointer − It is a 16-bit register used to hold the address of the next instruction to be executed. ***************************************** ALL THE BEST *****************************************