Download as PDF, PPTX


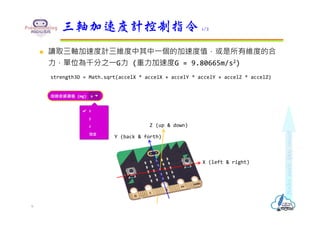

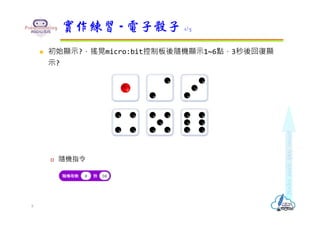
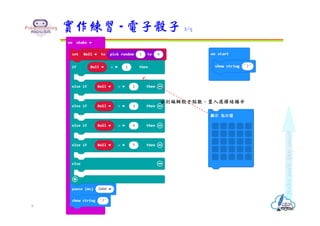
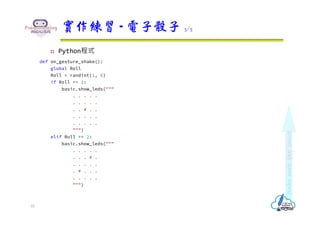
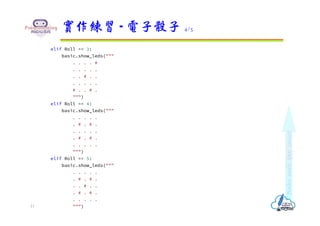
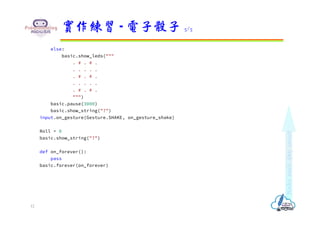

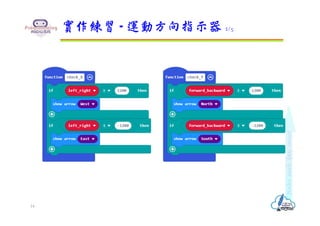

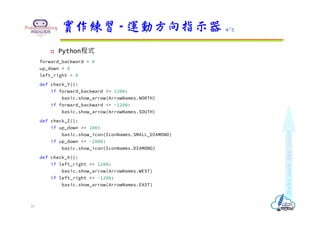
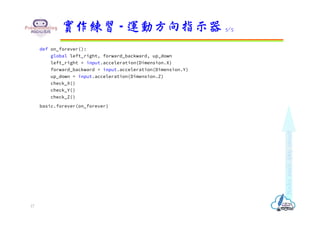

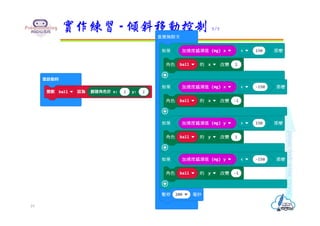



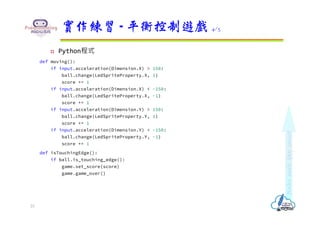
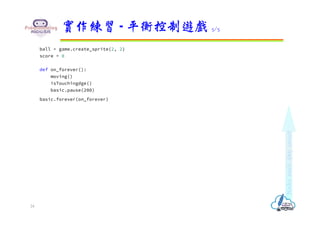
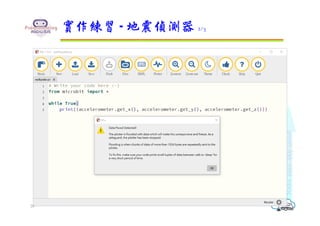
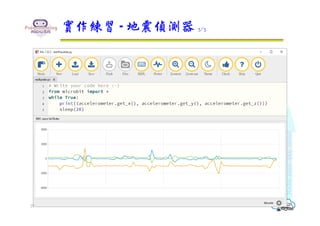

The document discusses various micro:bit accelerometer applications including: - Reading acceleration values from the 3-axis accelerometer and controlling it. - Examples like a electronic dice, movement indicator, tilt control game, and earthquake detector. - Code snippets are provided for building applications like tracking dice rolls on shakes, showing direction arrows based on movement, and controlling a light sprite in a balancing game.




























































