Download as PDF, PPTX
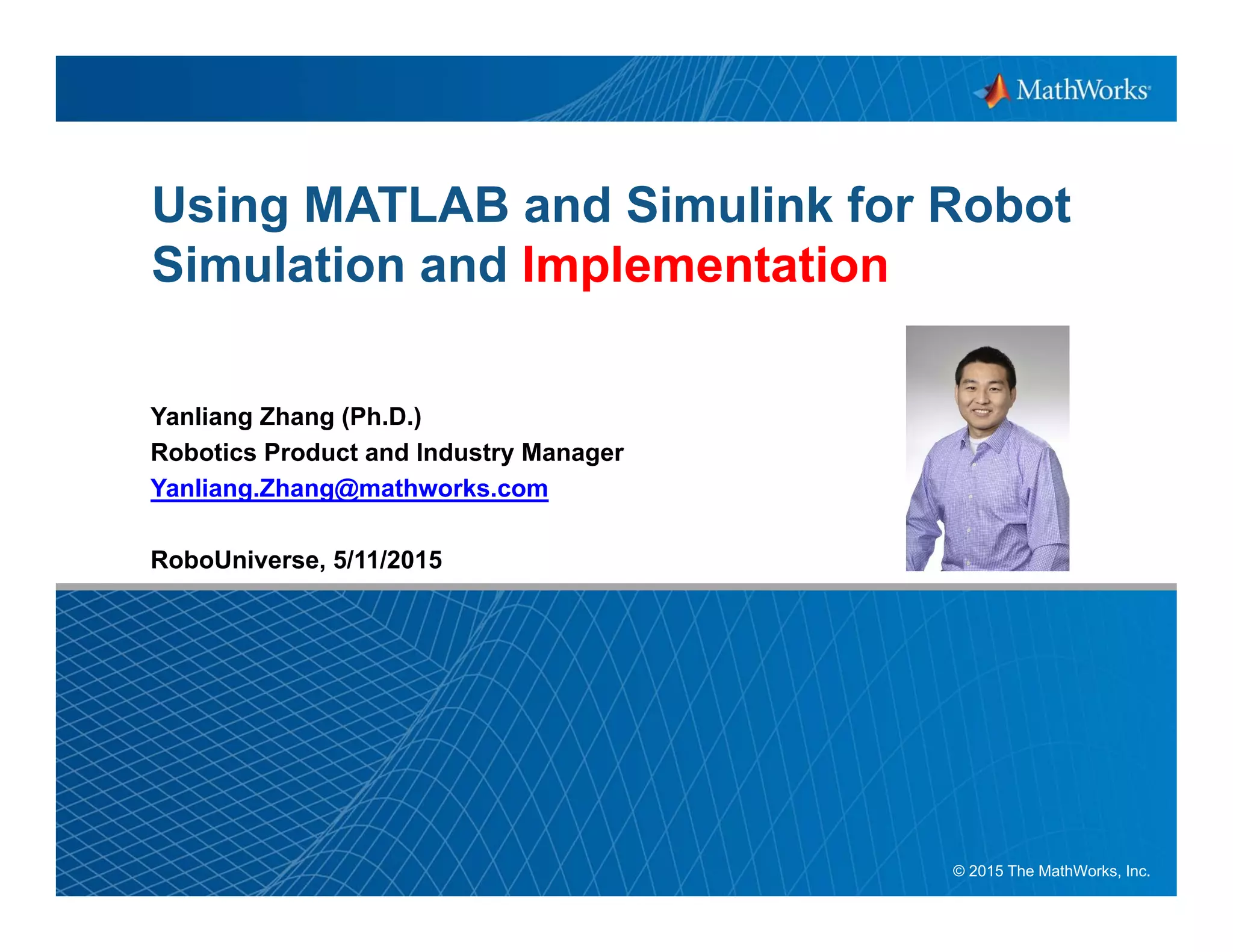
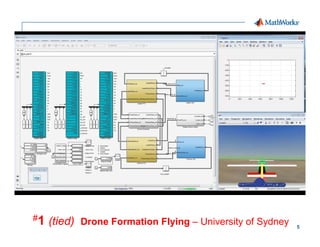
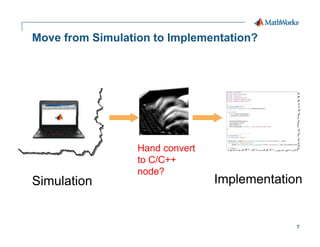

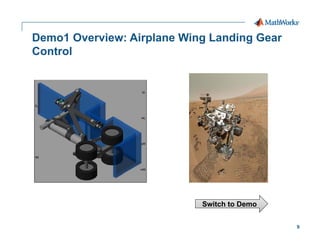
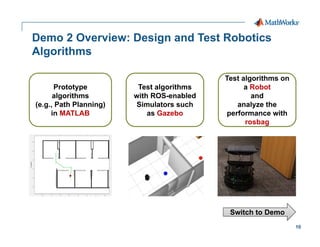
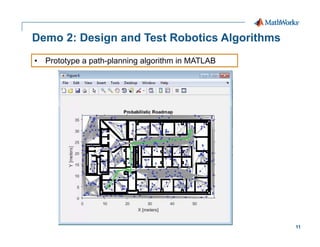

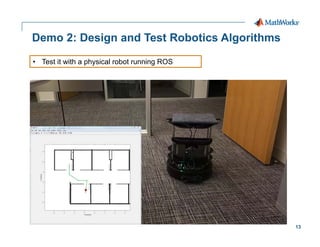
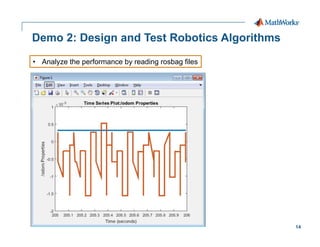
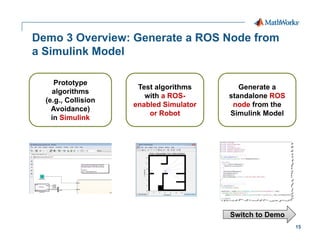
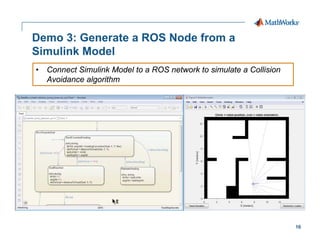
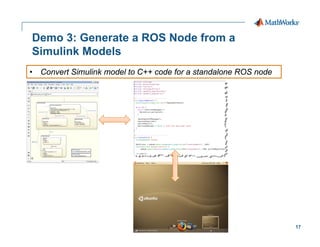
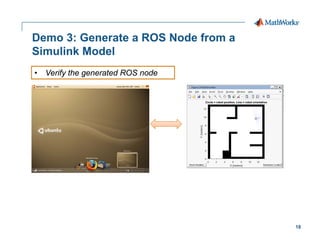


The document discusses how MATLAB and Simulink can be used for robot simulation and implementation, highlighting several robotics projects that used these tools including simulating a Tesla Roadster and developing thought-controlled prosthetics. It then demonstrates how algorithms developed in MATLAB and Simulink can be tested in robot simulators like Gazebo and on physical robots through ROS, and how Simulink models can be converted to C++ code to deploy as standalone ROS nodes.










































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)









