Downloaded 76 times


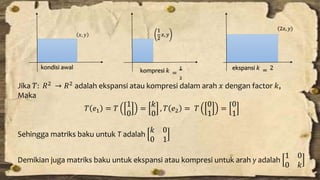
![Definisi jika F: V W adalah suatu fungsi dari ruang vektor V ke dalam ruang
vektor W, maka F dikatakan transformasi linier jika:
F(u + v) = F(u) + F(v) untuk semua vektor u dan v di dalam V.
F(ku) = k F(u) untuk semua vektor u di dalam V dan semua skalar k.
Untuk melukiskannya, misalkan F : R2 R3 adalah fungsi yang didefinisikan oleh
(5.1). Jika u = (x1,y1) dan v = (x2,y2), maka u+v = ( x1 + x2,y1 + y2 ), sehingga
F(u+v) = ( x1 + x2, [x1+x2] + [y1 + y2], [x1+x2] - [y1 + y2])
=( x1, x1 + y1, x1 - y1) + (x2, x2 + y2, x2 - y2)
F(u+v) = F(u) + F(v)
jika k adalah sebuah scalar, ku = (kx1,ky1), sehingga
F(ku) = (kx1, kx1 + ky1, kx1 – ky1)
= k(x1, x1 + y1, x1 - y1)
F(ku) = kF(u)
Jadi F adalah sebuah tranformasi
linier.](https://image.slidesharecdn.com/magetransformasilinierbackup-140821204716-phpapp01/85/matematika-geodesi-transformasi-linier-6-320.jpg)


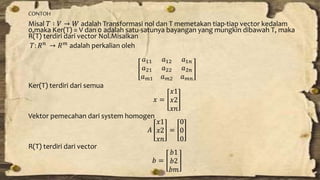

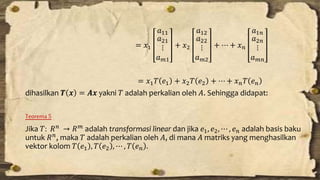
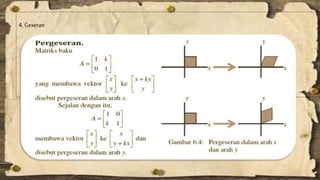
![Transformasi linier 푇: 푉 → 푊 dapat dipandang sebagai TRANSFORMASI
MATRIKS. Jika dipilih basis B dan B’ untuk V dan W , maka untuk setiap x di dalam V,
matriks kordinat [x]B akan merupakan sebuah vektor didalam Rn dan matriks kordiat
[T(x)]B, akan merupakan vector di dalam Rm . jadi di dalam proses pemetaan x ke
dalam T(x), transformasi linier T menghasilkan sebuah pemetaan Rn ke Rm dengan
mengirimkan [x]B ke dalam [T(x)]B’. Maka mariks A standar untuk transformasi ini
adalah
A[x]B = [T(x)]B
Untuk mencari matriks A dapat dihitung dalam 3 langkah dengan metode tak
langsung berikut:
1) Hitung matriks kordinat [x]B
2) Kalikan [x]B di sebelah kiri dengan A untuk menghasilkan [T(x)]B’
3) Bangun kembali T(x) dari matriks kordinatnya [T(x)]B’](https://image.slidesharecdn.com/magetransformasilinierbackup-140821204716-phpapp01/85/matematika-geodesi-transformasi-linier-33-320.jpg)
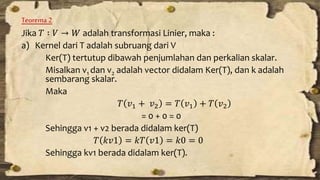
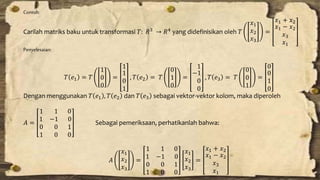
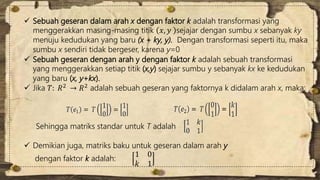
![Contoh 1:
Misalkan 푇: 푃1 → 푃2 adalah transformasi linier yang didefinisikan oleh T(p()x)=xp(x)
Carilah matriks untuk T terhadap basis B={u1,u2} dan B’= {u’1,u’2, u’3} Dimana u1=1, u2=
x, u’1 =1, u’2= x, u’3 = x2
Pemecahan:
Dari rumus T didapat
T(u1) = T(1) = (x)(1) = x T(u2) = T(x) = (x)(x) = x2
Maka matriks kordinat untuk T(u1) dan T(u2) relative kepada B’ yakni:
[T(u1)]B =
0
1
0
, [T(u2)]B’ =
0
0
1
Jadi matriks T terhadap baris B dan B’ adalah
A=[ [T(u1)]B [T(u2)]B’] =
0 0
1 0
0 1](https://image.slidesharecdn.com/magetransformasilinierbackup-140821204716-phpapp01/85/matematika-geodesi-transformasi-linier-34-320.jpg)
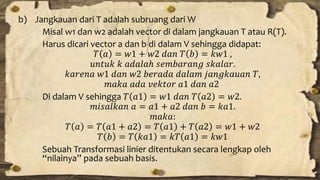
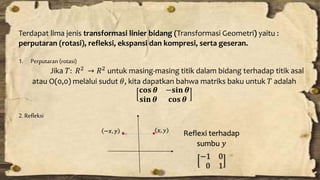
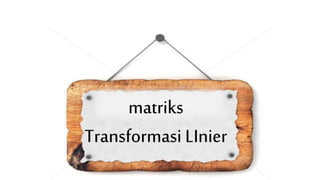
![Contoh 2:
Misalkan 푇: 푃1 → 푃2, 퐵, 퐵′ adalah basis di dalam contoh sebelumnya dan dimisalkan
x= 1-2x
Gunakan hasil matriks contoh sebelumya untuk menghitung T(x) menurut prosedut
tak langsung !
Pemecahan:
Matriks kordinat x terhadap B adalah [x]B=
1
−2
Maka [T(x)]B’ = A[x]B =
0 0
1 0
0 1
1
−2
=
0
1
−2
Jadi
T(x)= 0 u’1 + 1u’2 + 2u’3 =0(1) + 1(x)- 2(x2) = x-2x2
Jika dihitung dengan metode langsung
T(x)= T (1-2x) = x(1-2x) = x-2x2
Jadi untuk
pemeriksaan, hasil
perhitungan dengan
metode langsung
dan tak langsung
harus sama](https://image.slidesharecdn.com/magetransformasilinierbackup-140821204716-phpapp01/85/matematika-geodesi-transformasi-linier-35-320.jpg)

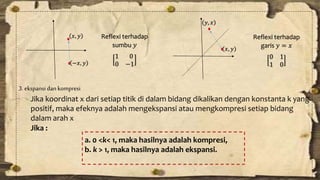
![Jika T : V->V adalah sebuah
operator linier pada suatu ruang
vektor berdimensi terhingga V,
dan jika B dan B’ adalah basis
basis untuk V, maka
[T]B’= P-1 [T]BP
Dimana P adalah matriks transisi
dari B’ ke B](https://image.slidesharecdn.com/magetransformasilinierbackup-140821204716-phpapp01/85/matematika-geodesi-transformasi-linier-37-320.jpg)


Dokumen ini membahas tentang transformasi linier, yang didefinisikan sebagai fungsi pemetaan antara ruang vektor. Transformasi ini memenuhi dua sifat utama: penjumlahan dan pengalian skalar. Terdapat pula pembahasan mengenai kernel, jangkauan, dan teorema yang berkaitan dengan rank dan nulitas dari transformasi linier.