Download to read offline


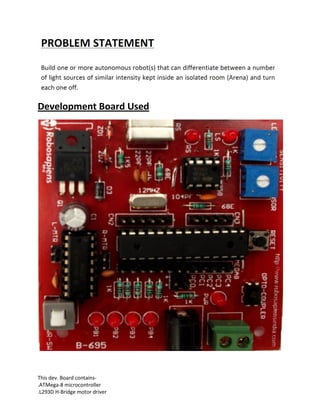
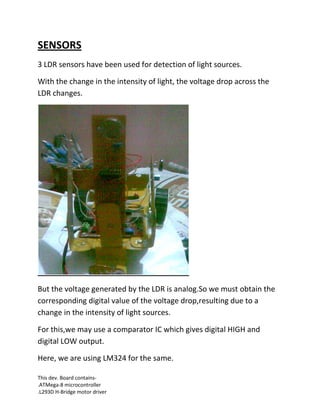
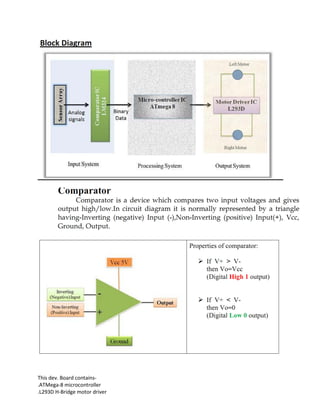









This document describes a development board that contains an ATMega-8 microcontroller and L293D H-Bridge motor driver. It uses 3 LDR sensors and a comparator IC to obtain digital light intensity readings from analog sensor outputs. An Embedded C program controls the motor driver outputs based on the sensor readings to drive the bot straight, left or right. The bot completes two runs through an obstacle course, scoring points based on time taken and obstacles reached.