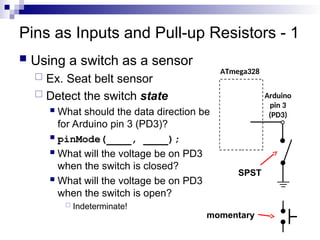
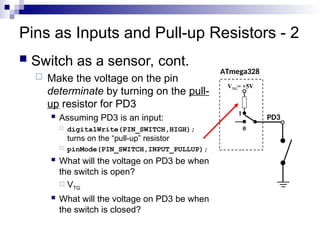
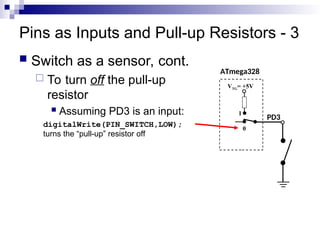
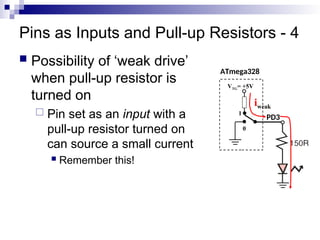
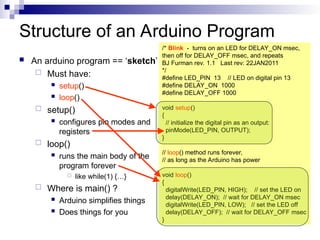
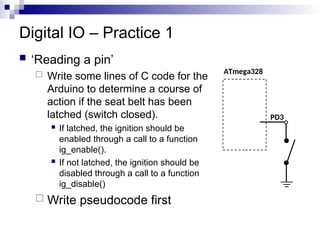
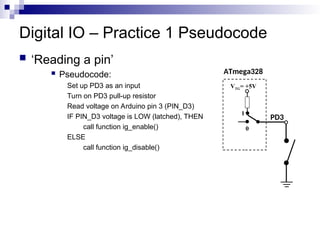
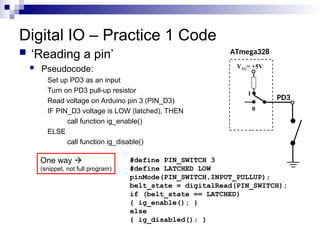
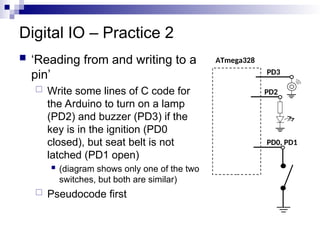
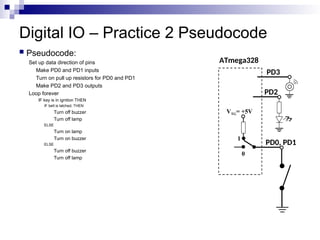
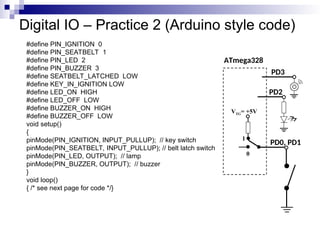
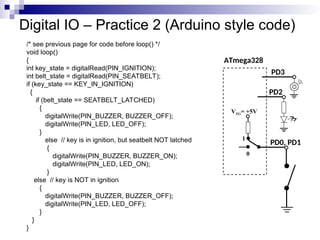
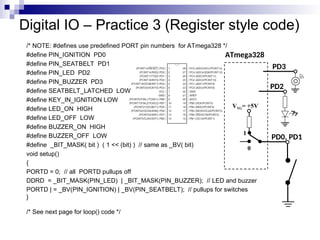
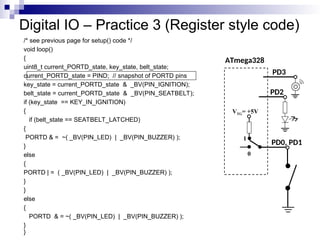
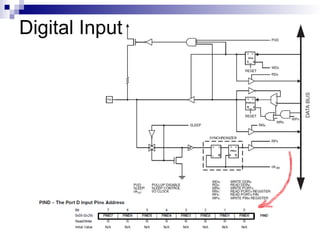
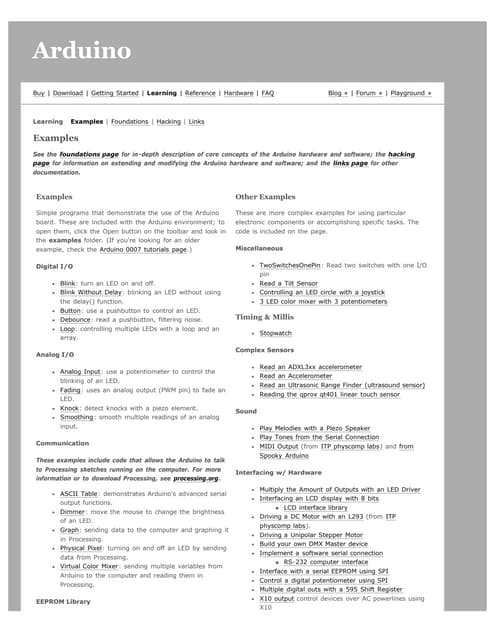
This document provides an introduction to microcontrollers, specifically focusing on the architecture and features of the ATmega328 microcontroller and Arduino. It covers basic concepts of digital and analog inputs and outputs, pin configurations, as well as programming structure and examples for controlling devices using Arduino. Key features and programming methodologies are detailed to assist in understanding microcontroller operations and interfacing elements.