Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
直住
Uploaded by
直久 住川
884 views
ACRiウェビナー:小野様ご講演資料
第8回ACRiウェビナー:小野様ご講演資料 「HLSは私の救世主?(使わなきゃ損です…)」
Engineering
◦
Read more
1
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 36
2
/ 36
Most read
3
/ 36
4
/ 36
Most read
5
/ 36
6
/ 36
7
/ 36
8
/ 36
9
/ 36
10
/ 36
11
/ 36
12
/ 36
13
/ 36
14
/ 36
15
/ 36
16
/ 36
17
/ 36
18
/ 36
19
/ 36
20
/ 36
21
/ 36
22
/ 36
23
/ 36
24
/ 36
25
/ 36
26
/ 36
27
/ 36
28
/ 36
29
/ 36
30
/ 36
31
/ 36
32
/ 36
33
/ 36
34
/ 36
35
/ 36
36
/ 36
Most read
More Related Content
PDF
Vivado hls勉強会5(axi4 stream)
by
marsee101
PDF
Vivado hls勉強会1(基礎編)
by
marsee101
PDF
ACRi HLSチャレンジ 高速化テクニック紹介
by
Jun Ando
PDF
「FPGA 開発入門:FPGA を用いたエッジ AI の高速化手法を学ぶ」
by
直久 住川
PDF
いまさら聞けないarmを使ったNEONの基礎と活用事例
by
Fixstars Corporation
PPTX
ゼロから始める自作 CPU 入門
by
Hirotaka Kawata
PDF
CPU / GPU高速化セミナー!性能モデルの理論と実践:実践編
by
Fixstars Corporation
PDF
FPGAによる大規模データ処理の高速化
by
Kazunori Sato
Vivado hls勉強会5(axi4 stream)
by
marsee101
Vivado hls勉強会1(基礎編)
by
marsee101
ACRi HLSチャレンジ 高速化テクニック紹介
by
Jun Ando
「FPGA 開発入門:FPGA を用いたエッジ AI の高速化手法を学ぶ」
by
直久 住川
いまさら聞けないarmを使ったNEONの基礎と活用事例
by
Fixstars Corporation
ゼロから始める自作 CPU 入門
by
Hirotaka Kawata
CPU / GPU高速化セミナー!性能モデルの理論と実践:実践編
by
Fixstars Corporation
FPGAによる大規模データ処理の高速化
by
Kazunori Sato
What's hot
PDF
Vivado hlsのシミュレーションとhlsストリーム
by
marsee101
PDF
Vivado hls勉強会2(レジスタの挿入とpipelineディレクティブ)
by
marsee101
PDF
ACRiウェビナー:岩渕様ご講演資料
by
直久 住川
PDF
高位合成ツールVivado hlsのopen cv対応
by
marsee101
PDF
ARM CPUにおけるSIMDを用いた高速計算入門
by
Fixstars Corporation
PDF
2値化CNN on FPGAでGPUとガチンコバトル(公開版)
by
Hiroki Nakahara
PDF
いまさら聞けない!CUDA高速化入門
by
Fixstars Corporation
PDF
Zynq mp勉強会資料
by
一路 川染
PDF
CUDAのアセンブリ言語基礎のまとめ PTXとSASSの概説
by
Takateru Yamagishi
PDF
Magnum IO GPUDirect Storage 最新情報
by
NVIDIA Japan
PDF
開発者が語る NVIDIA cuQuantum SDK
by
NVIDIA Japan
PDF
ZynqMPのブートとパワーマネージメント : (ZynqMP Boot and Power Management)
by
Mr. Vengineer
PPTX
AVX-512(フォーマット)詳解
by
MITSUNARI Shigeo
PDF
Sw技術者に送るfpga入門
by
直久 住川
PPTX
テストコードの DRY と DAMP
by
Yusuke Kagata
PDF
10分で分かるLinuxブロックレイヤ
by
Takashi Hoshino
PDF
20111015 勉強会 (PCIe / SR-IOV)
by
Kentaro Ebisawa
PPTX
LUT-Network その後の話(2022/05/07)
by
ryuz88
PDF
Gpu vs fpga
by
Yukitaka Takemura
PDF
ZynqMPのQEMU
by
Mr. Vengineer
Vivado hlsのシミュレーションとhlsストリーム
by
marsee101
Vivado hls勉強会2(レジスタの挿入とpipelineディレクティブ)
by
marsee101
ACRiウェビナー:岩渕様ご講演資料
by
直久 住川
高位合成ツールVivado hlsのopen cv対応
by
marsee101
ARM CPUにおけるSIMDを用いた高速計算入門
by
Fixstars Corporation
2値化CNN on FPGAでGPUとガチンコバトル(公開版)
by
Hiroki Nakahara
いまさら聞けない!CUDA高速化入門
by
Fixstars Corporation
Zynq mp勉強会資料
by
一路 川染
CUDAのアセンブリ言語基礎のまとめ PTXとSASSの概説
by
Takateru Yamagishi
Magnum IO GPUDirect Storage 最新情報
by
NVIDIA Japan
開発者が語る NVIDIA cuQuantum SDK
by
NVIDIA Japan
ZynqMPのブートとパワーマネージメント : (ZynqMP Boot and Power Management)
by
Mr. Vengineer
AVX-512(フォーマット)詳解
by
MITSUNARI Shigeo
Sw技術者に送るfpga入門
by
直久 住川
テストコードの DRY と DAMP
by
Yusuke Kagata
10分で分かるLinuxブロックレイヤ
by
Takashi Hoshino
20111015 勉強会 (PCIe / SR-IOV)
by
Kentaro Ebisawa
LUT-Network その後の話(2022/05/07)
by
ryuz88
Gpu vs fpga
by
Yukitaka Takemura
ZynqMPのQEMU
by
Mr. Vengineer
Similar to ACRiウェビナー:小野様ご講演資料
PDF
Vivado hls勉強会4(axi4 master)
by
marsee101
PDF
Vivado hls勉強会3(axi4 lite slave)
by
marsee101
PPTX
Zynq + Vivado HLS入門
by
narusugimoto
PPTX
研究者のための Python による FPGA 入門
by
ryos36
PDF
Pynqでカメラ画像をリアルタイムfastx コーナー検出
by
marsee101
PDF
ソフトウェア技術者から見たFPGAの魅力と可能性
by
Kenichiro MITSUDA
PDF
FPGAをロボット(ROS)で「やわらかく」使うには
by
Hideki Takase
PDF
私のファミコンのfpsは530000です。もちろんフルパワーで(以下略
by
Hiroki Nakahara
PDF
ZytleBot: ROSベースの自律移動ロボットへのFPGAの統合に向けて
by
Hideki Takase
PDF
ソフトウェアエンジニアと高位合成
by
Kenichiro MITSUDA
PDF
ACRiルーム副室長_安藤様_講演資料
by
直久 住川
PDF
DAS_202109
by
Takefumi MIYOSHI
PDF
Acri webn04 lt_iwi_配布
by
直久 住川
PDF
RISC-V introduction for SIG SDR in CQ 2019.07.29
by
Takefumi MIYOSHI
PDF
Synthesijer zynq qs_20150316
by
Takefumi MIYOSHI
PDF
ACRi HLSチャレンジ紹介
by
Jun Ando
PDF
Synthesijer.Scala (PROSYM 2015)
by
Takefumi MIYOSHI
PDF
2012研究室紹介(大川)
by
猛 大川
PDF
Ptt391
by
Takefumi MIYOSHI
PDF
Slide
by
Takefumi MIYOSHI
Vivado hls勉強会4(axi4 master)
by
marsee101
Vivado hls勉強会3(axi4 lite slave)
by
marsee101
Zynq + Vivado HLS入門
by
narusugimoto
研究者のための Python による FPGA 入門
by
ryos36
Pynqでカメラ画像をリアルタイムfastx コーナー検出
by
marsee101
ソフトウェア技術者から見たFPGAの魅力と可能性
by
Kenichiro MITSUDA
FPGAをロボット(ROS)で「やわらかく」使うには
by
Hideki Takase
私のファミコンのfpsは530000です。もちろんフルパワーで(以下略
by
Hiroki Nakahara
ZytleBot: ROSベースの自律移動ロボットへのFPGAの統合に向けて
by
Hideki Takase
ソフトウェアエンジニアと高位合成
by
Kenichiro MITSUDA
ACRiルーム副室長_安藤様_講演資料
by
直久 住川
DAS_202109
by
Takefumi MIYOSHI
Acri webn04 lt_iwi_配布
by
直久 住川
RISC-V introduction for SIG SDR in CQ 2019.07.29
by
Takefumi MIYOSHI
Synthesijer zynq qs_20150316
by
Takefumi MIYOSHI
ACRi HLSチャレンジ紹介
by
Jun Ando
Synthesijer.Scala (PROSYM 2015)
by
Takefumi MIYOSHI
2012研究室紹介(大川)
by
猛 大川
Ptt391
by
Takefumi MIYOSHI
Slide
by
Takefumi MIYOSHI
More from 直久 住川
PDF
第9回ACRiウェビナー_セック/岩渕様ご講演資料
by
直久 住川
PDF
第9回ACRiウェビナー_日立/島田様ご講演資料
by
直久 住川
PDF
第11回ACRiウェビナー_東工大/坂本先生ご講演資料
by
直久 住川
PDF
公開用_講演資料_SCSK.pdf
by
直久 住川
PDF
DSF実行委員長_酒井様_講演資料
by
直久 住川
PDF
第11回ACRiウェビナー_インテル/竹村様ご講演資料
by
直久 住川
PDF
AMD_Xilinx_AI_VCK5000_20220602R1.pdf
by
直久 住川
PDF
20th ACRi Webinar - Kyoto SU Oura-san Presentation
by
直久 住川
PDF
20th ACRi Webiner - Presentation by MathWorks
by
直久 住川
PDF
20th ACRi Webinar - Kyoto SU Presentation
by
直久 住川
PDF
VCK5000_Webiner_GIGABYTE様ご講演資料
by
直久 住川
PDF
17th_ACRi_Webinar_Sadasue-san_Slide_20240724
by
直久 住川
PDF
ACRi事務局_住川_講演資料
by
直久 住川
PDF
18th ACRi Webinar : Presentation Slide ; Fukuda-san, ChipTip Technology
by
直久 住川
PDF
16th_ACRi_Webinar_Kumamoto-Univ_Okawa_20240308.pdf
by
直久 住川
PDF
VCK5000_Webiner_Fixstars様ご講演資料
by
直久 住川
PDF
16th_ACRi_Webiner_SEC_Takebe_20240308.pdf
by
直久 住川
PDF
ACRi-Webinar_Feb2023_agenda_20230225.pdf
by
直久 住川
PDF
2022-12-17-room.pdf
by
直久 住川
PDF
18th ACRi Webinar : Presentation Material - Prof. Yamaguchi
by
直久 住川
第9回ACRiウェビナー_セック/岩渕様ご講演資料
by
直久 住川
第9回ACRiウェビナー_日立/島田様ご講演資料
by
直久 住川
第11回ACRiウェビナー_東工大/坂本先生ご講演資料
by
直久 住川
公開用_講演資料_SCSK.pdf
by
直久 住川
DSF実行委員長_酒井様_講演資料
by
直久 住川
第11回ACRiウェビナー_インテル/竹村様ご講演資料
by
直久 住川
AMD_Xilinx_AI_VCK5000_20220602R1.pdf
by
直久 住川
20th ACRi Webinar - Kyoto SU Oura-san Presentation
by
直久 住川
20th ACRi Webiner - Presentation by MathWorks
by
直久 住川
20th ACRi Webinar - Kyoto SU Presentation
by
直久 住川
VCK5000_Webiner_GIGABYTE様ご講演資料
by
直久 住川
17th_ACRi_Webinar_Sadasue-san_Slide_20240724
by
直久 住川
ACRi事務局_住川_講演資料
by
直久 住川
18th ACRi Webinar : Presentation Slide ; Fukuda-san, ChipTip Technology
by
直久 住川
16th_ACRi_Webinar_Kumamoto-Univ_Okawa_20240308.pdf
by
直久 住川
VCK5000_Webiner_Fixstars様ご講演資料
by
直久 住川
16th_ACRi_Webiner_SEC_Takebe_20240308.pdf
by
直久 住川
ACRi-Webinar_Feb2023_agenda_20230225.pdf
by
直久 住川
2022-12-17-room.pdf
by
直久 住川
18th ACRi Webinar : Presentation Material - Prof. Yamaguchi
by
直久 住川
Recently uploaded
PDF
サーバーサイド Kotlin を社内で普及させてみた - Server-Side Kotlin Night 2025
by
Hirotaka Kawata
PPTX
【ASW22-01】STAMP:STPAロスシナリオの発想・整理支援ツールの開発 ~astah* System Safetyによる構造化・階層化機能の実装...
by
csgy24013
PPTX
「グローバルワン全員経営」の実践を通じて進化し続けるファーストリテイリングのアーキテクチャ
by
Fast Retailing Co., Ltd.
PDF
0.0001秒の攻防!?快適な運転を支えるリアルタイム制御と組み込みエンジニアの実践知【DENSO Tech Night 第四夜】
by
dots.
PDF
Kubernetes Release Team Release Signal Role について ~Kubernetes Meetup Tokyo #72~
by
Keisuke Ishigami
PDF
Rin Ukai_即興旅行の誘発を目的とした口コミ情報に基づく雰囲気キーワード_EC2025.pdf
by
Matsushita Laboratory
PDF
Nanami Doikawa_寄り道の誘発を目的とした旅行写真からのスポット印象語彙の推定に関する基礎検討_EC2025
by
Matsushita Laboratory
サーバーサイド Kotlin を社内で普及させてみた - Server-Side Kotlin Night 2025
by
Hirotaka Kawata
【ASW22-01】STAMP:STPAロスシナリオの発想・整理支援ツールの開発 ~astah* System Safetyによる構造化・階層化機能の実装...
by
csgy24013
「グローバルワン全員経営」の実践を通じて進化し続けるファーストリテイリングのアーキテクチャ
by
Fast Retailing Co., Ltd.
0.0001秒の攻防!?快適な運転を支えるリアルタイム制御と組み込みエンジニアの実践知【DENSO Tech Night 第四夜】
by
dots.
Kubernetes Release Team Release Signal Role について ~Kubernetes Meetup Tokyo #72~
by
Keisuke Ishigami
Rin Ukai_即興旅行の誘発を目的とした口コミ情報に基づく雰囲気キーワード_EC2025.pdf
by
Matsushita Laboratory
Nanami Doikawa_寄り道の誘発を目的とした旅行写真からのスポット印象語彙の推定に関する基礎検討_EC2025
by
Matsushita Laboratory
ACRiウェビナー:小野様ご講演資料
1.
HLSは私の救世主 (使わなきゃ損です…) FPGAの部屋の中の人 小野 雅晃 1
2.
自己紹介(1/2) • 筑波大学シニアスタッフ技術職員、63歳の爺さん • 1980年に大学卒業 •
大学卒業後に某F社の子会社に入社 • 3年後筑波大学に技術職員として転職 • 教授から声がかかり研究のお手伝い(1995?) • FPGAを使い始める • 初めはAltrea(現在はIntel)を使用 • Xilinxに乗り換える • 来年度は週4日勤務予定 2
3.
FPGAの部屋のブログ • 2005年にスタート • 現在5,500記事位 •
664万アクセス • カテゴリ数は167個 • Vitis HLS (77) • Vitis_Vision (44) • NNgen (14)などなど • https://marsee101.blog.fc2.com/ • FPGA友達がいないので、寂しくて書き始めた • 途中からは脳の外部記憶として書いた 3
4.
Vitis HLS, Vivado
HLSとは? • Xilinx社の高位合成ツール • C、C++からVHDL、Verilog HDLに合成しIPを生成す るツール • 機能を検証するための2種類のシミュレーション • Cシミュレーション • C/RTL協調シミュレーション 4
5.
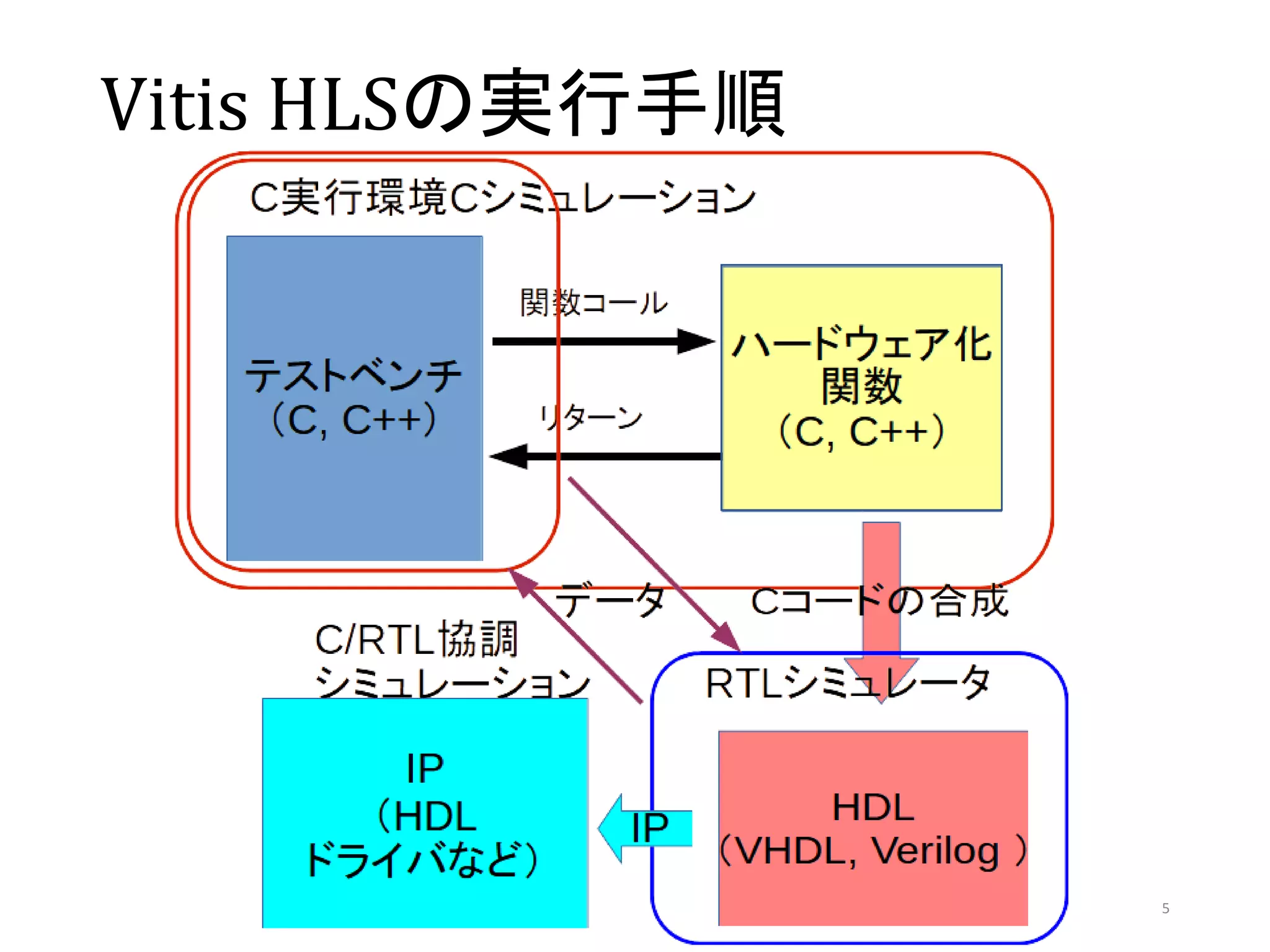
Vitis HLSの実行手順 5
6.
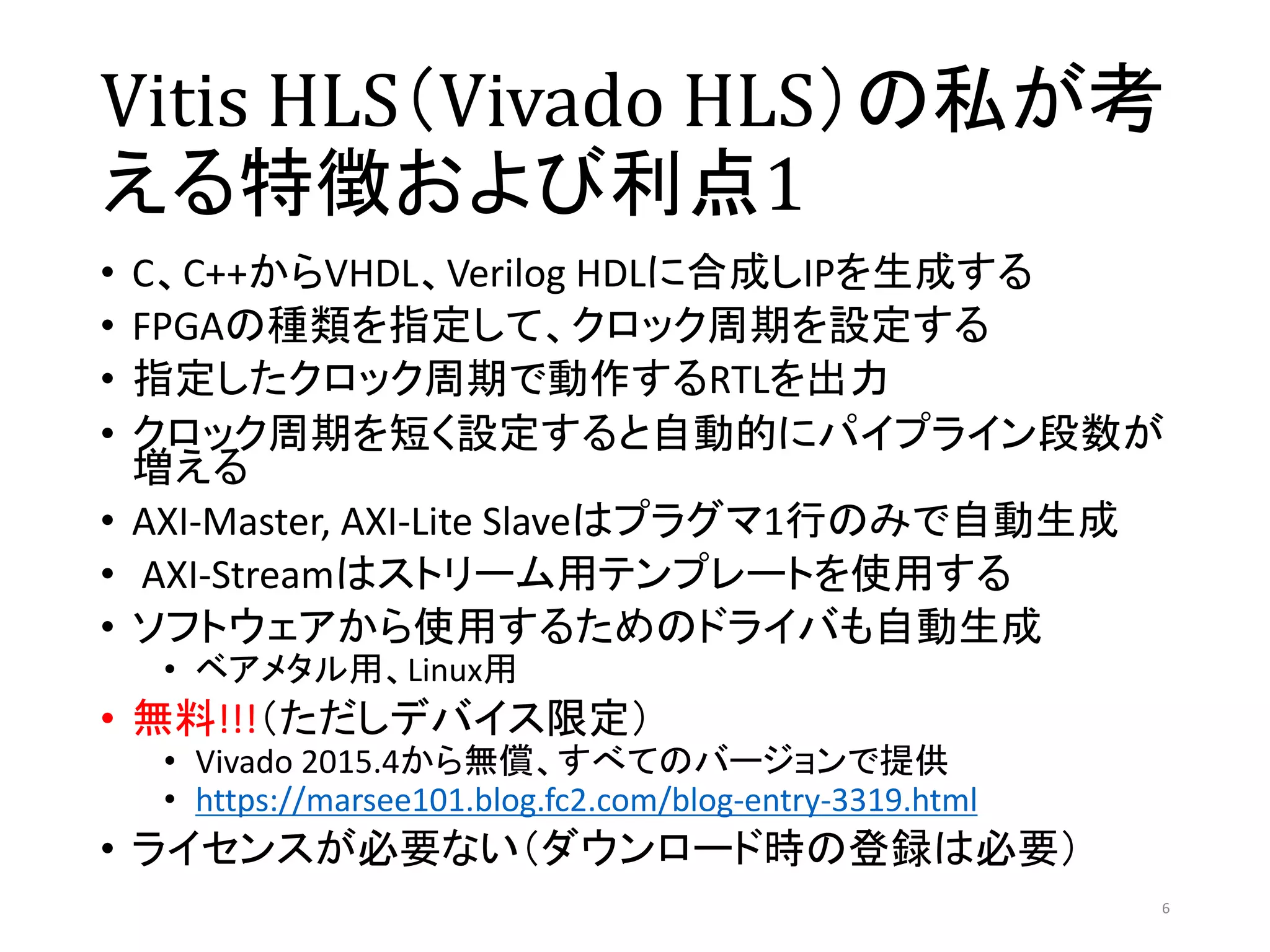
Vitis HLS(Vivado HLS)の私が考 える特徴および利点1 •
C、C++からVHDL、Verilog HDLに合成しIPを生成する • FPGAの種類を指定して、クロック周期を設定する • 指定したクロック周期で動作するRTLを出力 • クロック周期を短く設定すると自動的にパイプライン段数が 増える • AXI-Master, AXI-Lite Slaveはプラグマ1行のみで自動生成 • AXI-Streamはストリーム用テンプレートを使用する • ソフトウェアから使用するためのドライバも自動生成 • ベアメタル用、Linux用 • 無料!!!(ただしデバイス限定) • Vivado 2015.4から無償、すべてのバージョンで提供 • https://marsee101.blog.fc2.com/blog-entry-3319.html • ライセンスが必要ない(ダウンロード時の登録は必要) 6
7.
Vitis HLS(Vivado HLS)の私が考 える特徴および利点2 •
制御部(ステートマシン)を書く必要が無いということは、 ステートマシンに起因するバグが無くなる • つまりHDL書くよりもバグが少なくなる • 機能はCベースのシミュレーションで検証可能 • デバック時間が短い • Eclipseのデバッカーでデバックできる • HDLを合成したらRTLシミュレーションでHDLを検証 (C/RTL協調シミュレーション) • CテストベンチからRTLシミュレータにデータを入力 • RTLシミュレーション • RTLシミュレーションの結果をCテストベンチに返して検証 • タイミング波形を確認できる 7
8.
HLSの欠点 • タイミングの決まっている信号がある回路 • インターフェースIP •
カメラ・インターフェースIP • ビットマップ・ディスプレイ・コントローラIP • <例> A信号の3クロック後にB信号を1にする必要がある • クロックに同期していない信号がある • シンクロナイザーIP(xpm_cdc)を前段に使用 • 複数クロックがある回路 8
9.
私のVivado HLS, Vitis
HLS使用経 緯 • 2013年8月からVivado HLS 2013.2を使い始めた • https://marsee101.blog.fc2.com/blog-entry-2563.html • Vivado HLS 2013.4で作成したラプラシアンフィルタ 画像はソフトウェア画像と比べて画像が違ってい た • https://marsee101.blog.fc2.com/blog-entry-2737.html • Vivado HLS 2014.1でソフトウェアとラプラシアンフィ ルタ画像が同一になった • バグが解消されたようだ • Vivado HLSが使えるようになった • https://marsee101.blog.fc2.com/blog-entry-2800.html 9
10.
Vivado HLSからVitis HLSへ •
Vivado HLSを使用してきたが2020.1からVitis HLSへバト ンタッチ • 大体Vivado HLSと同じだが、変更されている部分も • AXI4マスター・インターフェース作成したときのアドレスだが、 64ビット・アドレスがデフォルトになった • ハードウェア化する関数内でのストリームの扱い • Vitis HLSの方がデフォルトの状態でチューニングされている (レイテンシが短い) • 初心者は特にVitis HLSをお勧めする • その他、いろいろ変更有り • Vitis HLS 移行ガイド UG1391 (v2020.2) 2020 年 11 月 24 日参照 • https://www.xilinx.com/support/documentation/sw_manuals _j/xilinx2020_2/ug1391-vitis-hls-migration-guide.pdf 10
11.
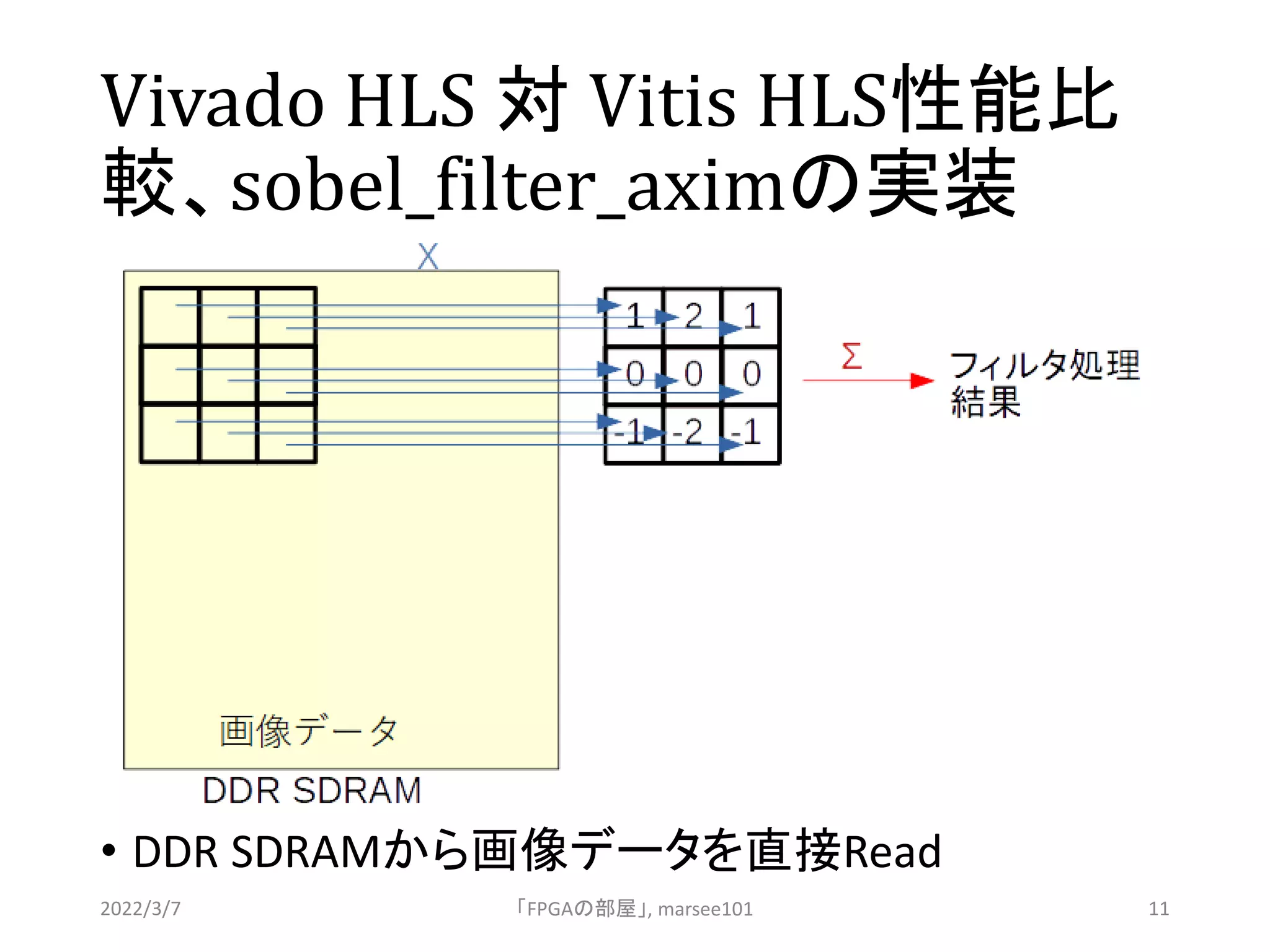
Vivado HLS 対
Vitis HLS性能比 較、sobel_filter_aximの実装 • DDR SDRAMから画像データを直接Read 2022/3/7 「FPGAの部屋」, marsee101 11
12.
Vivado HLS対Vitis HLS(ソーベ ル・フィルタ) 12 int
sobel_filter_axim(volatile int32_t *cam_fb, volatile int32_t *sobel_fb){ #pragma HLS INTERFACE m_axi depth=3072 port=sobel_fb offset=slave #pragma HLS INTERFACE m_axi depth=3072 port=cam_fb offset=slave #pragma HLS INTERFACE s_axilite port=return int32_t sobel_val, sobel_h_val, sobel_v_val; int32_t pix[3][3]; LOOP_Y: for(int y=0; y<(DISPLAY_HIGHT-2); y++){ LOOP_X: for(int x=0; x<(DISPLAY_WIDTH-2); x++){ LOOP1: for(int i=0; i<3; i++){ LOOP2: for(int j=0; j<3; j++){ pix[i][j] = conv_rgb2y(cam_fb[(y+i)*DISPLAY_WIDTH+(x+j)]); } } sobel_h_val = sobel_fil(HORIZONTAL, pix[0][0], pix[0][1], pix[0][2], pix[1][0], pix[1][1], pix[1][2], pix[2][0], pix[2][1], pix[2][2]); sobel_v_val = sobel_fil(VERTICAL, pix[0][0], pix[0][1], pix[0][2], pix[1][0], pix[1][1], pix[1][2], pix[2][0], pix[2][1], pix[2][2]); sobel_val = square_root8(sobel_h_val*sobel_h_val + sobel_v_val*sobel_v_val); sobel_fb[y*(DISPLAY_WIDTH-2)+x] = (sobel_val<<16)+(sobel_val<<8)+sobel_val; // 通常出力 } }
13.
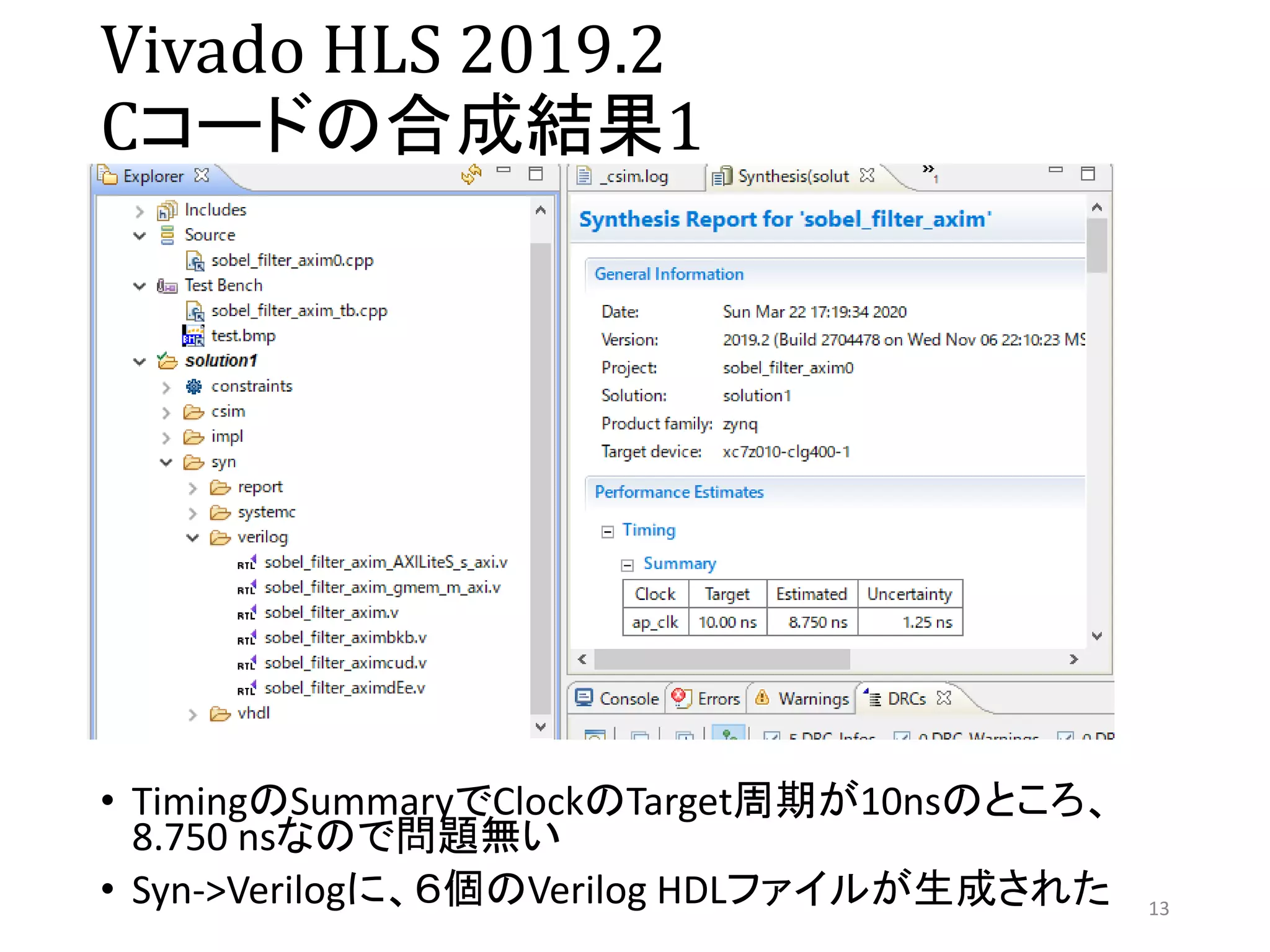
Vivado HLS 2019.2 Cコードの合成結果1 •
TimingのSummaryでClockのTarget周期が10nsのところ、 8.750 nsなので問題無い • Syn->Verilogに、6個のVerilog HDLファイルが生成された 13
14.
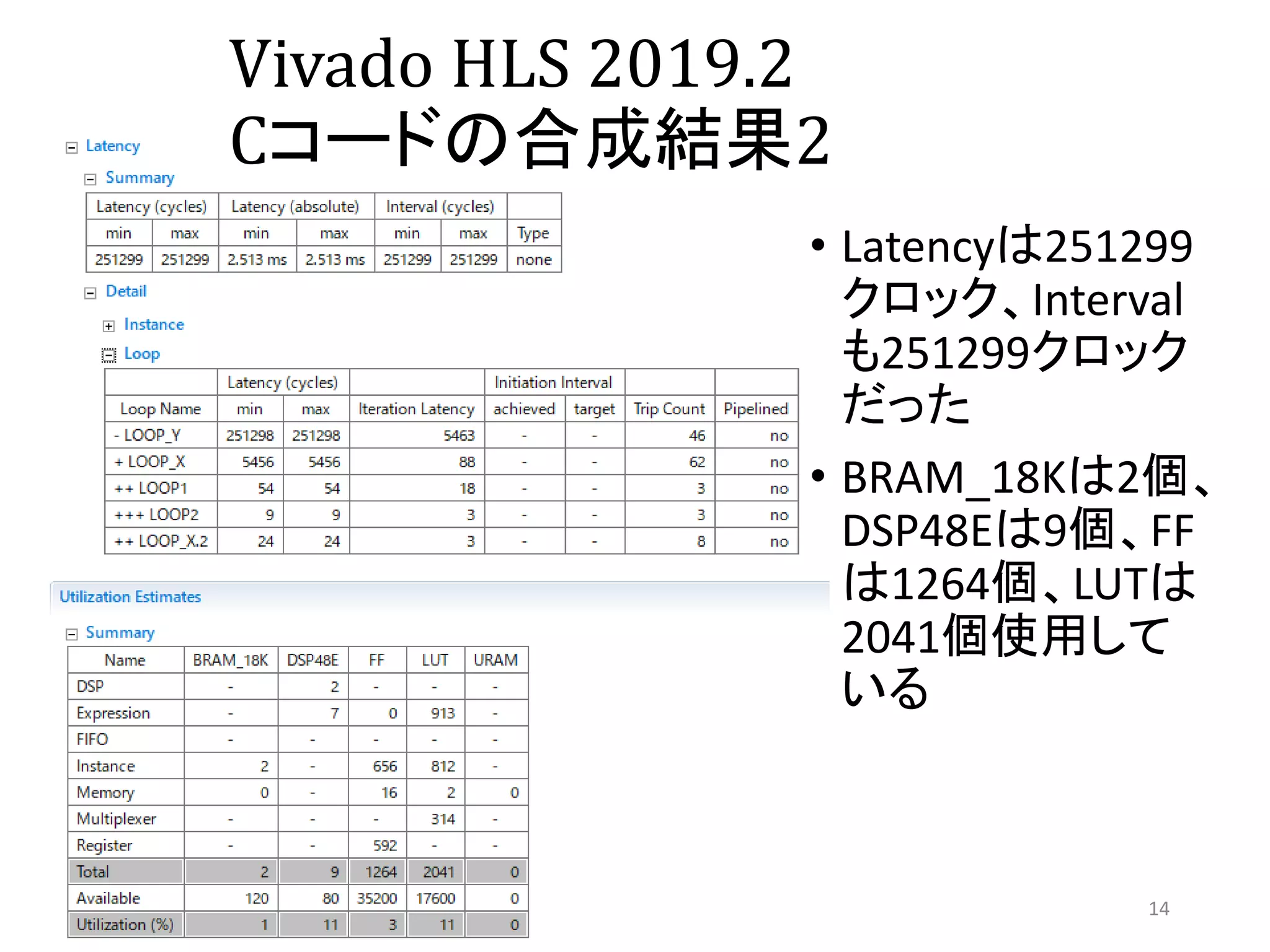
Vivado HLS 2019.2 Cコードの合成結果2 •
Latencyは251299 クロック、Interval も251299クロック だった • BRAM_18Kは2個、 DSP48Eは9個、FF は1264個、LUTは 2041個使用して いる 14
15.
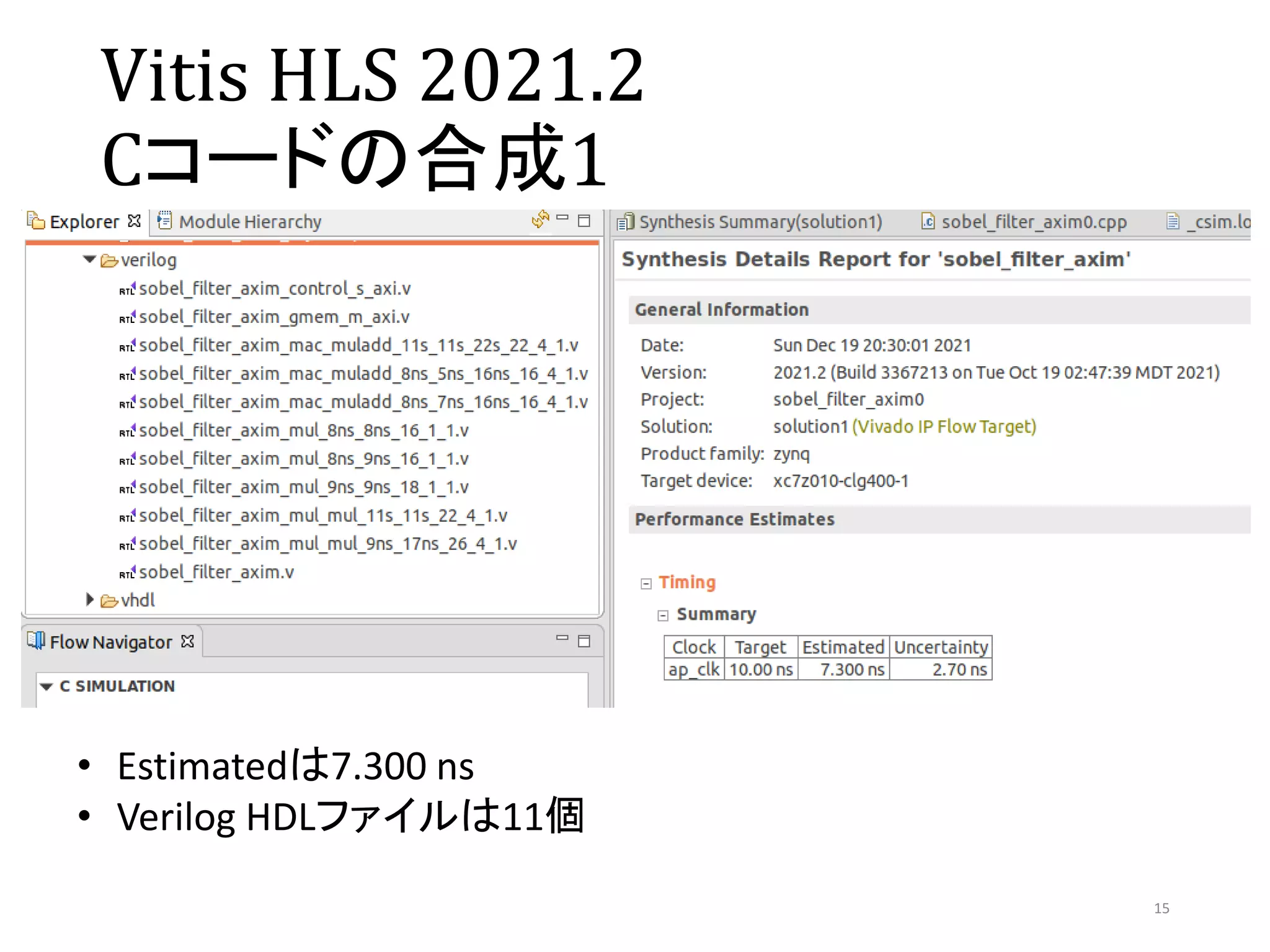
Vitis HLS 2021.2 Cコードの合成1 15 •
Estimatedは7.300 ns • Verilog HDLファイルは11個
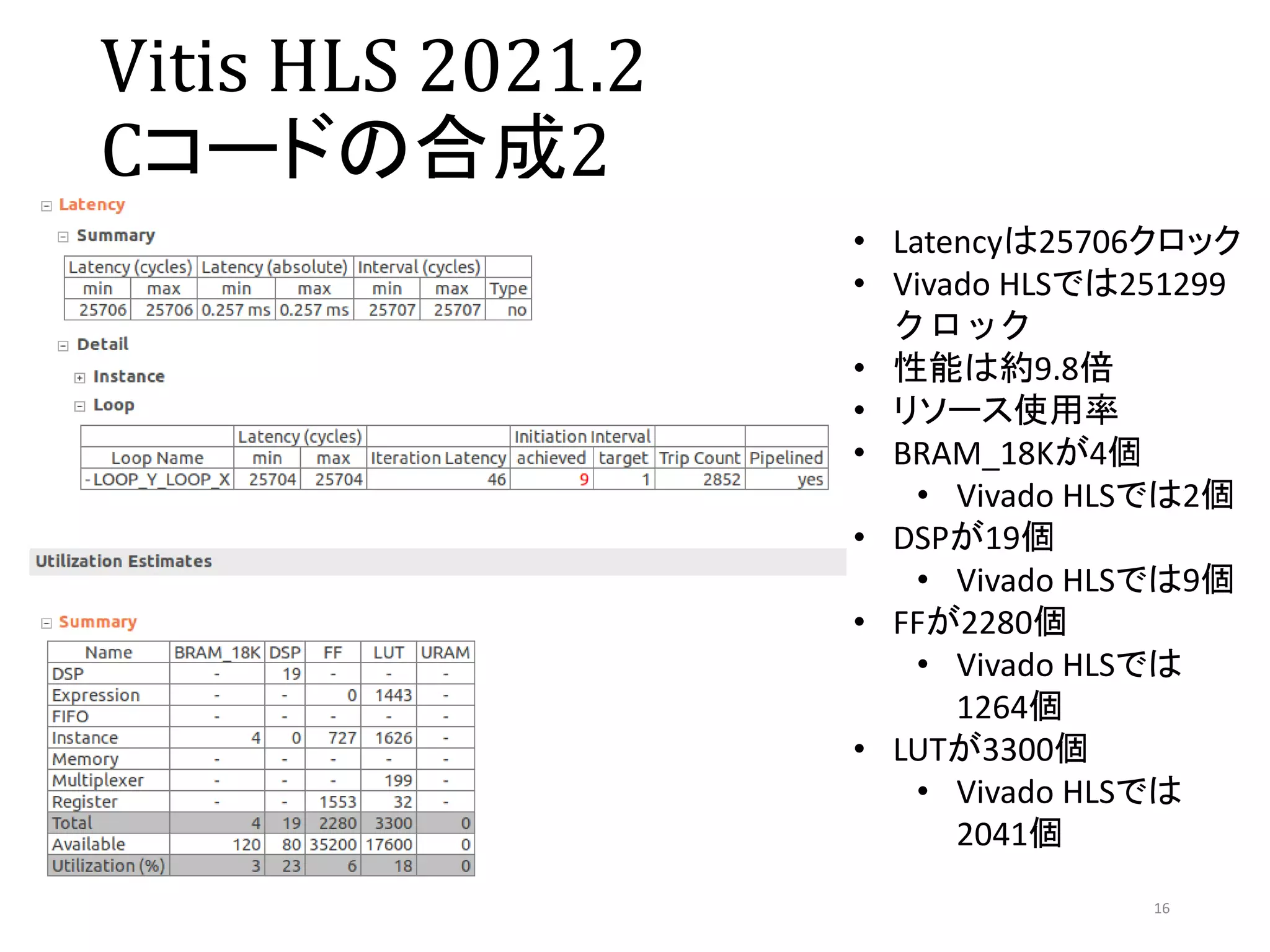
16.
16 Vitis HLS 2021.2 Cコードの合成2 •
Latencyは25706クロック • Vivado HLSでは251299 クロック • 性能は約9.8倍 • リソース使用率 • BRAM_18Kが4個 • Vivado HLSでは2個 • DSPが19個 • Vivado HLSでは9個 • FFが2280個 • Vivado HLSでは 1264個 • LUTが3300個 • Vivado HLSでは 2041個
17.
HLSを使うに当たってのモチベー ション • 以前はHDL、主にVHDLで回路を書いていた • 歳を取る毎に集中できる時間が減ってきた •
HDLだと制御部(ステートマシン)と機能を書くので、 時間がかかる • 歳をとっても回路を実装したい • そこで、HLSに目をつけた • 制御部を書く必要がないので、機能だけ書けば良い • 時短になる • HDLで1週間かかるところが1時間という場合も • 若い人が使っても時短になる 17
18.
Vitis HLS, Vivado
HLSに対する 私の熱い思い(本音) • 趣味or大学のお仕事でFPGAを使っているとシステムを 丸ごと(ハードもソフトも)自分1人で実装する • 科研費の実装は速くする必要がある • 実装は1年未満に… 6ヶ月位? • 歳とともにHDLを書けない、書くスピードが遅くなった • コードを書き始められない…引退が近い??? • そんなときにHLSでCコードを書いてIP実装 • 大幅なスピードアップ • Xilinxさん、Vivado HLS、Vitis HLSを無料にしてくれて本当 にありがとうございます! • Vitis HLS、Vivado HLSは私の救世主(使わなきゃ損です) 18
19.
カメラを使用した画像認識により 白線間走行及び隊列走行するロ ボットカー • 2016年度の科研費奨励研究 • (課題番号16H00383) •
ガボール・フィルタで白線を検出して白線間を走る ロボットカー • 先頭車両のマーカーを検出して隊列走行 19
20.
ロボットカーの構成 • Zybotのプラットフォームを利用した • Digilent社のZYBOボードを使用した全長30cm程度のロボット カー •
プラットフォームは使用しているが、ハード、ソフトとも独自開 発 • ZYBO(旧)ボード • Xilinx社のARMプロセッサ(Cortex-A9デュアル)+FPGAチップ • Zynq-7010 • 2つのCortex-A9(650MHz動作)でUbuntu14.04が動作 • ソフトウェア実装後にハードウェアにオフロードが簡単 に行える 20
21.
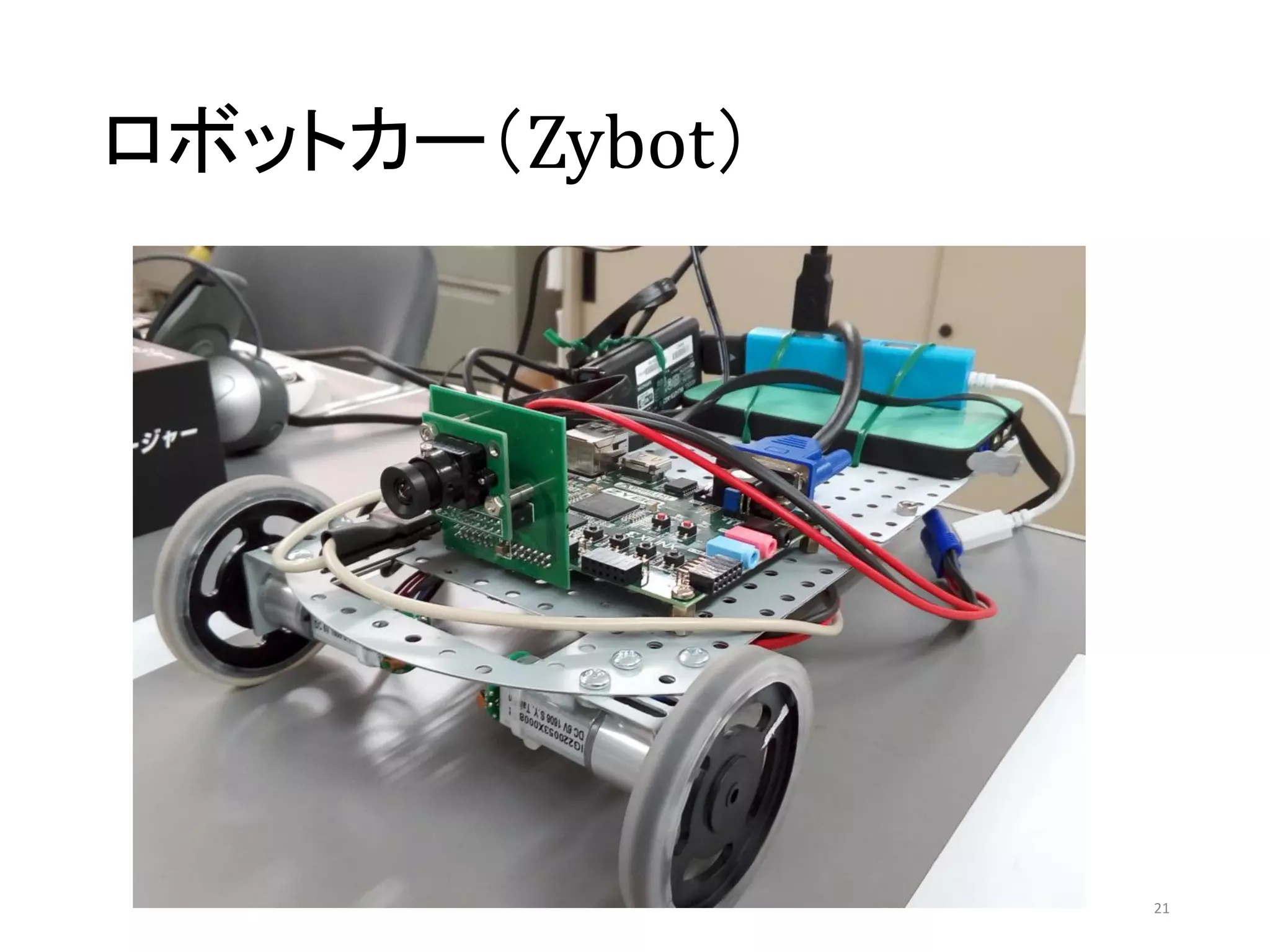
ロボットカー(Zybot) 21
22.
カメラを使用した画像認識により 白線間走行及び隊列走行するロ ボットカーの使用IP • 自作IP(9個) • Vivado
HLSで作成したIP(C言語で書いたIP) • モーター用PWM IP • モーター・モニターIP(モーターのパルス数をカウント) • 超音波センサ・インターフェースIP • ガボール・フィルタIP • ガボール・フィルタ用DMAC IP • ラプラシアンフィルタIP • RGB-HSV変換IP • ビットマップ・ディスプレイ・コントローラIP • カメラ・インターフェースIP • https://marsee101.web.fc2.com/white_line_detect.html 22
23.
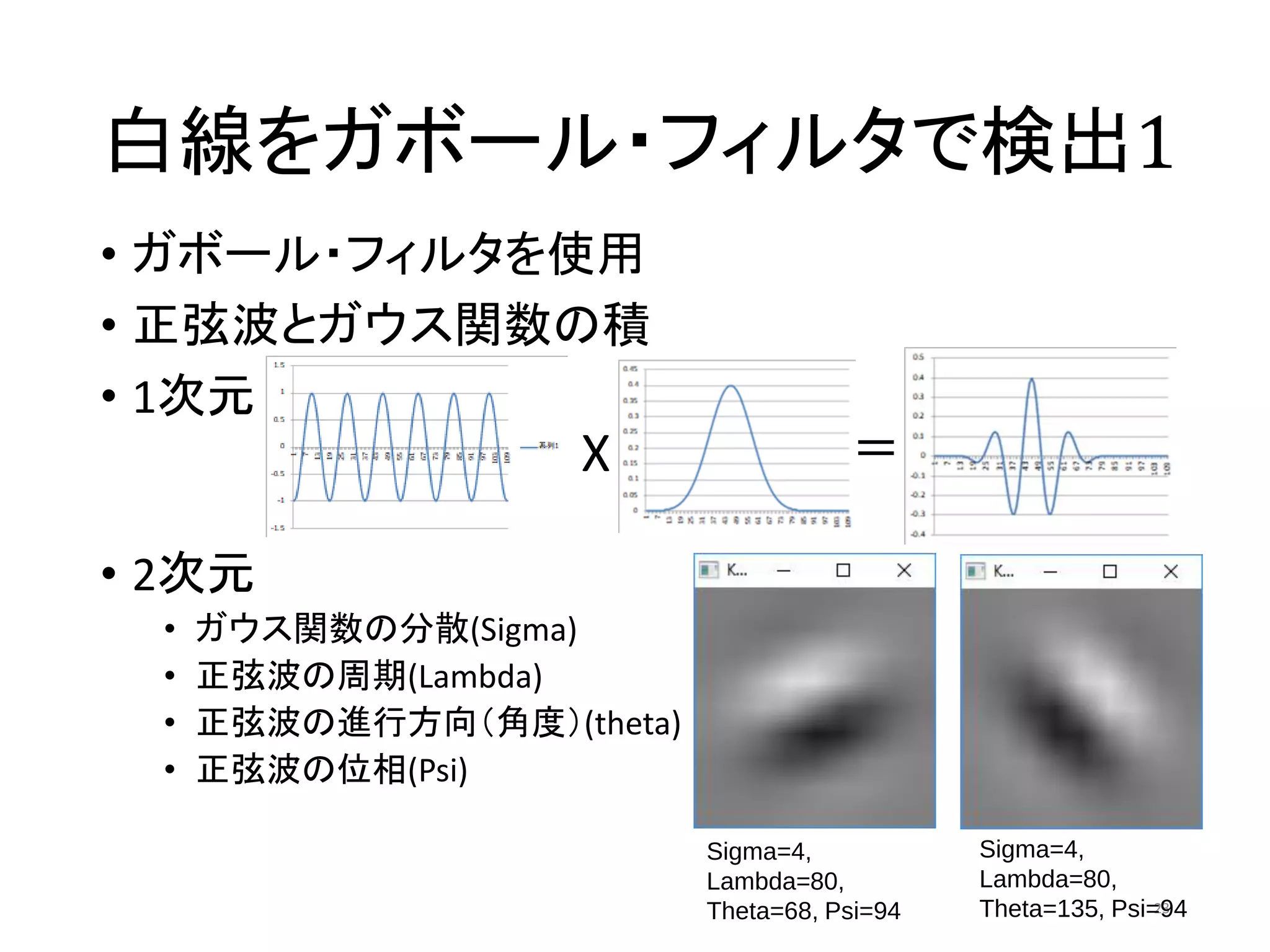
白線をガボール・フィルタで検出1 • ガボール・フィルタを使用 • 正弦波とガウス関数の積 •
1次元 • 2次元 • ガウス関数の分散(Sigma) • 正弦波の周期(Lambda) • 正弦波の進行方向(角度)(theta) • 正弦波の位相(Psi) 23 X = Sigma=4, Lambda=80, Theta=68, Psi=94 Sigma=4, Lambda=80, Theta=135, Psi=94
24.
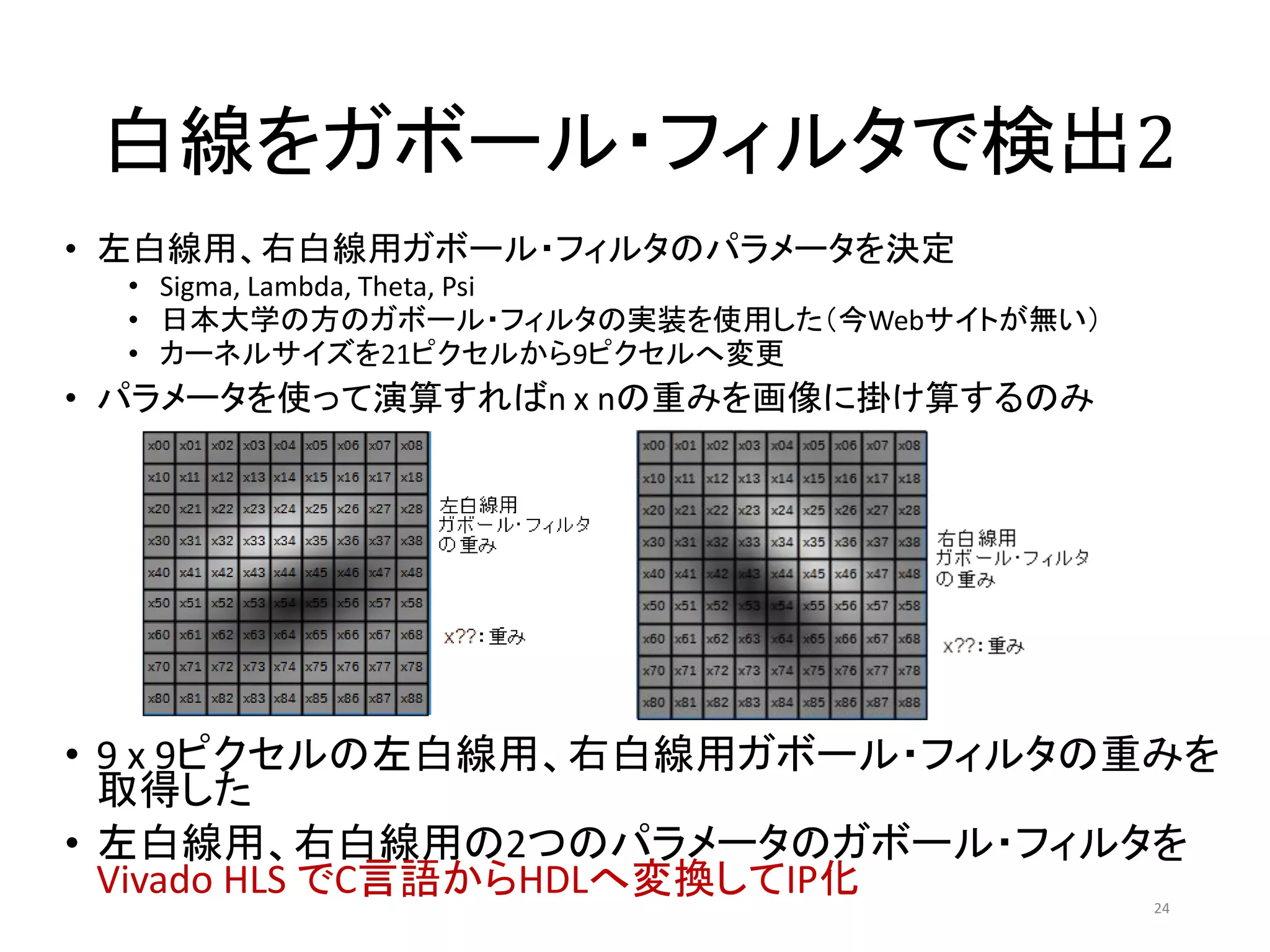
白線をガボール・フィルタで検出2 • 左白線用、右白線用ガボール・フィルタのパラメータを決定 • Sigma,
Lambda, Theta, Psi • 日本大学の方のガボール・フィルタの実装を使用した(今Webサイトが無い) • カーネルサイズを21ピクセルから9ピクセルへ変更 • パラメータを使って演算すればn x nの重みを画像に掛け算するのみ 24 • 9 x 9ピクセルの左白線用、右白線用ガボール・フィルタの重みを 取得した • 左白線用、右白線用の2つのパラメータのガボール・フィルタを Vivado HLS でC言語からHDLへ変換してIP化
25.
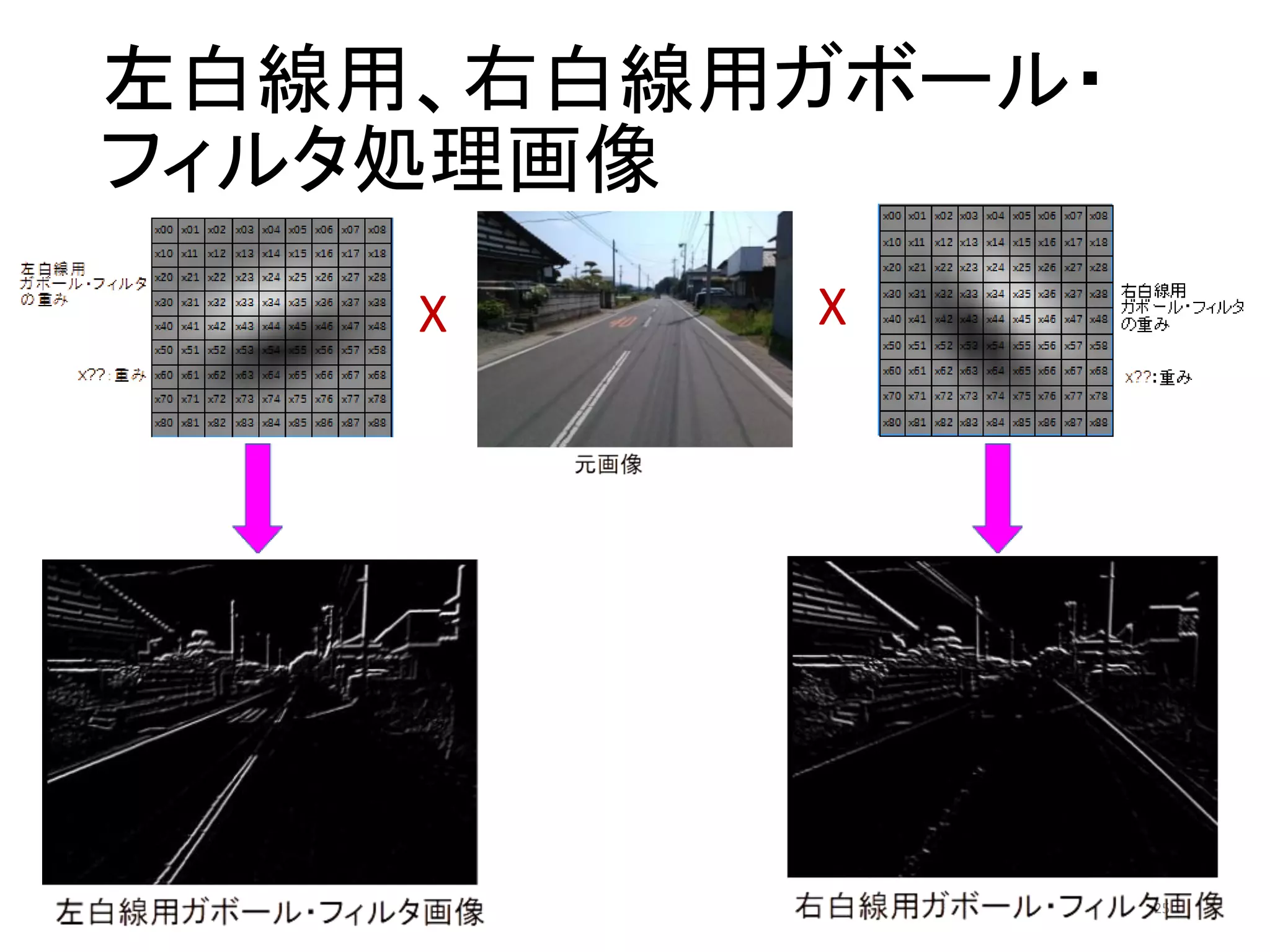
左白線用、右白線用ガボール・ フィルタ処理画像 25 X X
26.
ガボール・フィルタIPのソースコード 26 int Gabor_filter_lh(hls::stream<ap_axis<32,1,1,1> >&
ins, hls::stream<ap_axis<32,1,1,1> >& outs){ #pragma HLS INTERFACE axis port=ins #pragma HLS INTERFACE axis port=outs #pragma HLS INTERFACE s_axilite port=return ap_axis<32,1,1,1> pix; ap_axis<32,1,1,1> gabor; hls::LineBuffer<ARRAY_SIZE- 1, HORIZONTAL_PIXEL_WIDTH, int> linebuf; hls::Window<ARRAY_SIZE, ARRAY_SIZE, int> mbuf; int gray_pix, val, i, j, x, y; do { // user が 1になった時にフレームがスタートする ins >> pix; } while(pix.user == 0); for (y=0; y<VERTICAL_PIXEL_WIDTH; y++){ for (x=0; x<HORIZONTAL_PIXEL_WIDTH; x++){ #pragma HLS PIPELINE II=1 if (!(x==0 && y==0)) // 最初の入力はすでに入力されている ins >> pix; // AXI4-Stream からの入力 mbuf.shift_left(); // mbuf の列を1ビット左シフト for(i=ARRAY_SIZE-2; i>=0; --i){ mbuf.insert(linebuf(i,x), i+1, ARRAY_SIZE-1); } gray_pix = conv_rgb2y(pix.data); mbuf.insert(gray_pix, 0, ARRAY_SIZE-1); // LineBuffer の更新 linebuf.shift_down(x); linebuf.insert_bottom(gray_pix, x); // Gabor filter の演算 for (j=0, val=0; j<ARRAY_SIZE-1; j++){ for (i=0; i<ARRAY_SIZE-1; i++){ val += gabor_weight[j][i] * mbuf(ARRAY_SIZE-1-j,i); } } val = val/256; // 256倍してあるので、1/256して戻す if (val<0) //val = -val; // 絶対値 val = 0; // マイナスの値を0に丸める else if (val>255) val = 255; // Gabor filter・データの書き込み gabor.data = (val<<16)+(val<<8)+val; // 最初のARRAY_SIZE-1行とその他の行の最初のARRAY_SIZE- 1列は無効データなので0とする if (x<(ARRAY_SIZE-1) || y<(ARRAY_SIZE-1)) gabor.data = 0; if (x==0 && y==0) // 最初のデータでは、TUSERをアサートする gabor.user = 1; else gabor.user = 0; if (x == (HORIZONTAL_PIXEL_WIDTH-1)) // 行の最後 で TLAST をアサートする gabor.last = 1; else gabor.last = 0; outs << gabor; // AXI4-Stream へ出力 } } return(0); } https://marsee101.blog.fc2.com/b log-entry-3524.html
27.
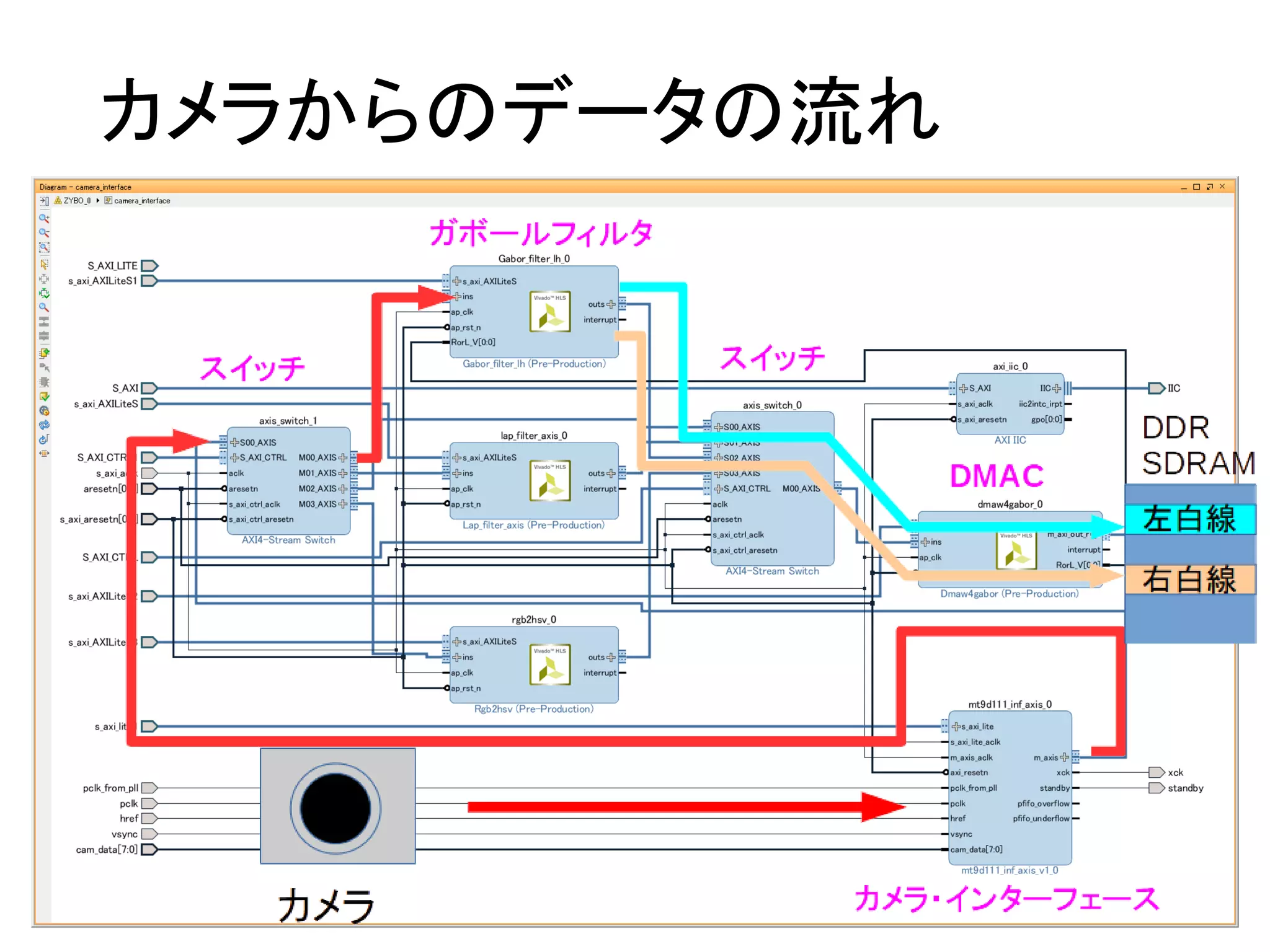
カメラからのデータの流れ 27
28.
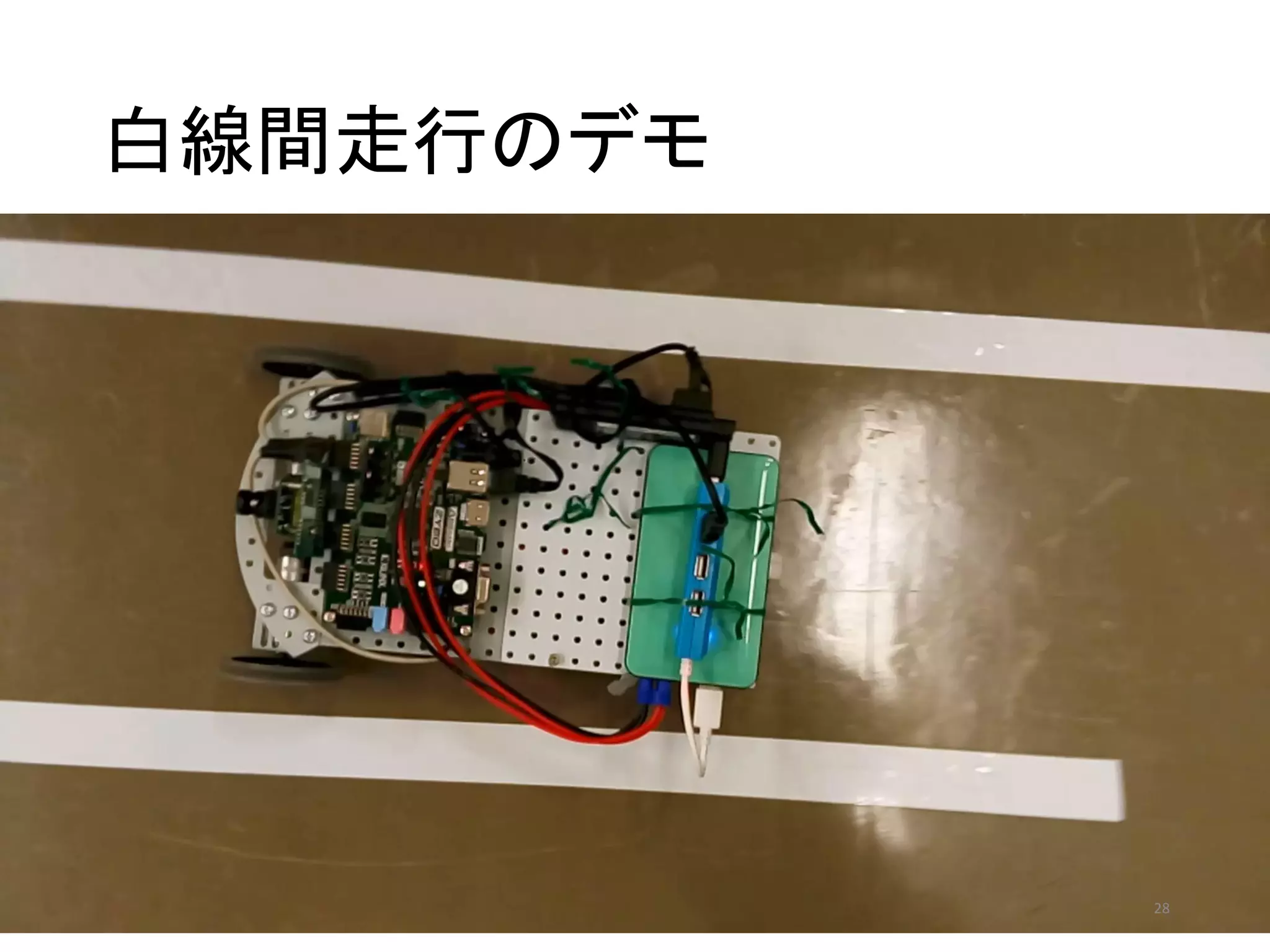
白線間走行のデモ 28
29.
カメラを使用した画像認識により 白線間走行及び隊列走行するロ ボットカーの使用IP • 自作IP(9個) • Vivado
HLSで作成したIP(C言語で書いたIP) • モーター用PWM IP • モーター・モニターIP(モーターのパルス数をカウント) • 超音波センサ・インターフェースIP • ガボール・フィルタIP • ガボール・フィルタ用DMAC IP • ラプラシアンフィルタIP • RGB-HSV変換IP • ビットマップ・ディスプレイ・コントローラIP • カメラ・インターフェースIP • https://marsee101.web.fc2.com/zybot.html 29
30.
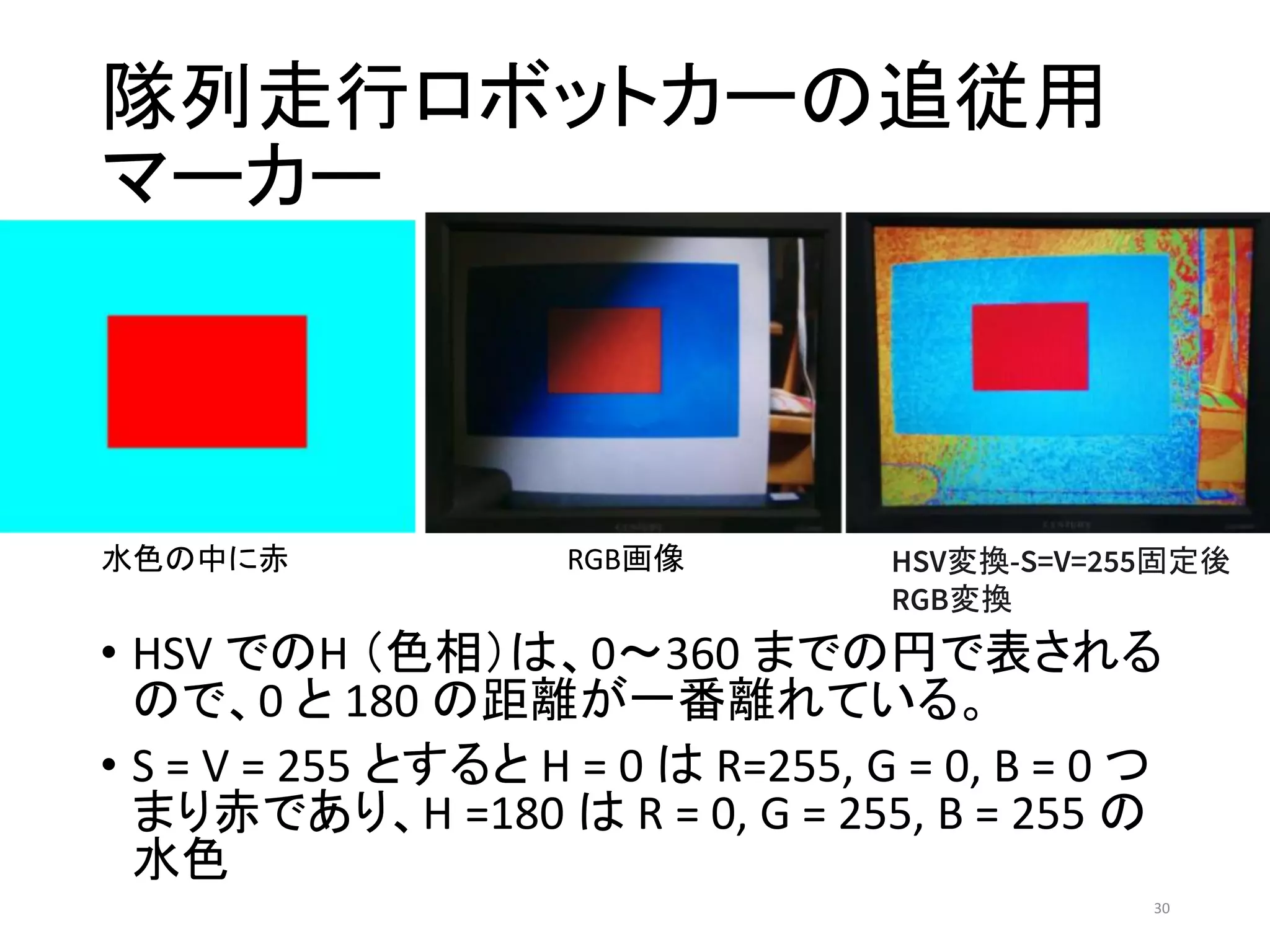
隊列走行ロボットカーの追従用 マーカー • HSV でのH
(色相)は、0~360 までの円で表される ので、0 と 180 の距離が一番離れている。 • S = V = 255 とすると H = 0 は R=255, G = 0, B = 0 つ まり赤であり、H =180 は R = 0, G = 255, B = 255 の 水色 30 水色の中に赤 RGB画像 HSV変換-S=V=255固定後 RGB変換
31.
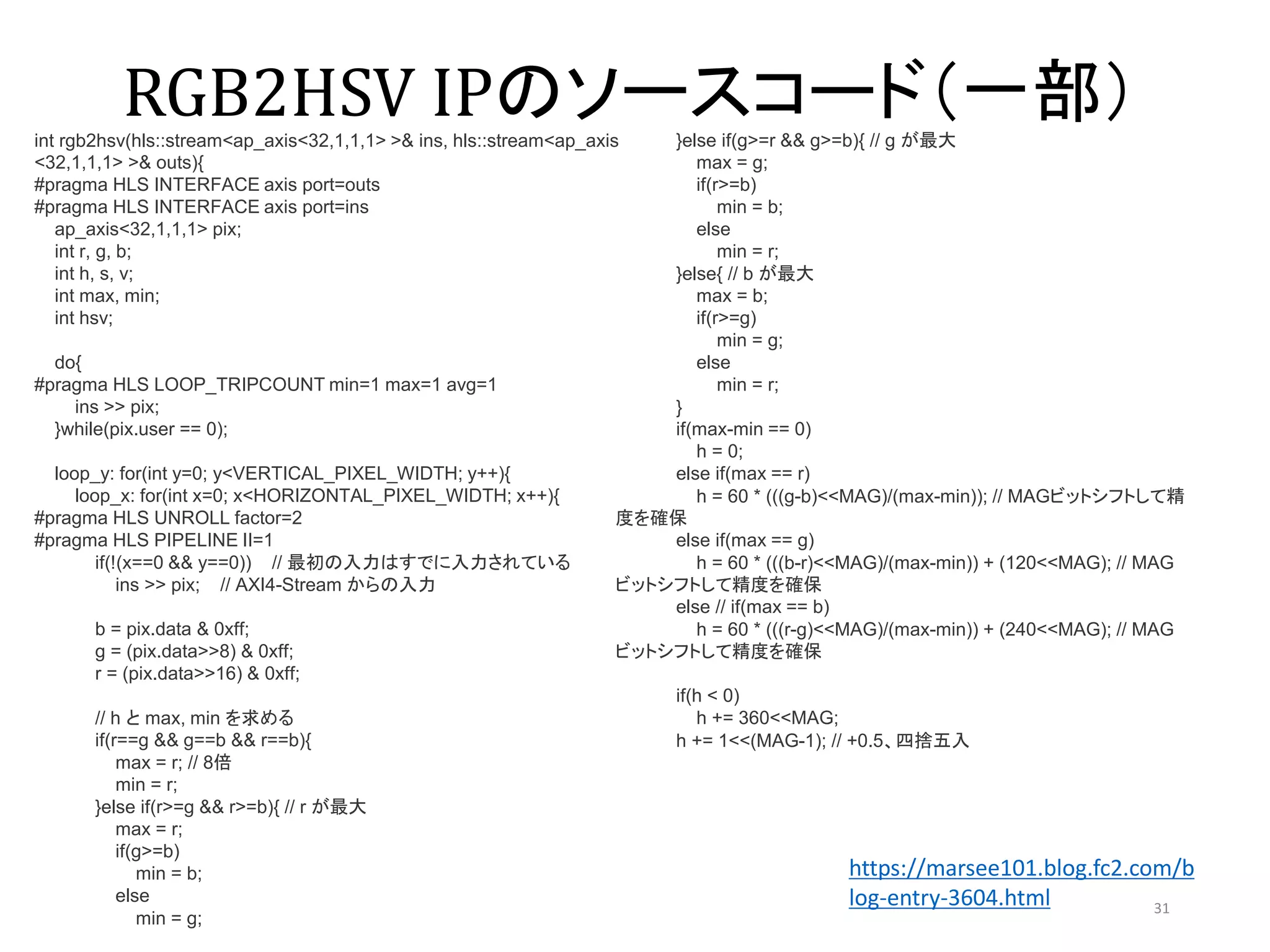
RGB2HSV IPのソースコード(一部) 31 int rgb2hsv(hls::stream<ap_axis<32,1,1,1>
>& ins, hls::stream<ap_axis <32,1,1,1> >& outs){ #pragma HLS INTERFACE axis port=outs #pragma HLS INTERFACE axis port=ins ap_axis<32,1,1,1> pix; int r, g, b; int h, s, v; int max, min; int hsv; do{ #pragma HLS LOOP_TRIPCOUNT min=1 max=1 avg=1 ins >> pix; }while(pix.user == 0); loop_y: for(int y=0; y<VERTICAL_PIXEL_WIDTH; y++){ loop_x: for(int x=0; x<HORIZONTAL_PIXEL_WIDTH; x++){ #pragma HLS UNROLL factor=2 #pragma HLS PIPELINE II=1 if(!(x==0 && y==0)) // 最初の入力はすでに入力されている ins >> pix; // AXI4-Stream からの入力 b = pix.data & 0xff; g = (pix.data>>8) & 0xff; r = (pix.data>>16) & 0xff; // h と max, min を求める if(r==g && g==b && r==b){ max = r; // 8倍 min = r; }else if(r>=g && r>=b){ // r が最大 max = r; if(g>=b) min = b; else min = g; }else if(g>=r && g>=b){ // g が最大 max = g; if(r>=b) min = b; else min = r; }else{ // b が最大 max = b; if(r>=g) min = g; else min = r; } if(max-min == 0) h = 0; else if(max == r) h = 60 * (((g-b)<<MAG)/(max-min)); // MAGビットシフトして精 度を確保 else if(max == g) h = 60 * (((b-r)<<MAG)/(max-min)) + (120<<MAG); // MAG ビットシフトして精度を確保 else // if(max == b) h = 60 * (((r-g)<<MAG)/(max-min)) + (240<<MAG); // MAG ビットシフトして精度を確保 if(h < 0) h += 360<<MAG; h += 1<<(MAG-1); // +0.5、四捨五入 https://marsee101.blog.fc2.com/b log-entry-3604.html
32.
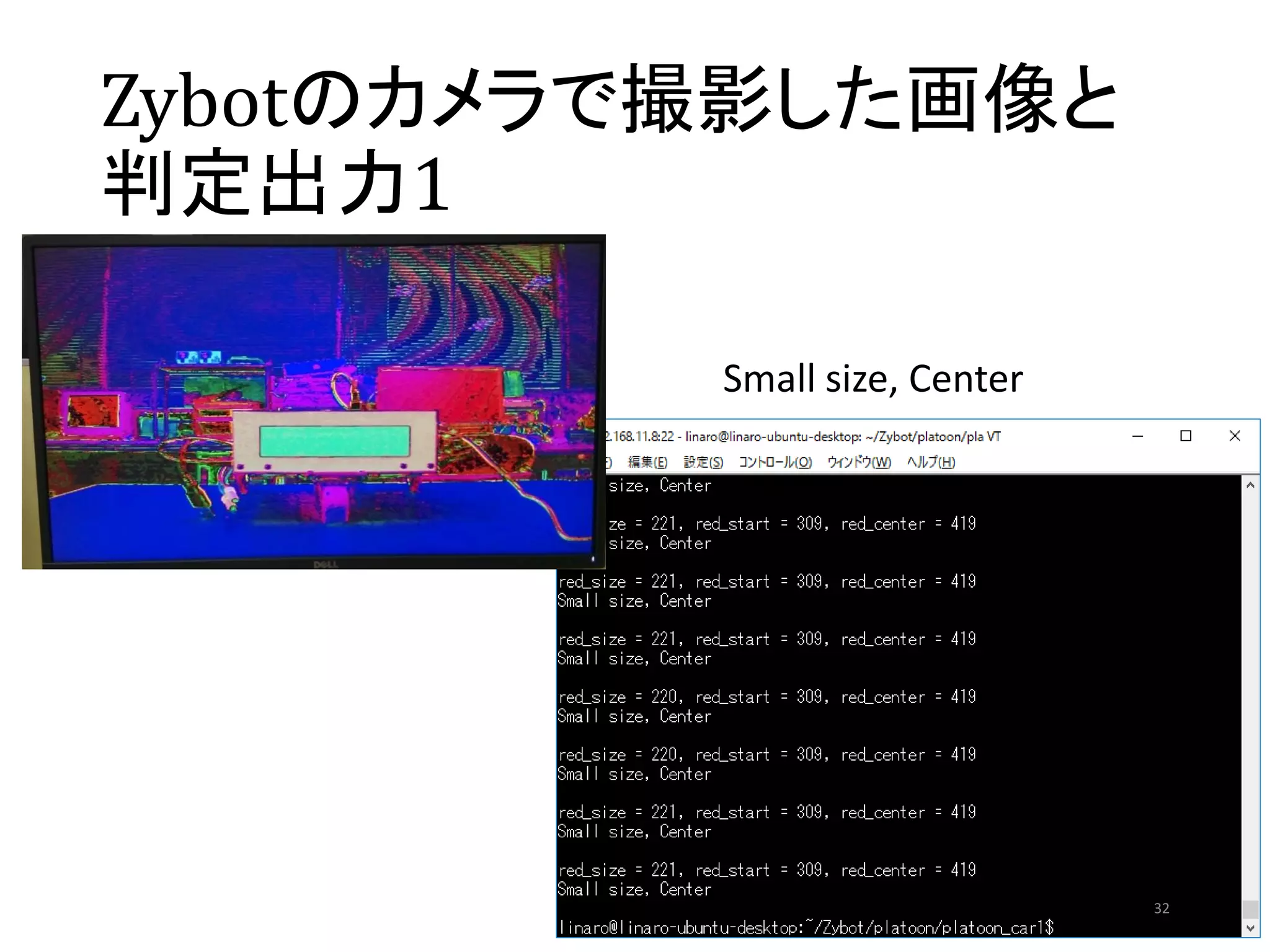
Zybotのカメラで撮影した画像と 判定出力1 32 Small size, Center
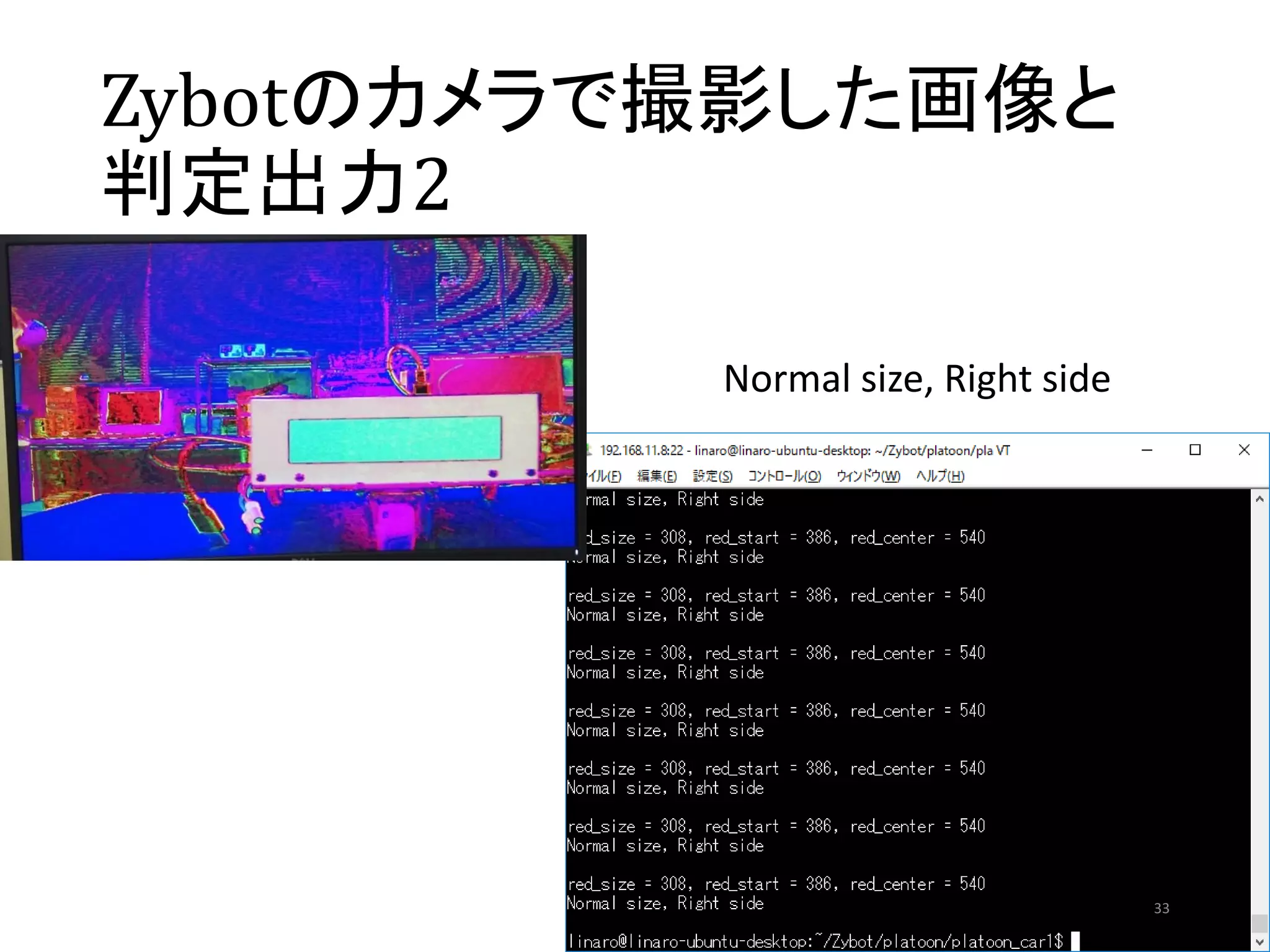
33.
Zybotのカメラで撮影した画像と 判定出力2 33 Normal size, Right
side
34.
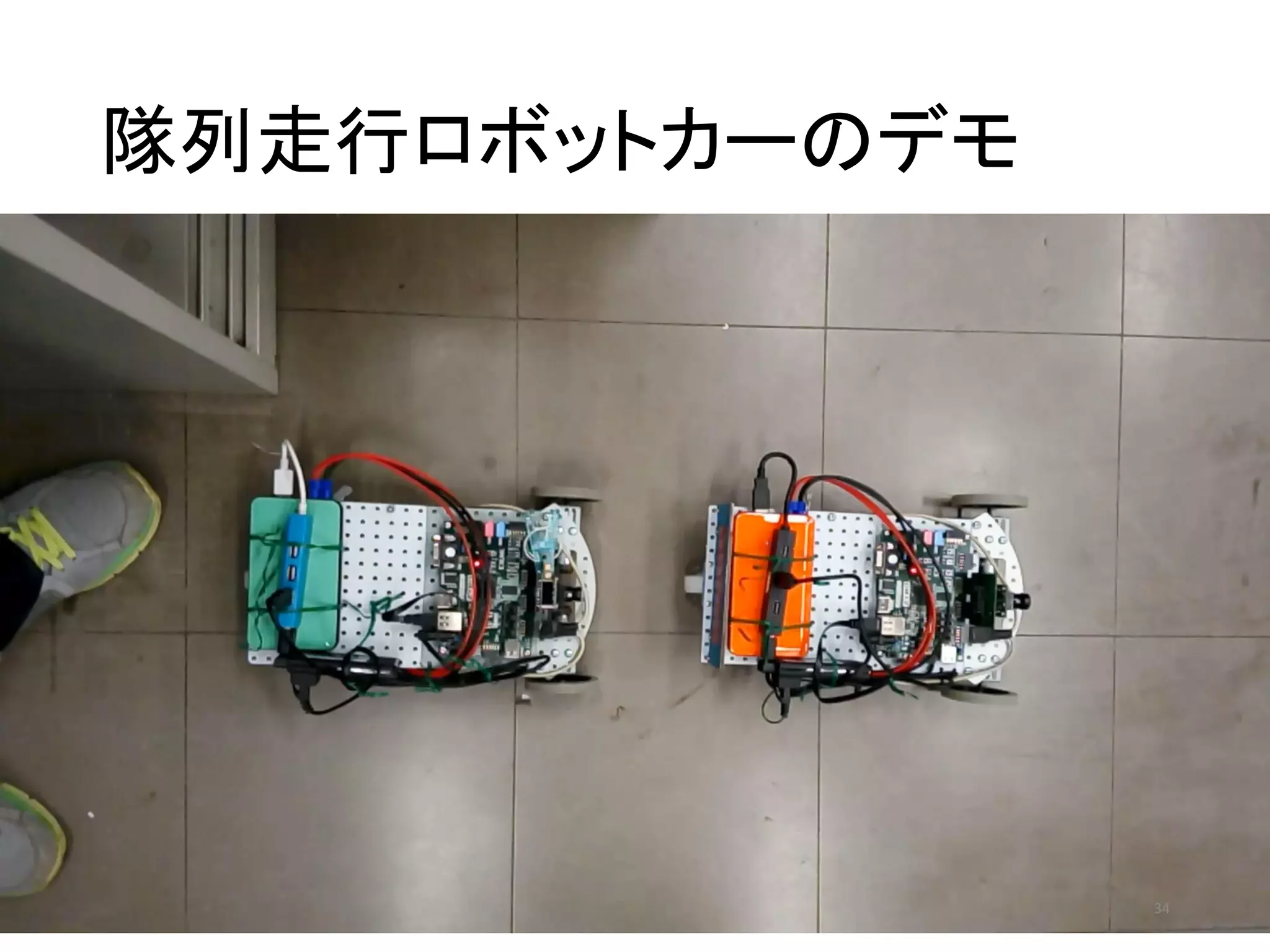
隊列走行ロボットカーのデモ 34
35.
その他の高位合成ツール • インテル® HLS
コンパイラーはインテル® Quartus® Prime 開発ソフトウェアのインストールに含まれる • 2017年に試してみたことがある • https://marsee101.web.fc2.com/intel_hls.html • Microchip社のSmartHLS • 2021年12月に試してみた • https://marsee101.web.fc2.com/smarthls.html 35
36.
まとめ • HLSは老齢エンジニアの救世主、使わなきゃ損 • 若いエンジニアにも時短のメリット •
バグが少ない • 実装時間が短い • 作れないIPもあるがHDLで書いちゃえばOK • カメラ・インターフェースIP • ビットマップ・ディスプレイ・コントローラIP • シンクロナイザーIP… • 使い方分からない? • トレーニングで解消 36
Download
![Vivado HLS対Vitis HLS(ソーベ
ル・フィルタ)
12
int sobel_filter_axim(volatile int32_t *cam_fb, volatile int32_t *sobel_fb){
#pragma HLS INTERFACE m_axi depth=3072 port=sobel_fb offset=slave
#pragma HLS INTERFACE m_axi depth=3072 port=cam_fb offset=slave
#pragma HLS INTERFACE s_axilite port=return
int32_t sobel_val, sobel_h_val, sobel_v_val;
int32_t pix[3][3];
LOOP_Y: for(int y=0; y<(DISPLAY_HIGHT-2); y++){
LOOP_X: for(int x=0; x<(DISPLAY_WIDTH-2); x++){
LOOP1: for(int i=0; i<3; i++){
LOOP2: for(int j=0; j<3; j++){
pix[i][j] = conv_rgb2y(cam_fb[(y+i)*DISPLAY_WIDTH+(x+j)]);
}
}
sobel_h_val = sobel_fil(HORIZONTAL, pix[0][0], pix[0][1], pix[0][2],
pix[1][0], pix[1][1], pix[1][2],
pix[2][0], pix[2][1], pix[2][2]);
sobel_v_val = sobel_fil(VERTICAL, pix[0][0], pix[0][1], pix[0][2],
pix[1][0], pix[1][1], pix[1][2],
pix[2][0], pix[2][1], pix[2][2]);
sobel_val = square_root8(sobel_h_val*sobel_h_val + sobel_v_val*sobel_v_val);
sobel_fb[y*(DISPLAY_WIDTH-2)+x] = (sobel_val<<16)+(sobel_val<<8)+sobel_val; // 通常出力
}
}](https://image.slidesharecdn.com/2022-03-15-220315103521/75/ACRi-12-2048.jpg)
![ガボール・フィルタIPのソースコード
26
int Gabor_filter_lh(hls::stream<ap_axis<32,1,1,1> >& ins,
hls::stream<ap_axis<32,1,1,1> >& outs){
#pragma HLS INTERFACE axis port=ins
#pragma HLS INTERFACE axis port=outs
#pragma HLS INTERFACE s_axilite port=return
ap_axis<32,1,1,1> pix;
ap_axis<32,1,1,1> gabor;
hls::LineBuffer<ARRAY_SIZE-
1, HORIZONTAL_PIXEL_WIDTH, int> linebuf;
hls::Window<ARRAY_SIZE, ARRAY_SIZE, int> mbuf;
int gray_pix, val, i, j, x, y;
do { // user が 1になった時にフレームがスタートする
ins >> pix;
} while(pix.user == 0);
for (y=0; y<VERTICAL_PIXEL_WIDTH; y++){
for (x=0; x<HORIZONTAL_PIXEL_WIDTH; x++){
#pragma HLS PIPELINE II=1
if (!(x==0 && y==0)) // 最初の入力はすでに入力されている
ins >> pix; // AXI4-Stream からの入力
mbuf.shift_left(); // mbuf の列を1ビット左シフト
for(i=ARRAY_SIZE-2; i>=0; --i){
mbuf.insert(linebuf(i,x), i+1, ARRAY_SIZE-1);
}
gray_pix = conv_rgb2y(pix.data);
mbuf.insert(gray_pix, 0, ARRAY_SIZE-1);
// LineBuffer の更新
linebuf.shift_down(x);
linebuf.insert_bottom(gray_pix, x);
// Gabor filter の演算
for (j=0, val=0; j<ARRAY_SIZE-1; j++){
for (i=0; i<ARRAY_SIZE-1; i++){
val += gabor_weight[j][i] * mbuf(ARRAY_SIZE-1-j,i);
}
}
val = val/256; // 256倍してあるので、1/256して戻す
if (val<0)
//val = -val; // 絶対値
val = 0; // マイナスの値を0に丸める
else if (val>255)
val = 255;
// Gabor filter・データの書き込み
gabor.data = (val<<16)+(val<<8)+val;
// 最初のARRAY_SIZE-1行とその他の行の最初のARRAY_SIZE-
1列は無効データなので0とする
if (x<(ARRAY_SIZE-1) || y<(ARRAY_SIZE-1))
gabor.data = 0;
if (x==0 && y==0) // 最初のデータでは、TUSERをアサートする
gabor.user = 1;
else
gabor.user = 0;
if (x == (HORIZONTAL_PIXEL_WIDTH-1)) // 行の最後
で TLAST をアサートする
gabor.last = 1;
else
gabor.last = 0;
outs << gabor; // AXI4-Stream へ出力
}
}
return(0);
}
https://marsee101.blog.fc2.com/b
log-entry-3524.html](https://image.slidesharecdn.com/2022-03-15-220315103521/75/ACRi-26-2048.jpg)