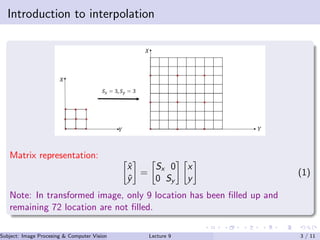
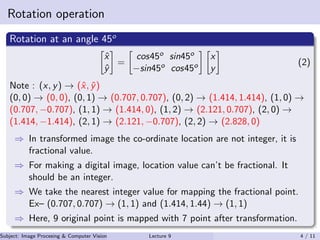
This document discusses interpolation and resampling in image processing. It introduces interpolation as a way to assign intensity values to fractional coordinate locations that result from image transformations like rotation or scaling. Common interpolation methods are described, including constant, linear, and higher-order polynomial interpolation using B-spline basis functions. Resampling is needed when transforming digital images between discrete coordinate grids, and interpolation helps estimate values at non-integer coordinates. The document outlines the use of B-splines for smooth interpolation and local curve approximation in images.