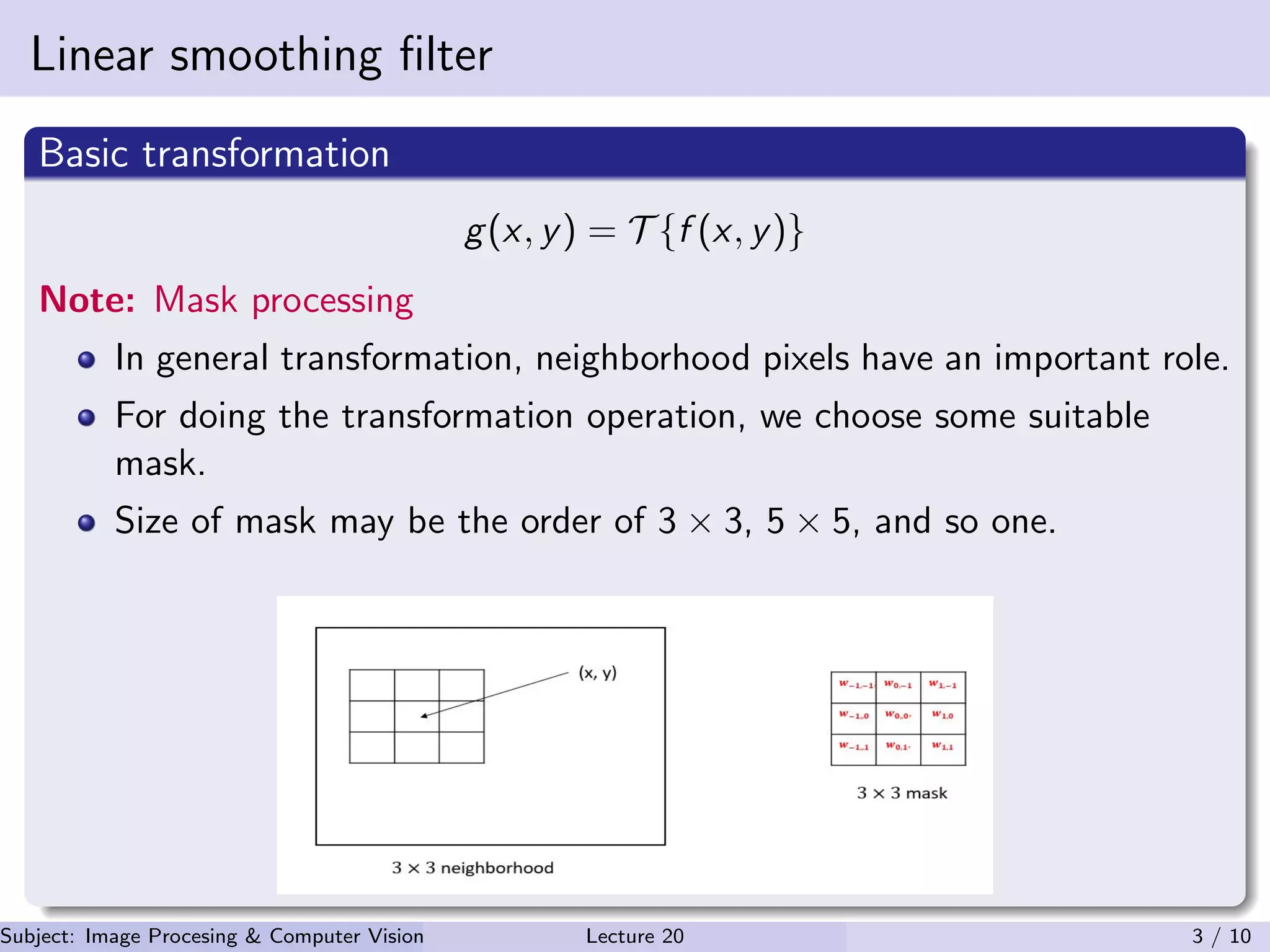
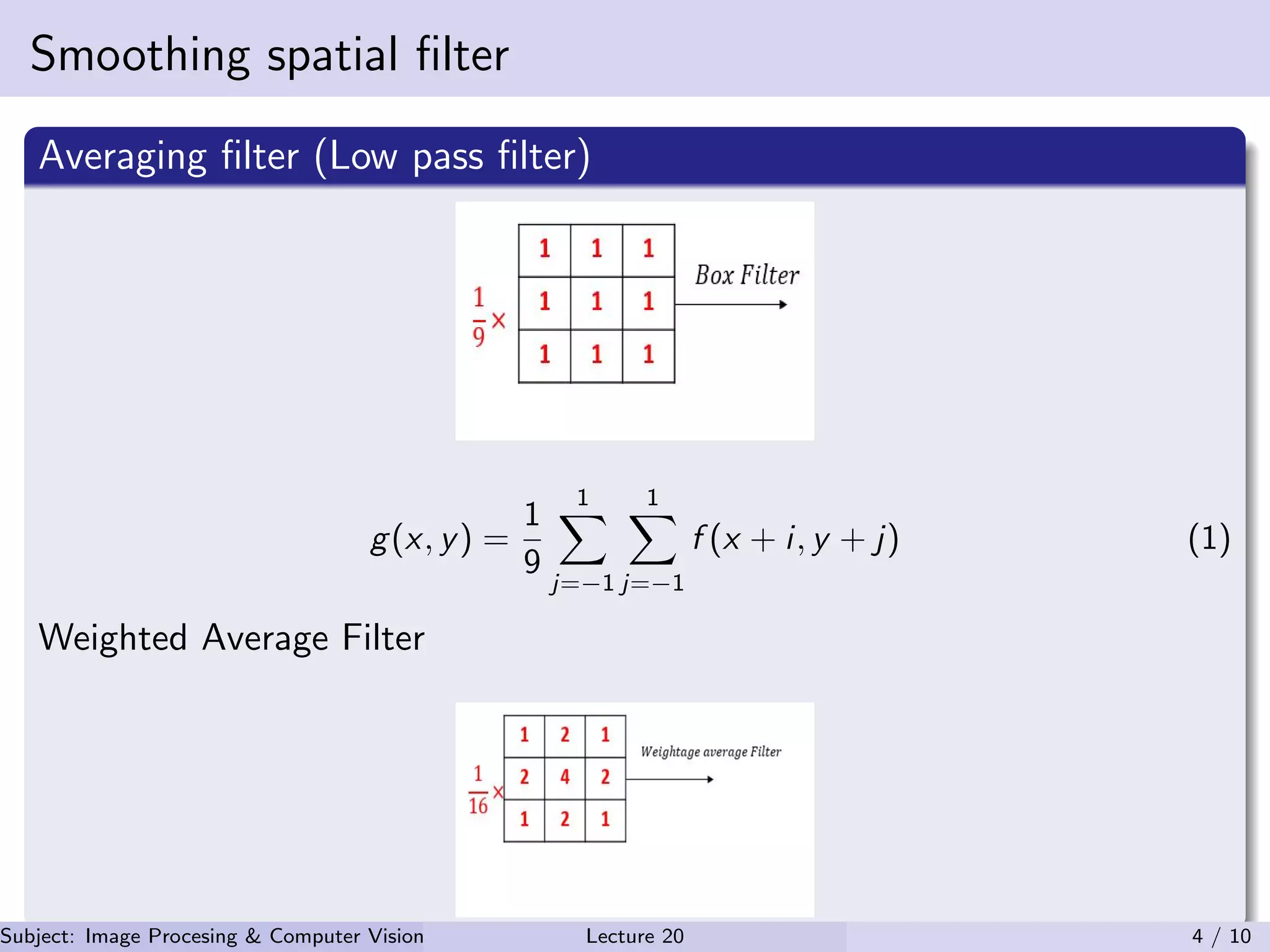
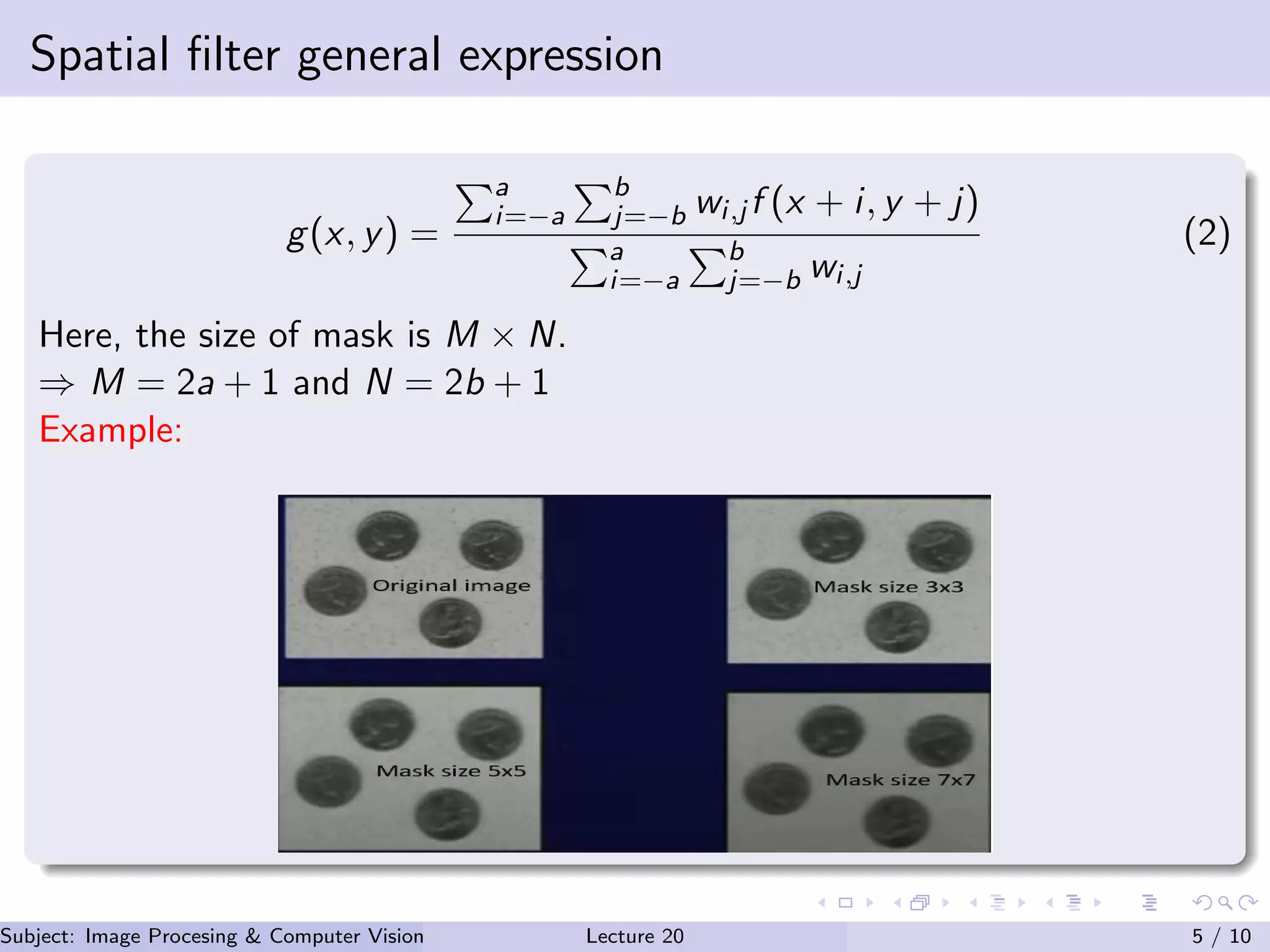
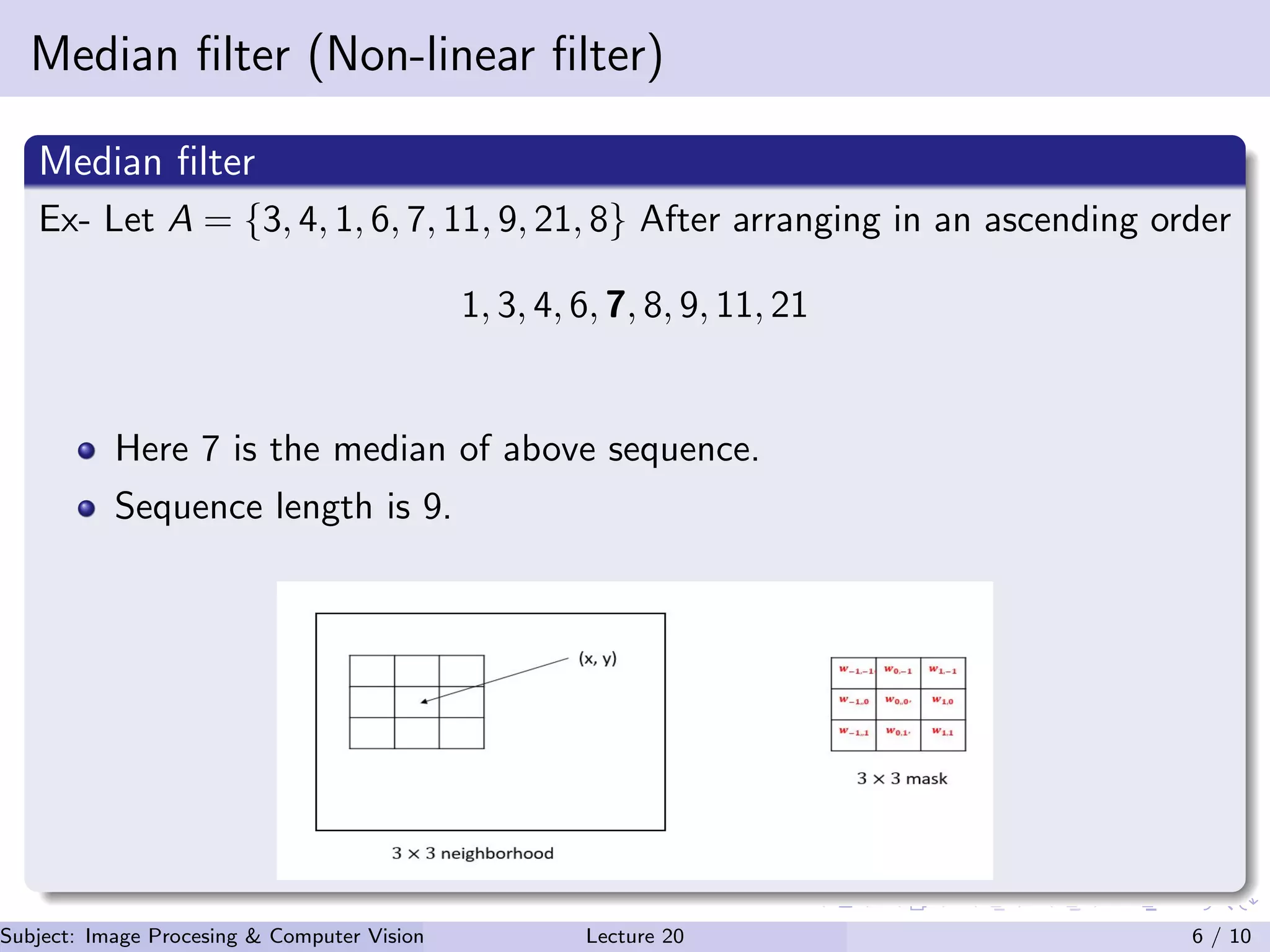
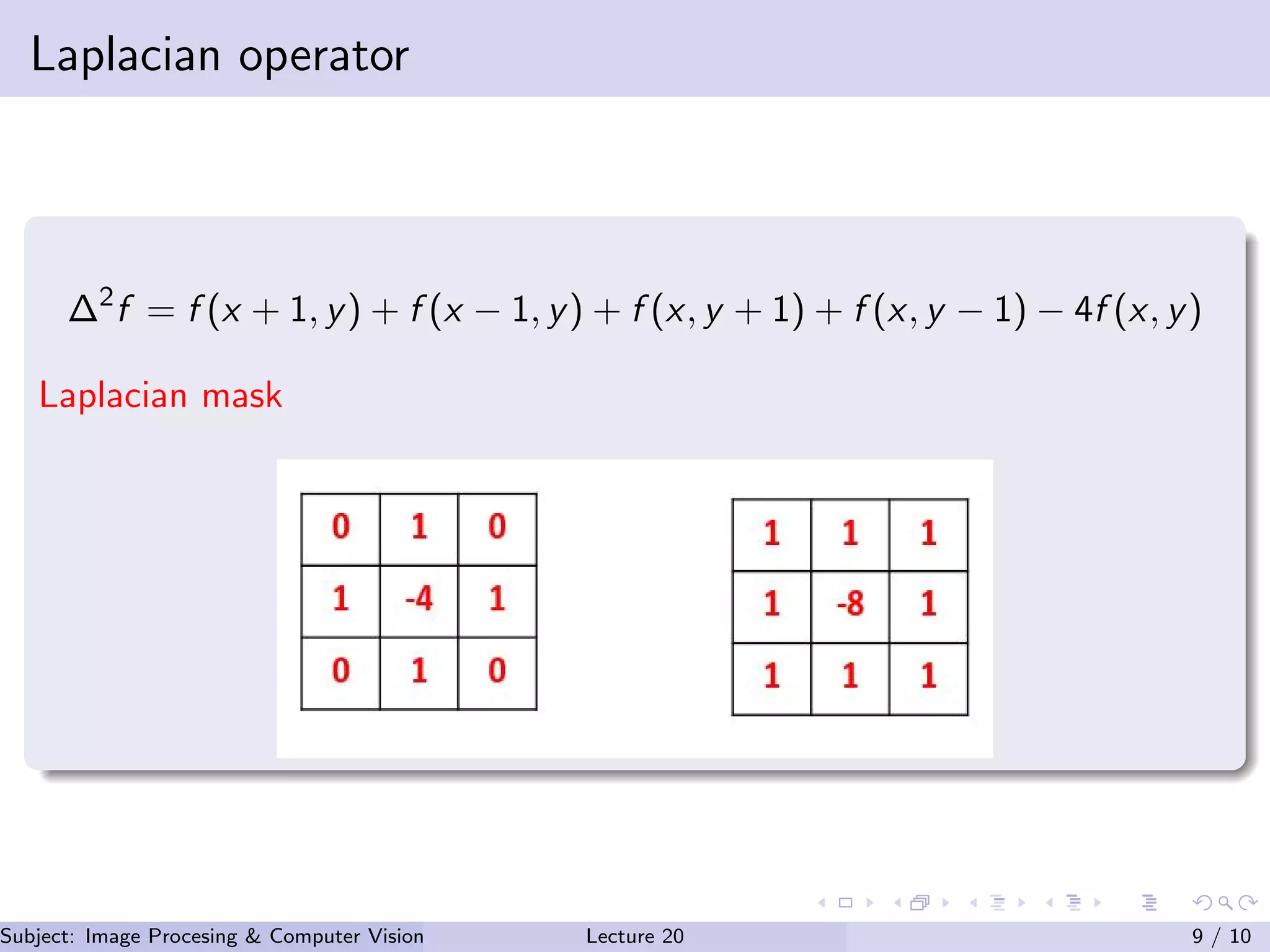
The document discusses various mask processing techniques in image processing and computer vision, focusing on linear smoothing filters, median filters, and sharpening filters. It explains the mathematical foundations and applications of these filters, including spatial filtering methods and derivative operations. References to key literature in the field are also provided.



























![Lec5_AIP [Spatial Filtering] (1).pptxJJJJJJJJJJJJJJJJJJJJJJJ](https://cdn.slidesharecdn.com/ss_thumbnails/lec5aipspatialfiltering1-240805131531-de004d64-thumbnail.jpg?width=640&height=640&fit=bounds)
![Lec5_AIP [Spatial Filtering] (1).pptxt767686777](https://cdn.slidesharecdn.com/ss_thumbnails/lec5aipspatialfiltering1-240729201851-b222fde6-thumbnail.jpg?width=640&height=640&fit=bounds)