Downloaded 19 times

![Agents and environments
• The agent function maps from percept histories
to actions:
[f: P* A]
• The agent program runs on the physical
architecture to produce f.
• agent comprised of : architecture + program](https://image.slidesharecdn.com/lecture2-120919112122-phpapp01/85/Lecture-2-4-320.jpg)
![Vacuum-cleaner world
• Percepts: location and contents, e.g., [A,Dirty]
• Actions: Left, Right, Suck, NoOp](https://image.slidesharecdn.com/lecture2-120919112122-phpapp01/85/Lecture-2-5-320.jpg)
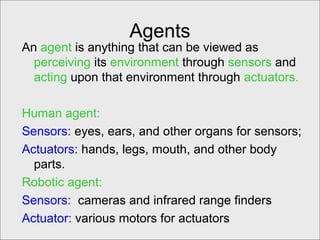
![A vacuum-cleaner agent
Percept Sequence Action
[A, Clean] Right
[A,Dirty] Suck
[B, Clean] Left
[B, Dirty] Suck
[A, Clean], [A, Clean] Right
[A,Clean], [A,Dirty] Suck
…. …..
[A, Clean], [A, Clean], [A, Clean] Right
[A, Clean], [A, Clean], [A, Dirty] Suck
….. ….](https://image.slidesharecdn.com/lecture2-120919112122-phpapp01/85/Lecture-2-6-320.jpg)















![Agent program for a vacuum-
cleaner agent
Function Reflex_Va_Agent([location,
status]) return an action
If status = Dirty then return Suck
Else if location = A then return Right
Else if location = B then return Left
Good only if environment is fully observable otherwise disaster.
For example if location sensor is off then problem? [dirty] [clean]](https://image.slidesharecdn.com/lecture2-120919112122-phpapp01/85/Lecture-2-22-320.jpg)







This document discusses intelligent agents and their environments. It defines an agent as anything that perceives its environment and acts upon it. Rational agents are those that select actions expected to maximize their performance based on perceptions. An agent's task environment consists of its performance measure, environment, actuators, and sensors. Environment types include fully/partially observable, deterministic/stochastic, and single/multi-agent. Four basic agent types are described: simple reflex agents, model-based reflex agents, goal-based agents, and utility-based agents. Learning agents use feedback to improve performance over time. The document provides examples of agents and discusses their design considerations based on task environment properties.


















![Depth first search [dfs]](https://cdn.slidesharecdn.com/ss_thumbnails/depthfirstsearchdfs-190926145304-thumbnail.jpg?width=640&height=640&fit=bounds)