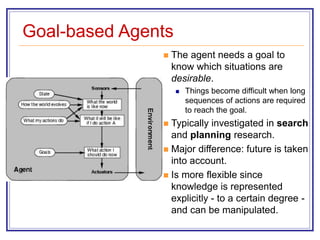
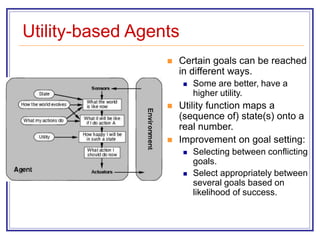
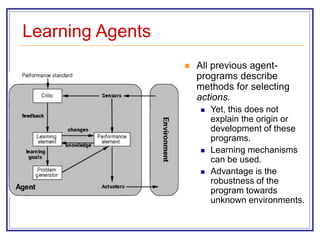
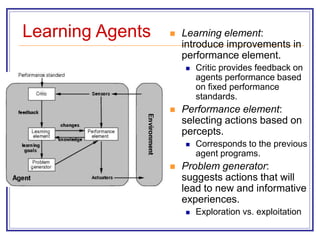
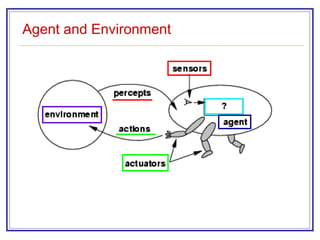
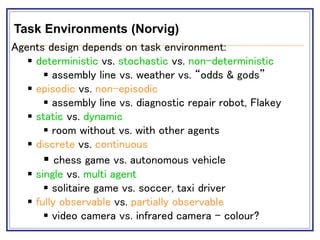
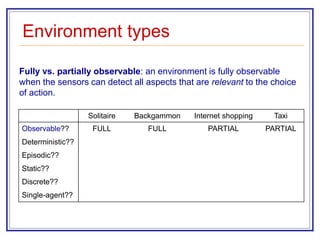
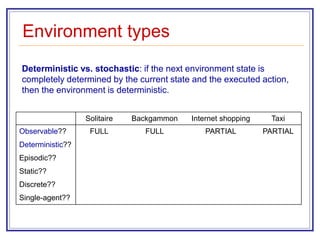
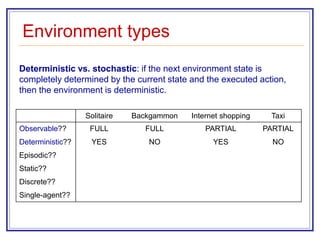
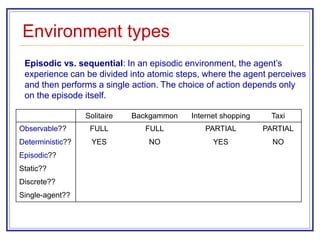
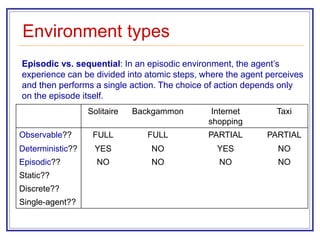
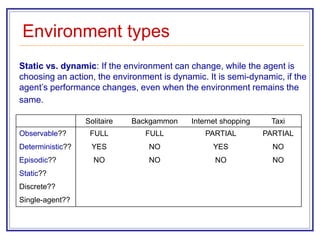
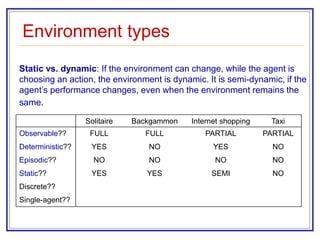
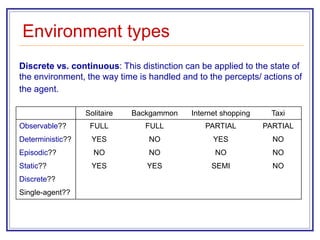
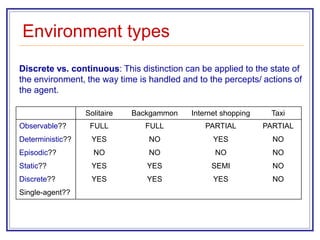
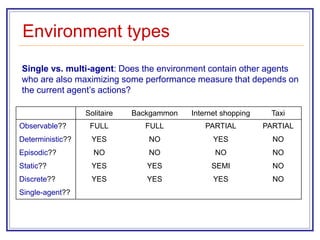
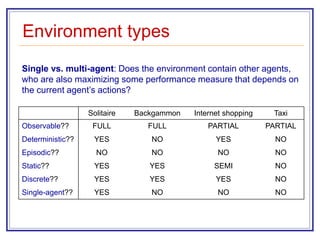
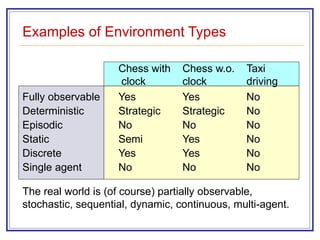
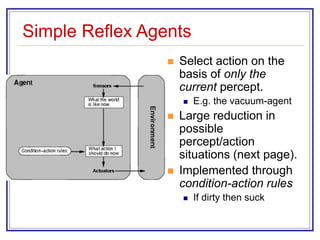
The document discusses different types of intelligent agents and their environments. It describes how agents are defined as anything that can perceive its environment and act upon it. The key aspects of an agent's task environment are its performance measure, possible environment states, available actions, and sensors. Different types of environments are classified based on properties like observability, determinism, episodic vs sequential, static vs dynamic, discrete vs continuous, and single vs multi-agent. The document also outlines different approaches for how an agent's program or architecture can work, including simple reflex agents, model-based agents, goal-based agents, and utility-based agents.

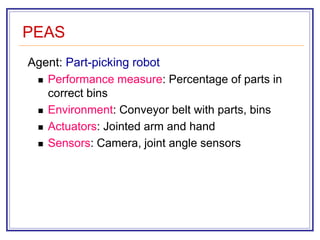
![The Vacuum-Cleaner Mini-World
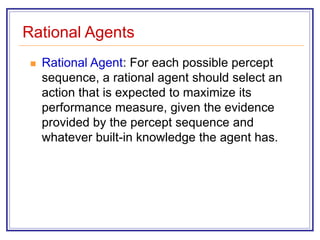
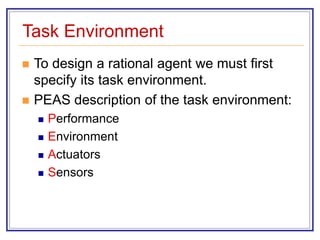
Environment: square A and B
Percepts: location and status, e.g., [A, Dirty]
Actions: left, right, suck, and no-op](https://image.slidesharecdn.com/agents-1-230914165748-3becbcfe/85/agents-in-ai-ppt-5-320.jpg)
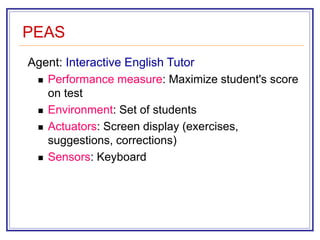
![The Vacuum-Cleaner Mini-World
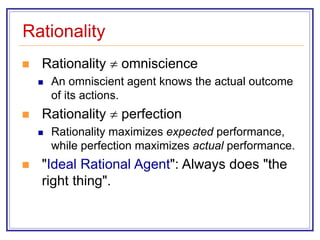
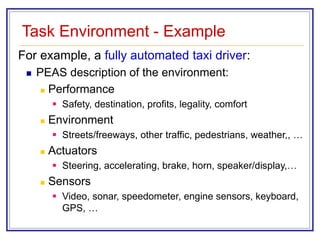
World State Action
[A,Clean] Right
[A, Dirty] Suck
[B, Clean] Left
[B, Dirty] Suck
[A, Dirty], [A, Clean] Right
[A, Clean], [B, Dirty]
[A, Clean], [B, Clean]
...
Suck
No-op
...](https://image.slidesharecdn.com/agents-1-230914165748-3becbcfe/85/agents-in-ai-ppt-6-320.jpg)
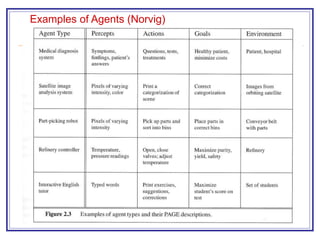
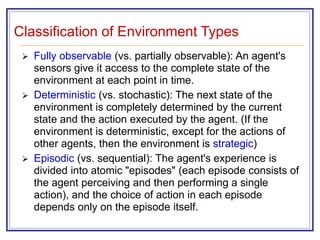
![Agent Function
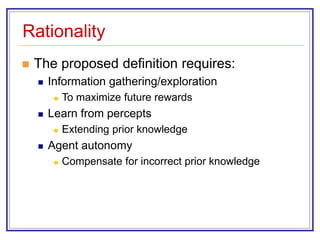
The agent function maps from percept histories to
actions:
[f: P* A]
An agent is completely specified by the agent
function mapping percept sequences to actions
The agent program runs on the physical
architecture to produce f.
agent = architecture + program](https://image.slidesharecdn.com/agents-1-230914165748-3becbcfe/85/agents-in-ai-ppt-7-320.jpg)
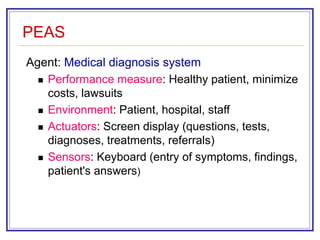
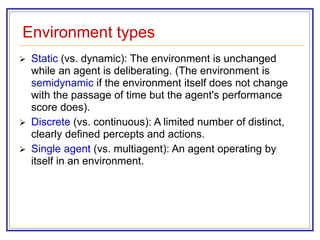
![The Vacuum-Cleaner Mini-World
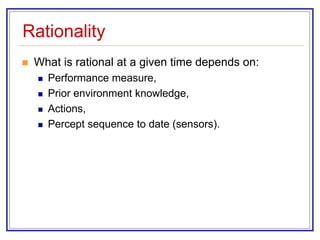
function REFLEX-VACUUM-AGENT ([location, status]) return an
action
if status == Dirty then return Suck
else if location == A then return Right
else if location == B then return Left
Does not work this way. Need full state space (table) or memory.](https://image.slidesharecdn.com/agents-1-230914165748-3becbcfe/85/agents-in-ai-ppt-8-320.jpg)
![The Vacuum-Cleaner Mini-World
World State Action
[A, Clean]
[A, Dirty]
[B, Clean]
[B, Dirty]
[A, Dirty], [A, Clean]
[A, Clean], [B, Dirty]
[B, Dirty], [B, Clean]
[B, Clean], [A, Dirty]
[A, Clean], [B, Clean]
[B, Clean], [A, Clean]
Right
Suck
Left
Suck
Right
Suck
Left
Suck
No-op
No-op](https://image.slidesharecdn.com/agents-1-230914165748-3becbcfe/85/agents-in-ai-ppt-9-320.jpg)
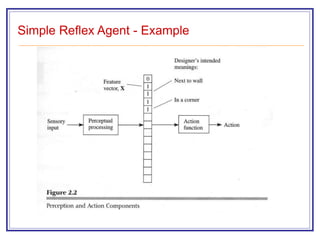
![Simple Reflex Agents
function SIMPLE-REFLEX-AGENT(percept)
returns an action
static: rules, a set of condition-action rules
state INTERPRET-INPUT(percept)
rule RULE-MATCH(state, rules)
action RULE-ACTION[rule]
return action
Will only work if the environment is fully observable.
Otherwise infinite loops may occur.](https://image.slidesharecdn.com/agents-1-230914165748-3becbcfe/85/agents-in-ai-ppt-47-320.jpg)
![The Vacuum-Cleaner Mini-World
function REFLEX-VACUUM-AGENT ([location, status]) return an
action
if status == Dirty then return Suck
else if location == A then return Right
else if location == B then return Left
Does not work this way. Need full state space (table) or memory.](https://image.slidesharecdn.com/agents-1-230914165748-3becbcfe/85/agents-in-ai-ppt-48-320.jpg)
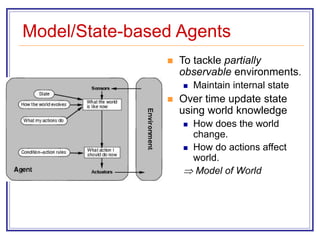
![Model/State-based Agents
function REFLEX-AGENT-WITH-STATE(percept)
returns an action
static: rules, a set of condition-action rules
state, a description of the current world state
(action, the most recent action)
state UPDATE-STATE(state, (action,) percept)
rule RULE-MATCH(state, rule)
action RULE-ACTION[rule]
return action](https://image.slidesharecdn.com/agents-1-230914165748-3becbcfe/85/agents-in-ai-ppt-50-320.jpg)