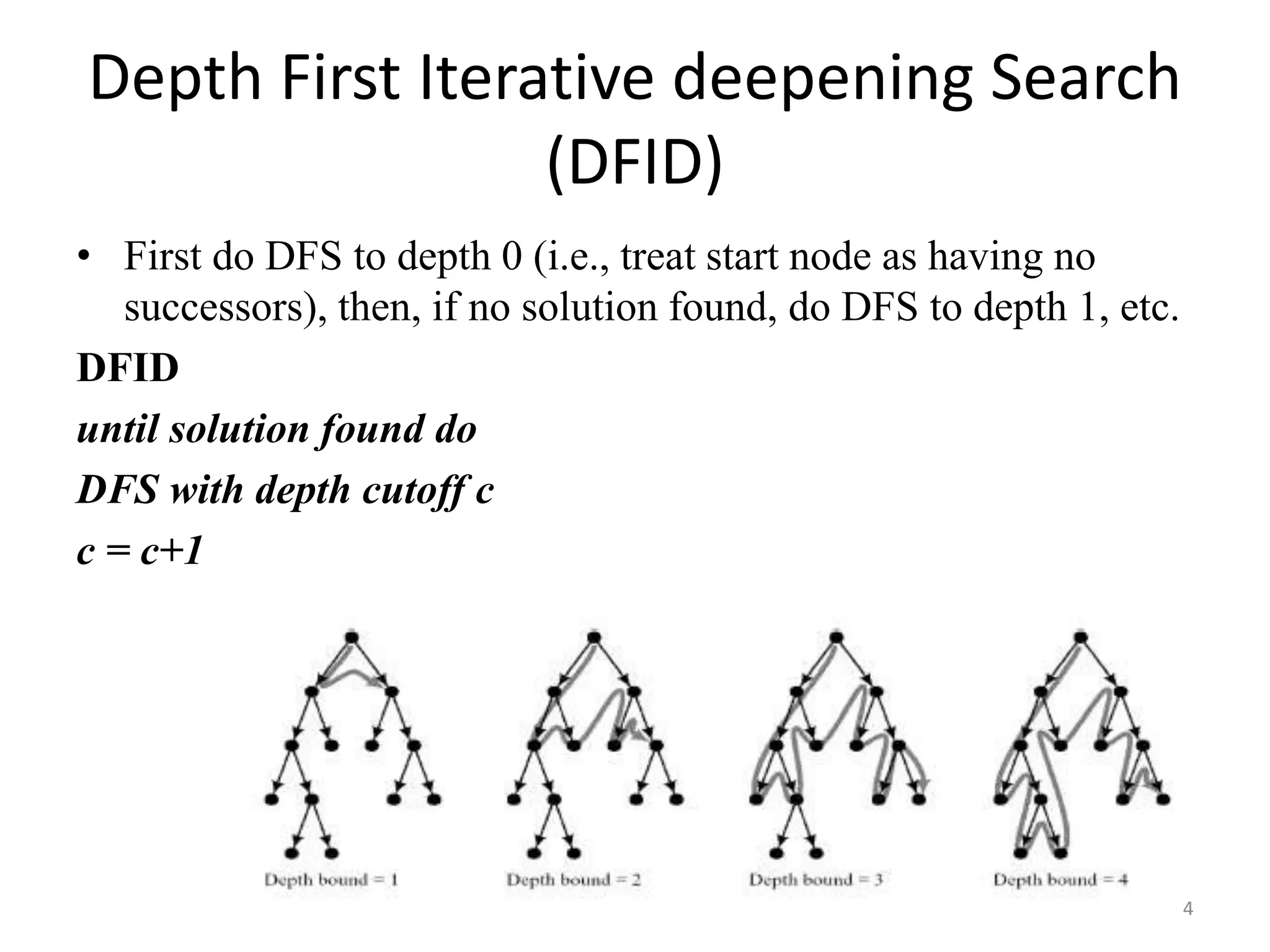
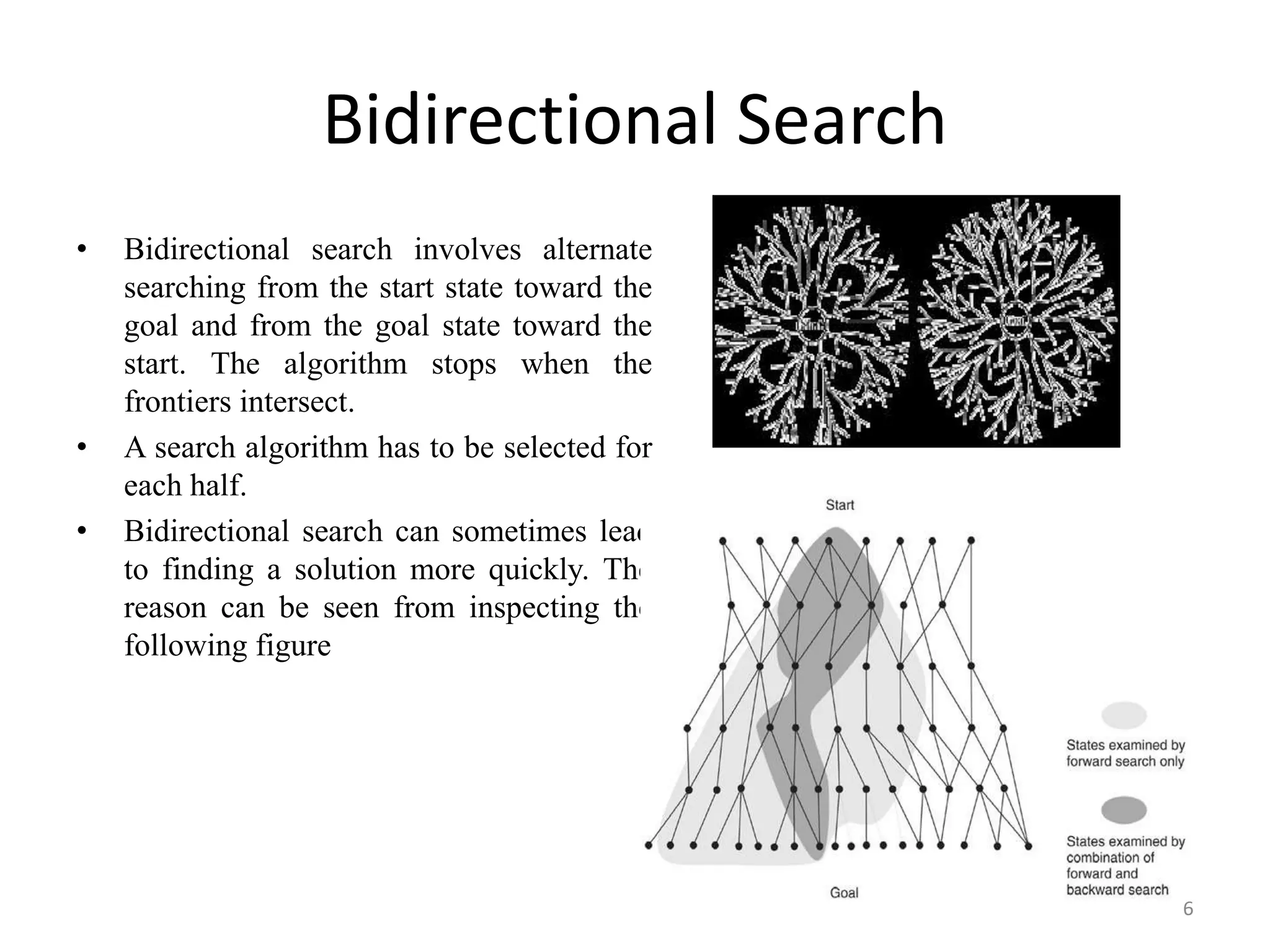
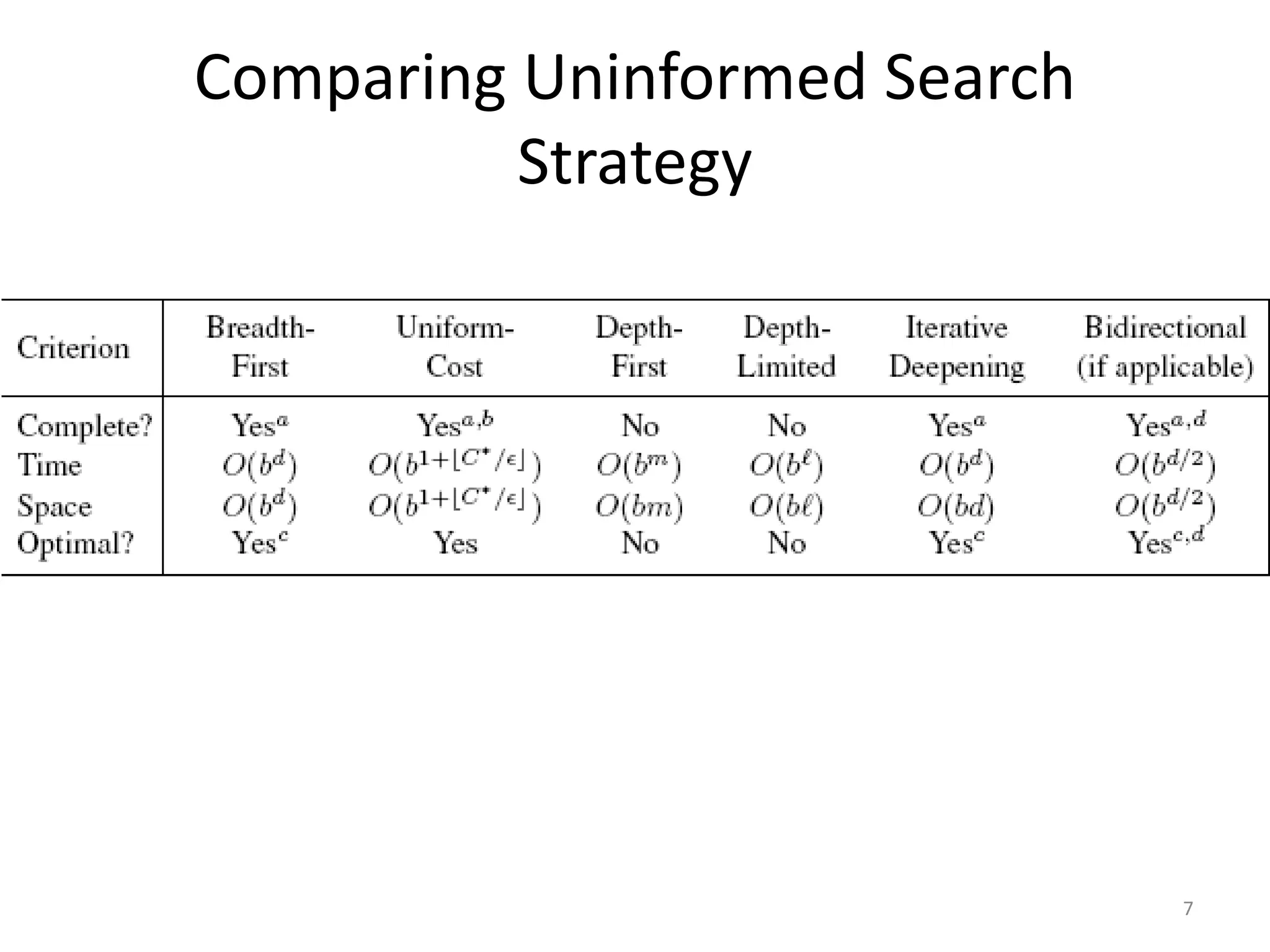
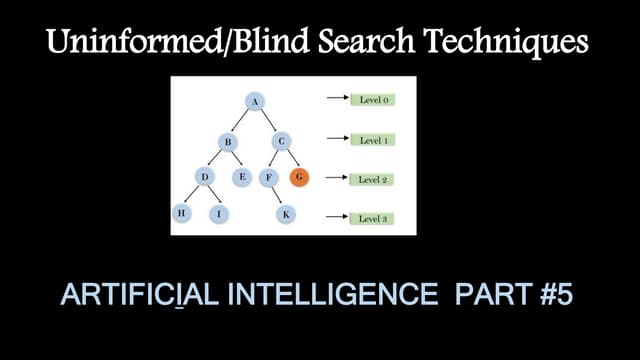
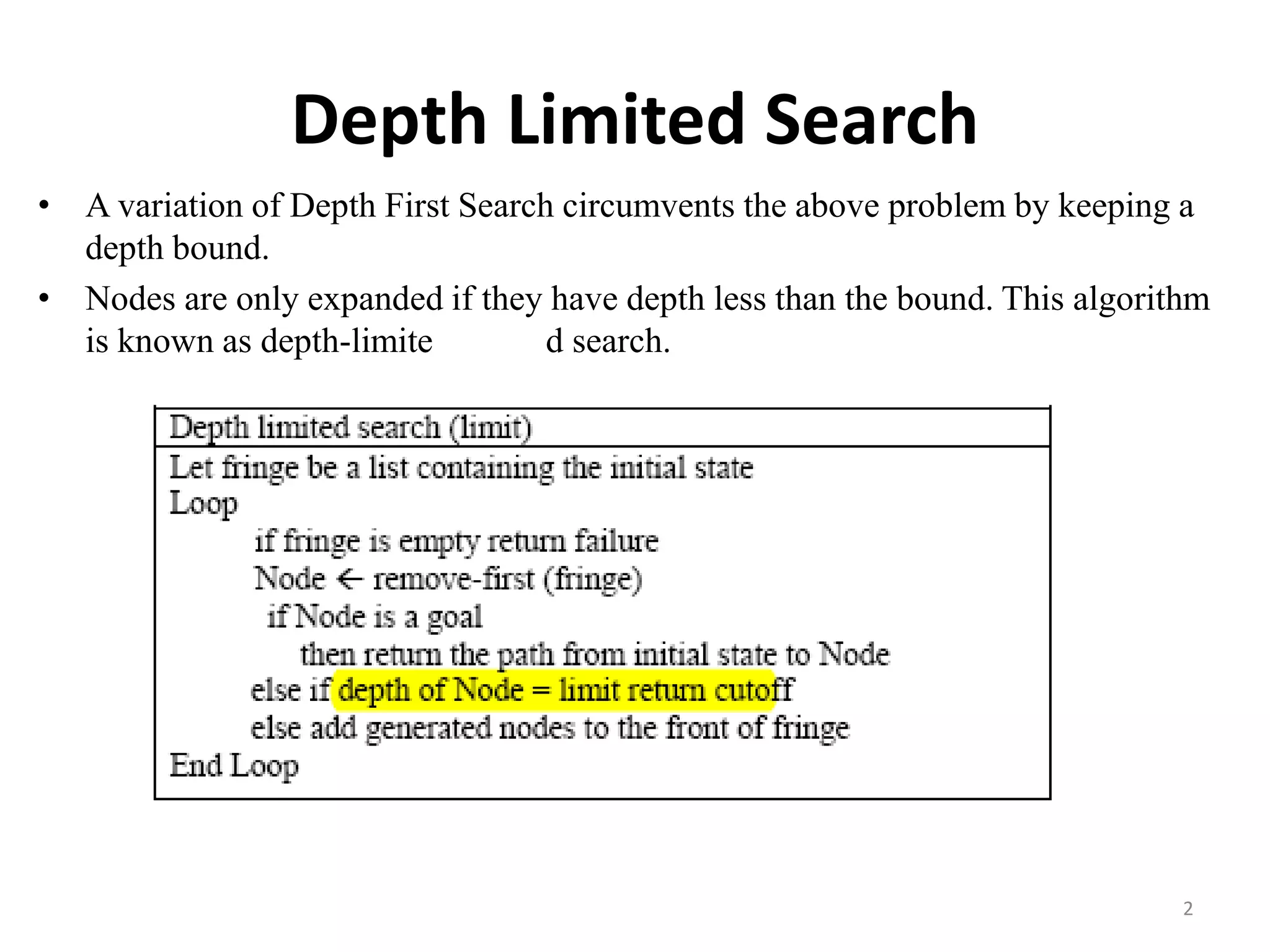
Depth-limited search is a variation of depth-first search that limits the depth of node exploration to circumvent problems with unbounded depth-first search. Branch and bound search uses heuristics to prune parts of the search tree that cannot possibly contain better solutions than what has already been found. Depth-first iterative deepening search exhaustively searches each level of the search tree, starting from depth 0 and incrementally increasing the depth, until a solution is found. Bidirectional search simultaneously explores the search space from the start and goal nodes until their frontiers intersect, potentially finding solutions faster than unidirectional search.
![Branch and Bound
1. Initialize: set OPEN=s, CLOSED={}, c(s)=0, c*=∞
2. Fail: If OPEN={}, then return C*
3. Select: Select a state n from OPEN and save in CLOSED
4. Terminate: If n∈G and C(n)<C*, then
Set C*= = C(n) and GOTO step 2
1. Expand: Check if C(n)<C* generate the successor of n
For each successor, m, insert m in OPEN only if
if m∈[OPEN∪CLOSED]
set c(m)= C[n]+C[n,m] and insert m in n
if m∈[OPEN∪CLOSED]
set c(m)= min{C[m], C[n]+C[n,m]}
If C[m]has decreased and m ∈ CLOSED move it to OPEN
2. Loop: Goto step 2
3](https://image.slidesharecdn.com/lecture-10uninformedseachtechniquesconti-170131095557/75/Lecture-10-Uninformed-Search-Techniques-conti-3-2048.jpg)