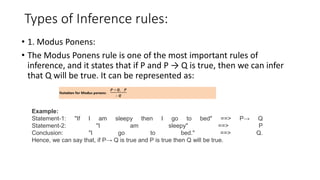
Depth-first search is a recursive algorithm that starts at the root node of a tree or graph and explores each path to its greatest depth before moving to the next path. It uses a stack data structure and has advantages of low memory usage and faster goal finding compared to breadth-first search in some cases. However, it risks getting stuck in infinite loops and not finding solutions. Variations include depth-limited search, uniform-cost search, and iterative deepening depth-first search.








![• Completeness:
• Uniform-cost search is complete, such as if there is a solution, UCS will find it.
• Time Complexity:
• Let C* is Cost of the optimal solution, and ε is each step to get closer to the goal node.
Then the number of steps is = C*/ε+1. Here we have taken +1, as we start from state 0
and end to C*/ε.
• Hence, the worst-case time complexity of Uniform-cost search isO(b1 + [C*/ε])/.
• Space Complexity:
• The same logic is for space complexity so, the worst-case space complexity of Uniform-
cost search is O(b1 + [C*/ε]).
• Optimal:
• Uniform-cost search is always optimal as it only selects a path with the lowest path cost.](https://image.slidesharecdn.com/new-ii-230914134029-3d6d64de/85/NEW-II-pptx-13-320.jpg)



![• Completeness: Bidirectional Search is complete if we use BFS in both
searches.
• Time Complexity: Time complexity of bidirectional search using BFS
is O(bd).
• Space Complexity: Space complexity of bidirectional search is O(bd).
• Optimal: Bidirectional search is Optimal.
• ]](https://image.slidesharecdn.com/new-ii-230914134029-3d6d64de/85/NEW-II-pptx-21-320.jpg)