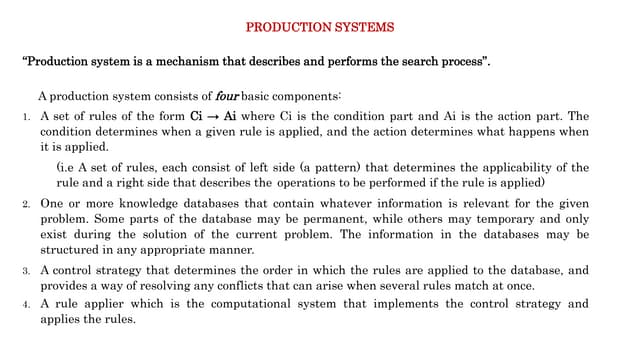
The document discusses different types of agents and problem solving by searching. It describes four types of agent programs: simple reflex agents, model-based reflex agents, goal-based agents, and utility-based agents. It also covers formulating problems, searching strategies, problem solving by searching, measuring performance of searches, types of search strategies including uninformed and informed searches, and specific search algorithms like breadth-first search, uniform cost search, depth-first search, and depth-limited search.












![while queue:
# Dequeue a vertex from
# queue and print it
s = queue.pop(0)
print (s, end = " ")
# Get all adjacent vertices of the
# dequeued vertex s. If a adjacent
# has not been visited, then mark it
# visited and enqueue it
for i in self.graph[s]:
if visited[i] == False:
queue.append(i)
visited[i] = True
# Driver code
# Create a graph given in
# the above diagram
g = Graph()
g.addEdge(0, 1)
g.addEdge(0, 2)
g.addEdge(1, 2)
g.addEdge(2, 0)
g.addEdge(2, 3)
g.addEdge(3, 3)
print ("Following is Breadth First Traversal"
" (starting from vertex 2)")
g.BFS(2)
# from a given source vertex. BFS(int s)
# traverses vertices reachable from s.from collections
import defaultdict
# This class represents a directed graph
# using adjacency list representation
class Graph:
# Constructor
def __init__(self):
# defa cvgt5tfult dictionary to store graph
self.graph = defaultdict(list)
# function to add an edge to graph
def addEdge(self,u,v):
self.graph[u].append(v)
# Function to print a BFS of graph
def BFS(self, s):
# Mark all the vertices as not visited
visited = [False] * (max(self.graph)+1)
# Create a queue for BFS
queue = []
# Mark the source node as
# visited and enqueue it
queue.append(s)
visited[s] = True](https://image.slidesharecdn.com/introductiontoai-unit-1-part-2-240318194927-9034d9ba/75/PPT-ON-INTRODUCTION-TO-AI-UNIT-1-PART-2-pptx-14-2048.jpg)













![CSP…
• A relation can be represented as an explicit list of all tuples of
values that satisfy the constraint,
• or as an abstract relation that supports two operations: testing if
a tuple is a member of the relation and enumerating the
members of the relation.
• For example, if X1 and X2 both have the domain {A,B}, then the
constraint saying the two variables must have different values,
can be written as (X1, X2), [(A,B), (B,A)] or as <(X1, X2), X1 = X2 >
• To solve a CSP, we need to define a state space and the notion of
a solution.
• Each state in a CSP is defined by an assignment of values to
some or all of the variables, {Xi= vi , Xj = vj , . . .}.
• An assignment that does not violate any constraints is called a
consistent or legal assignment.
• A complete assignment is one in which every variable is
assigned, and a solution to a CSP is a consistent, complete
assignment.
• A partial assignment is one that assigns values to only some of
the variables.](https://image.slidesharecdn.com/introductiontoai-unit-1-part-2-240318194927-9034d9ba/75/PPT-ON-INTRODUCTION-TO-AI-UNIT-1-PART-2-pptx-28-2048.jpg)