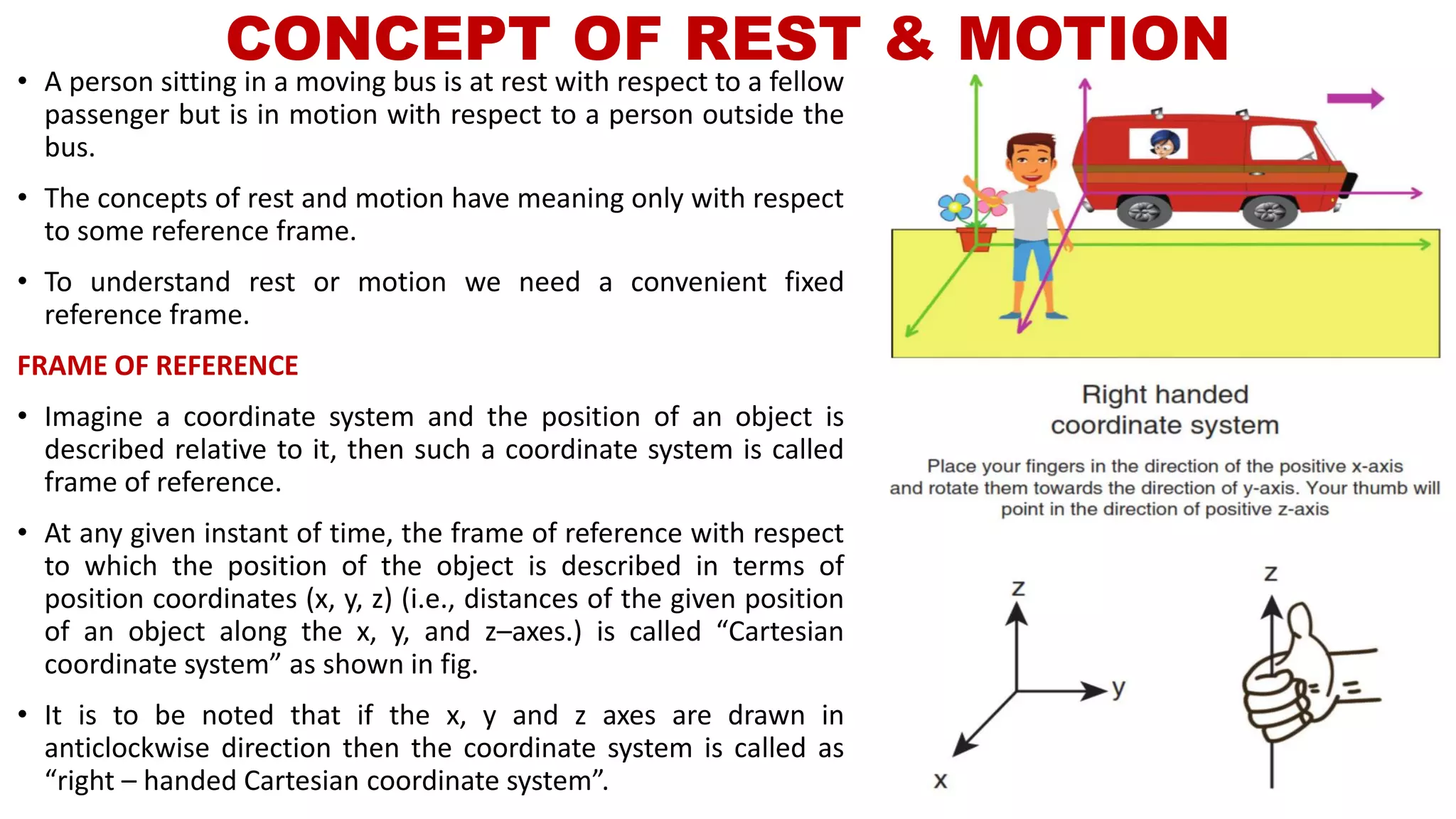
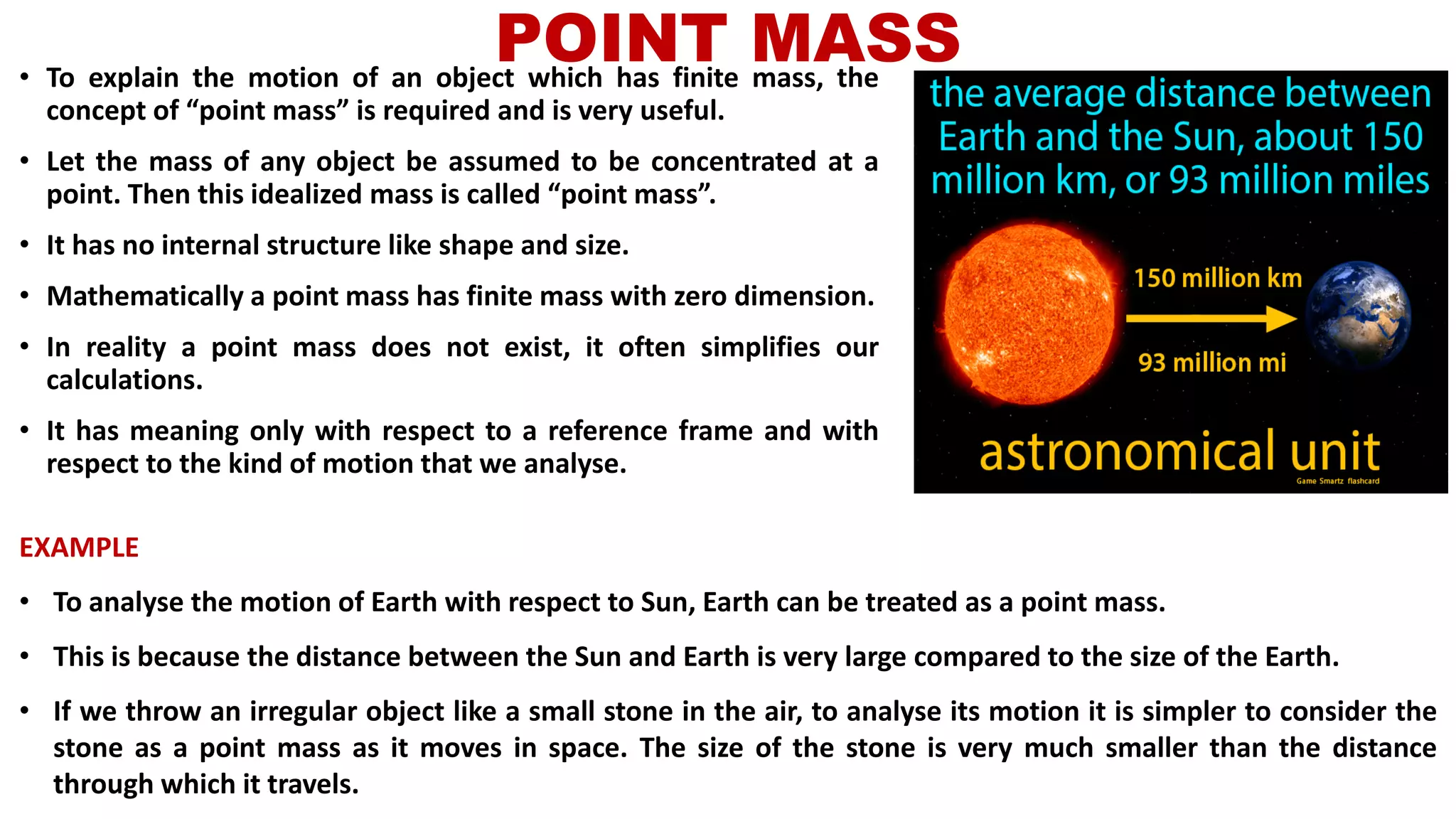
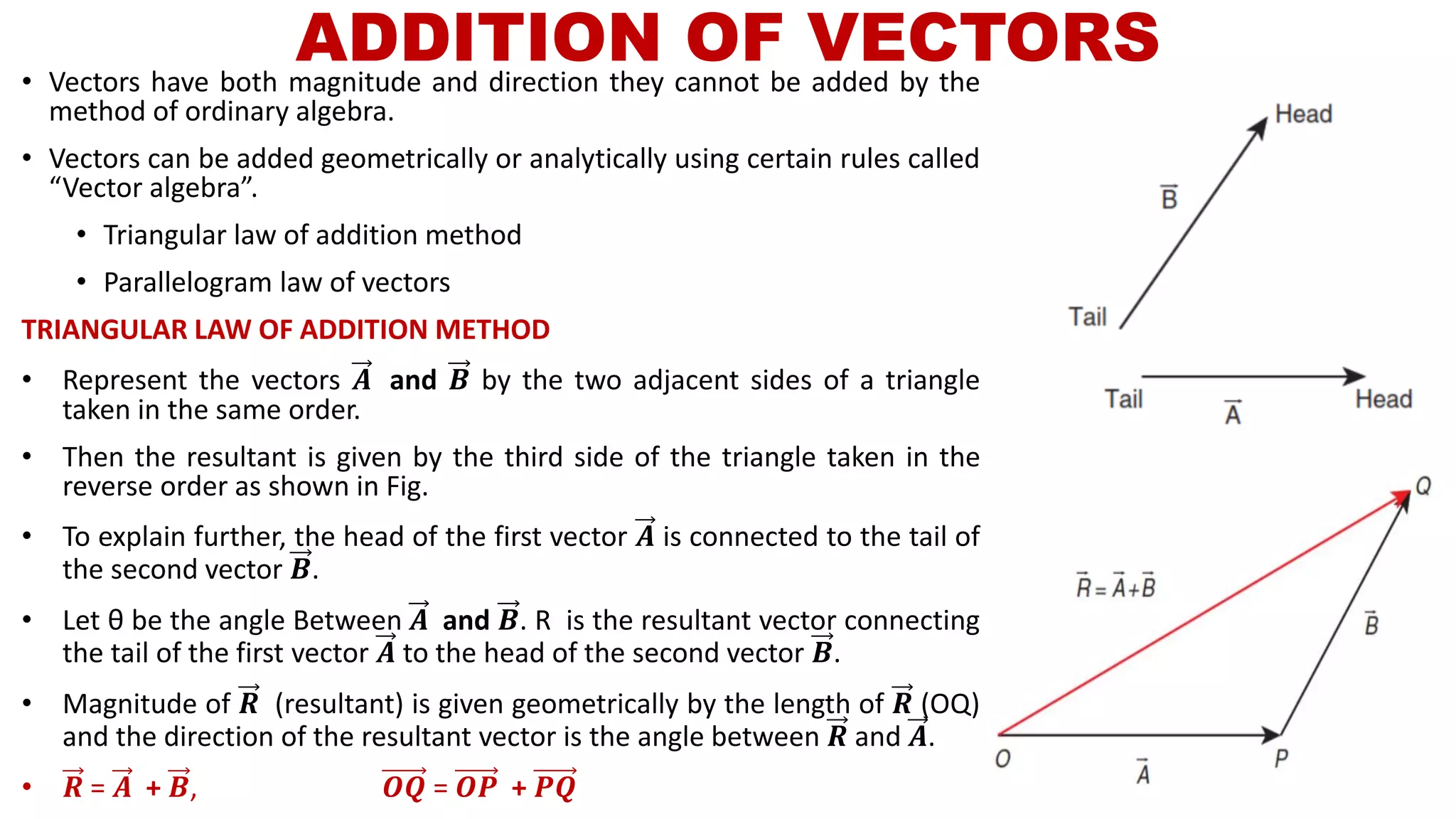
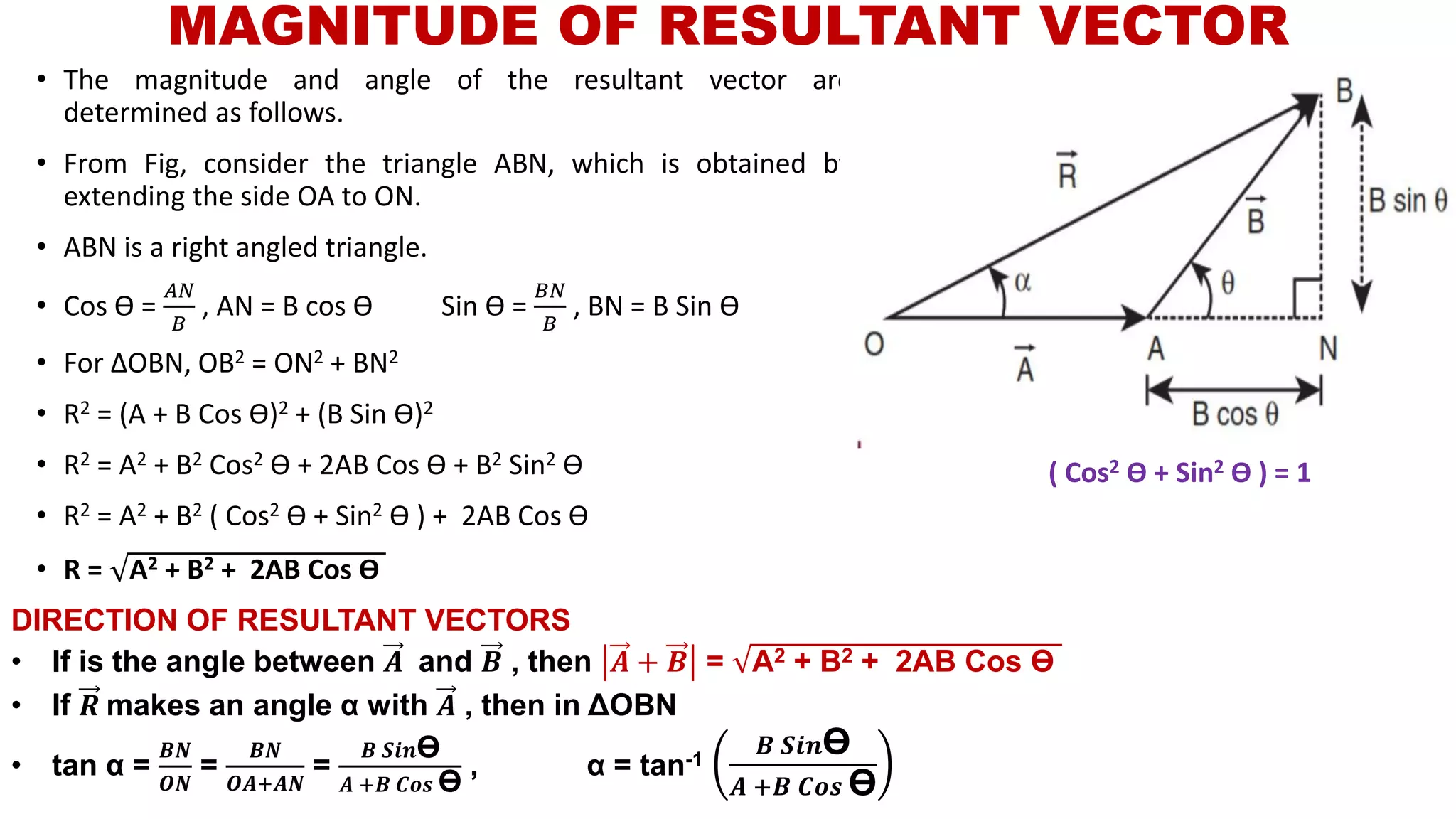
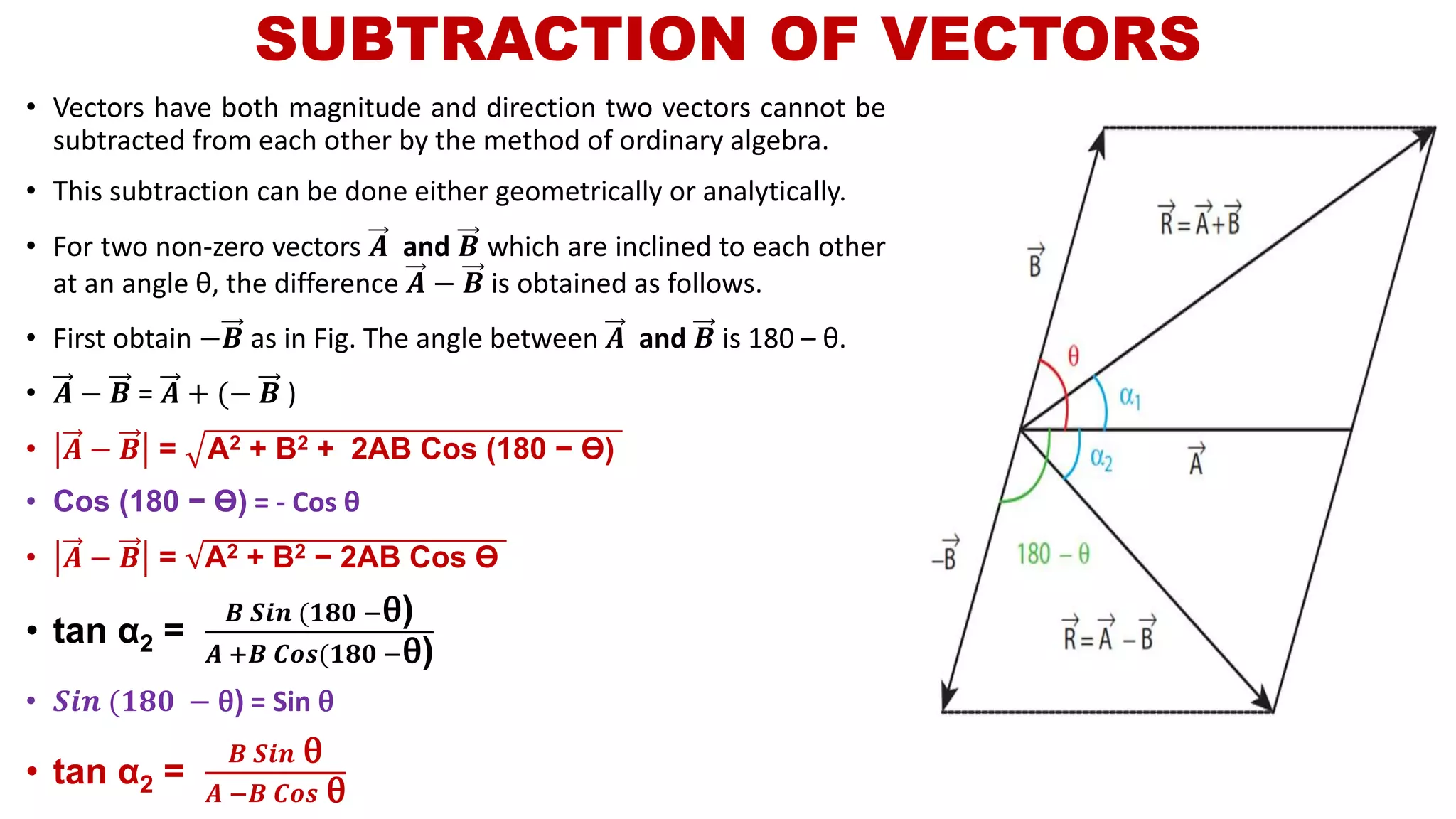
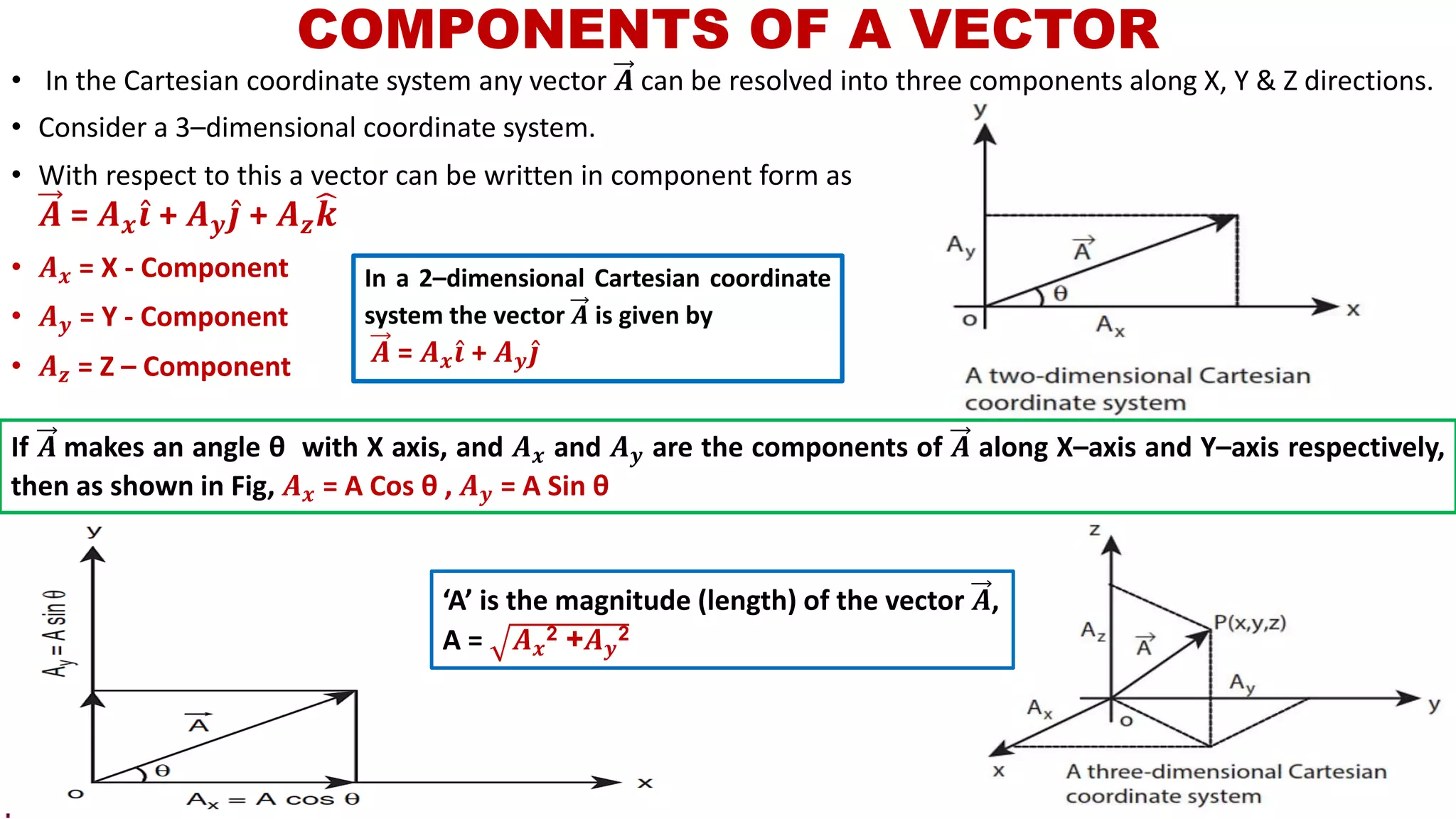
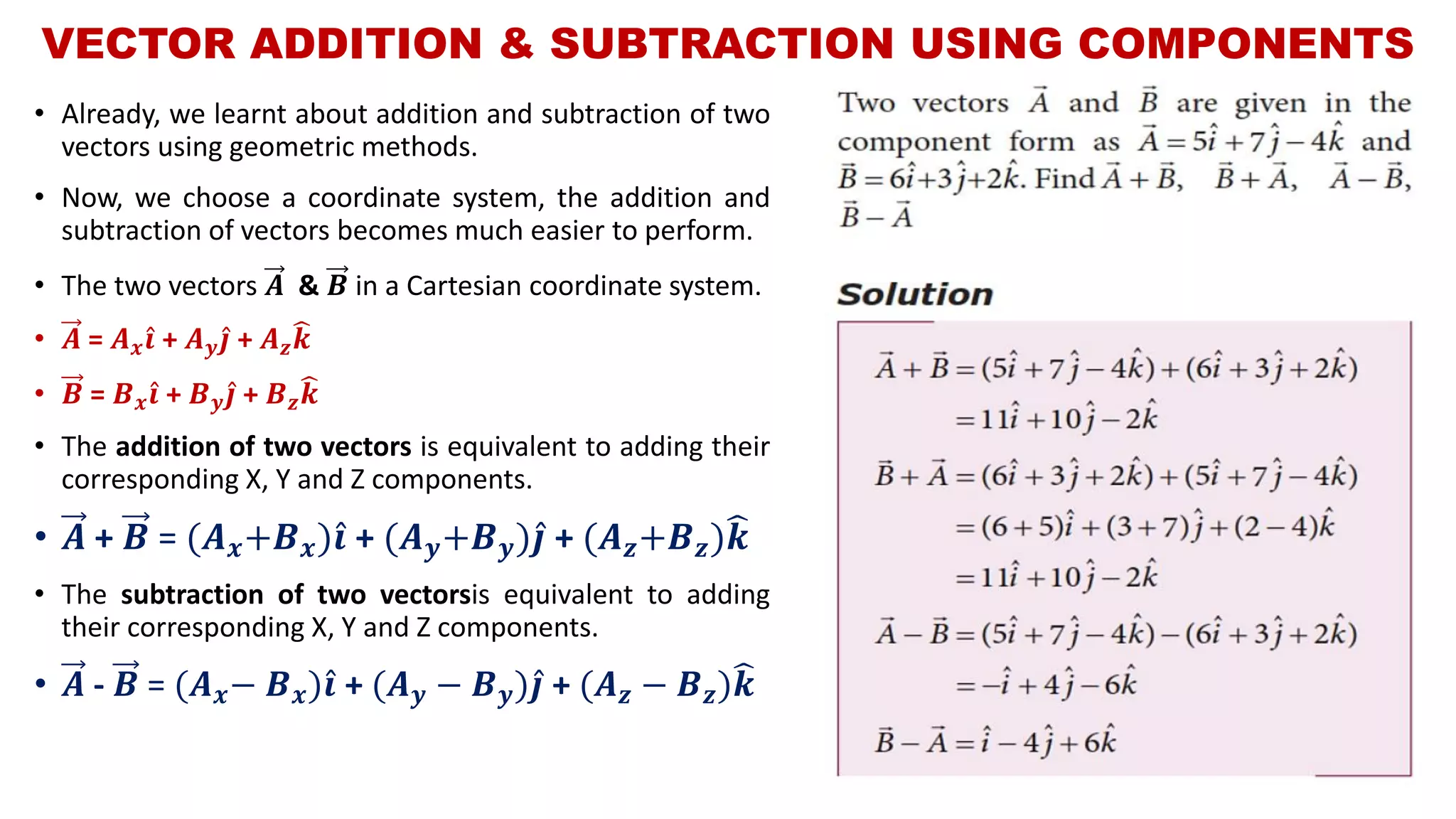
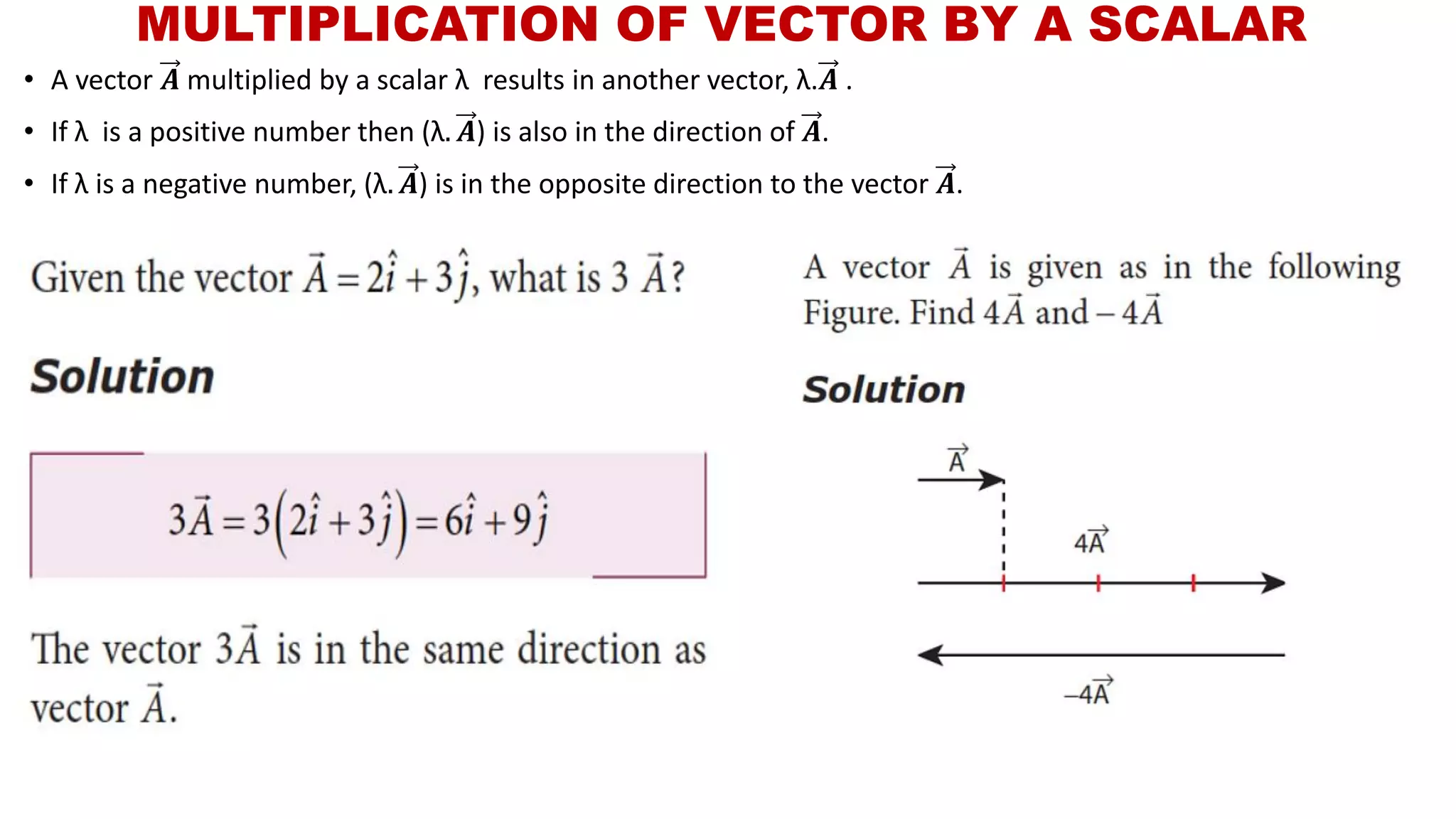
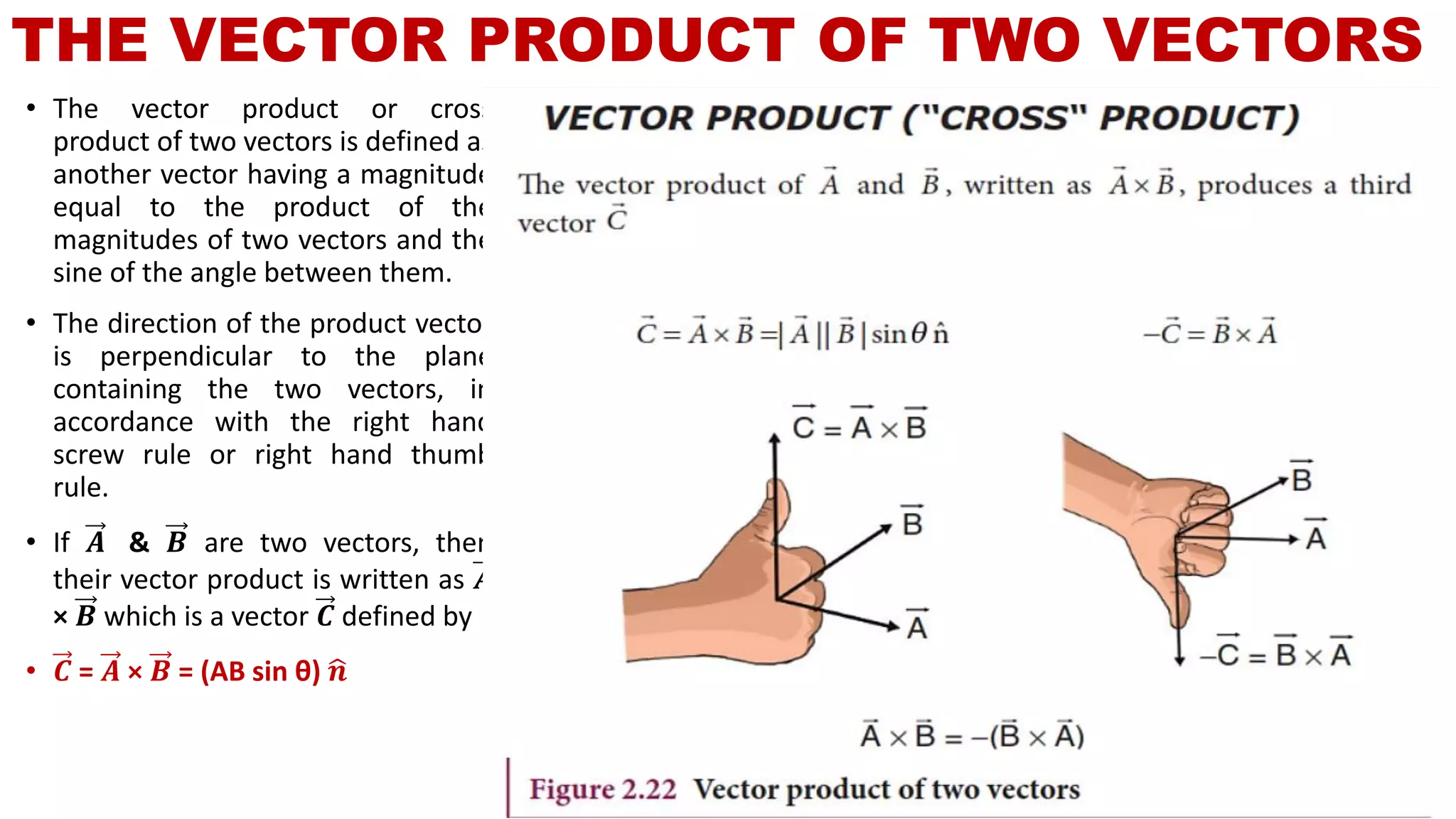
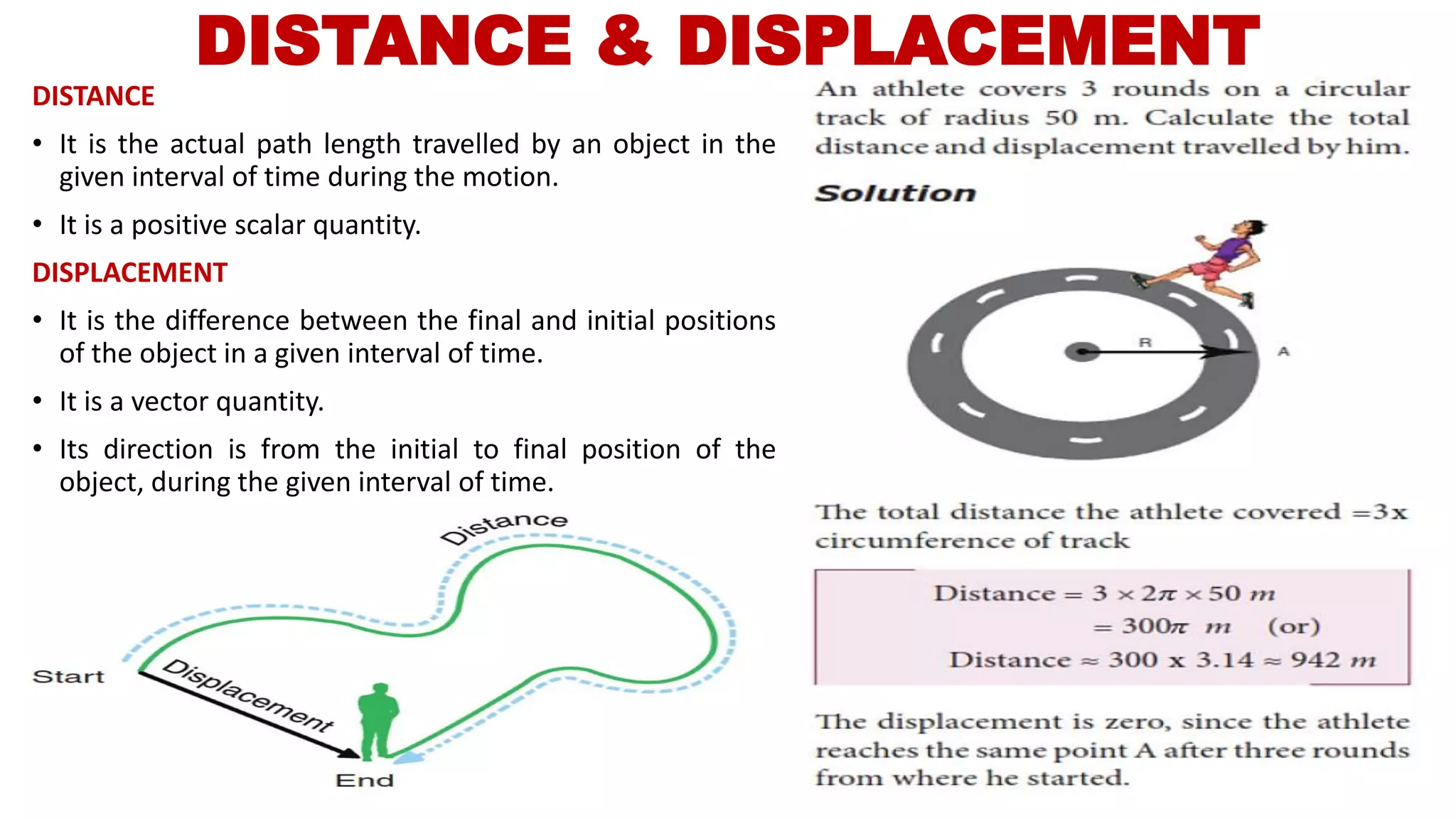
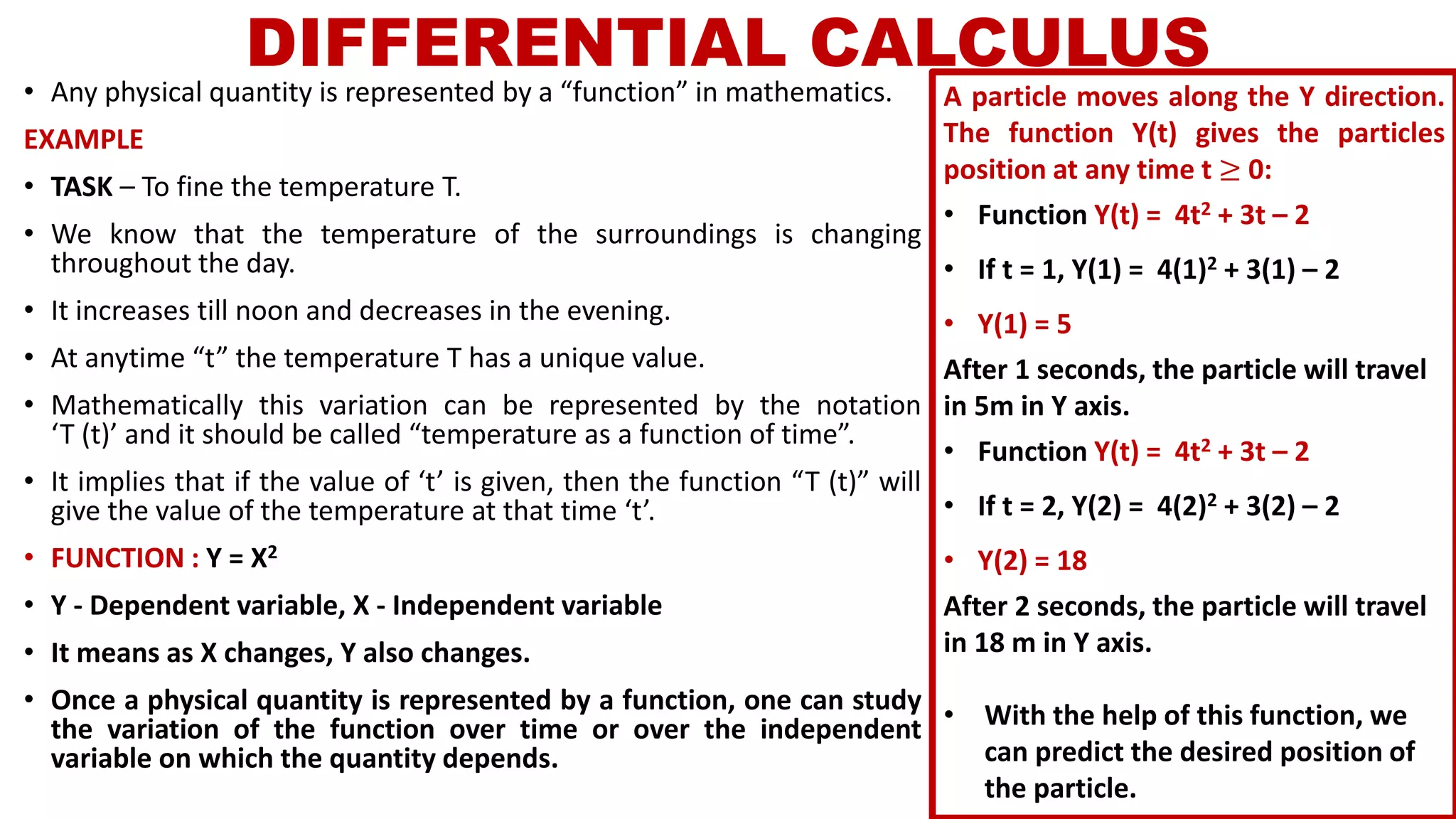
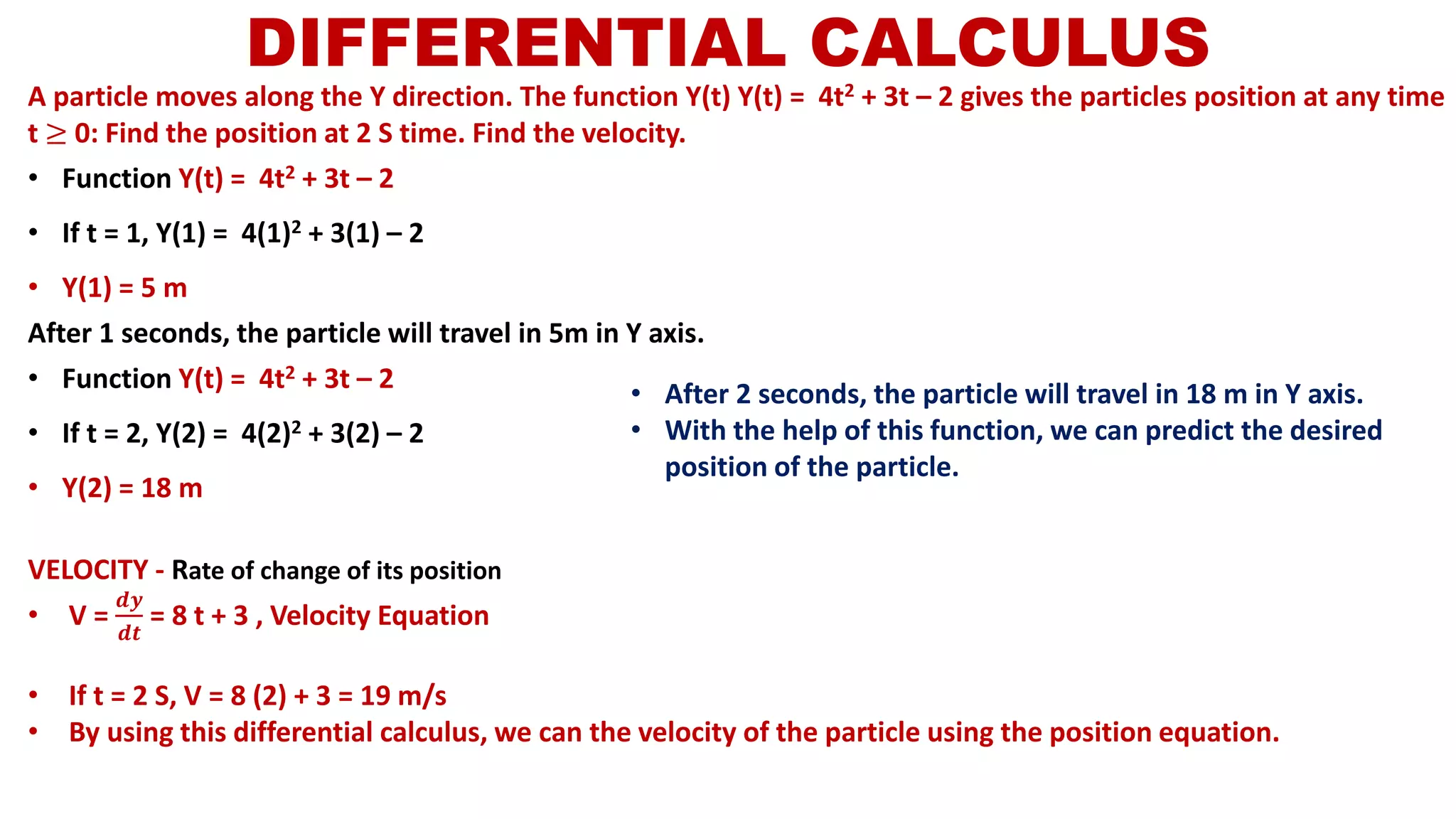
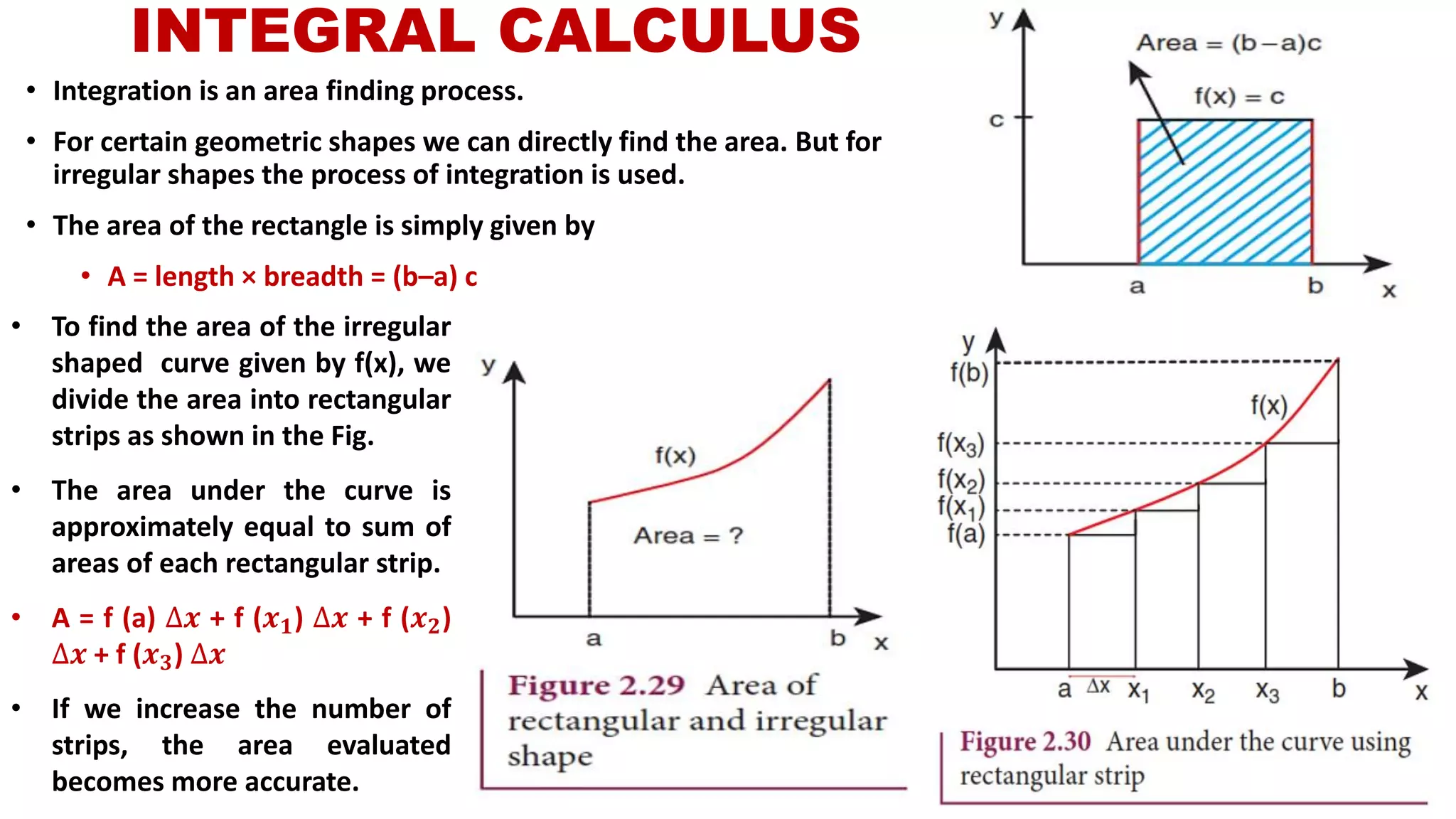
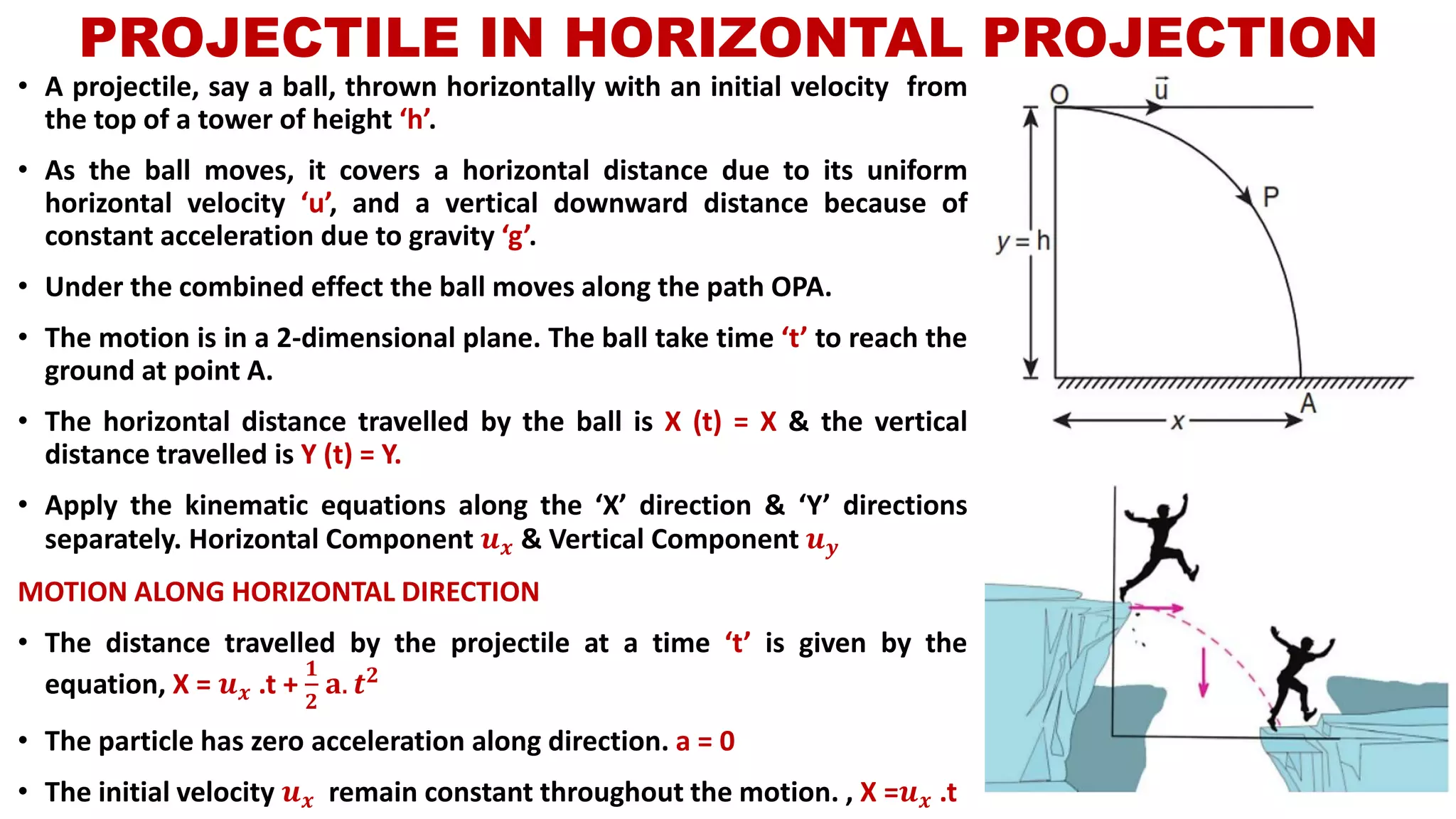
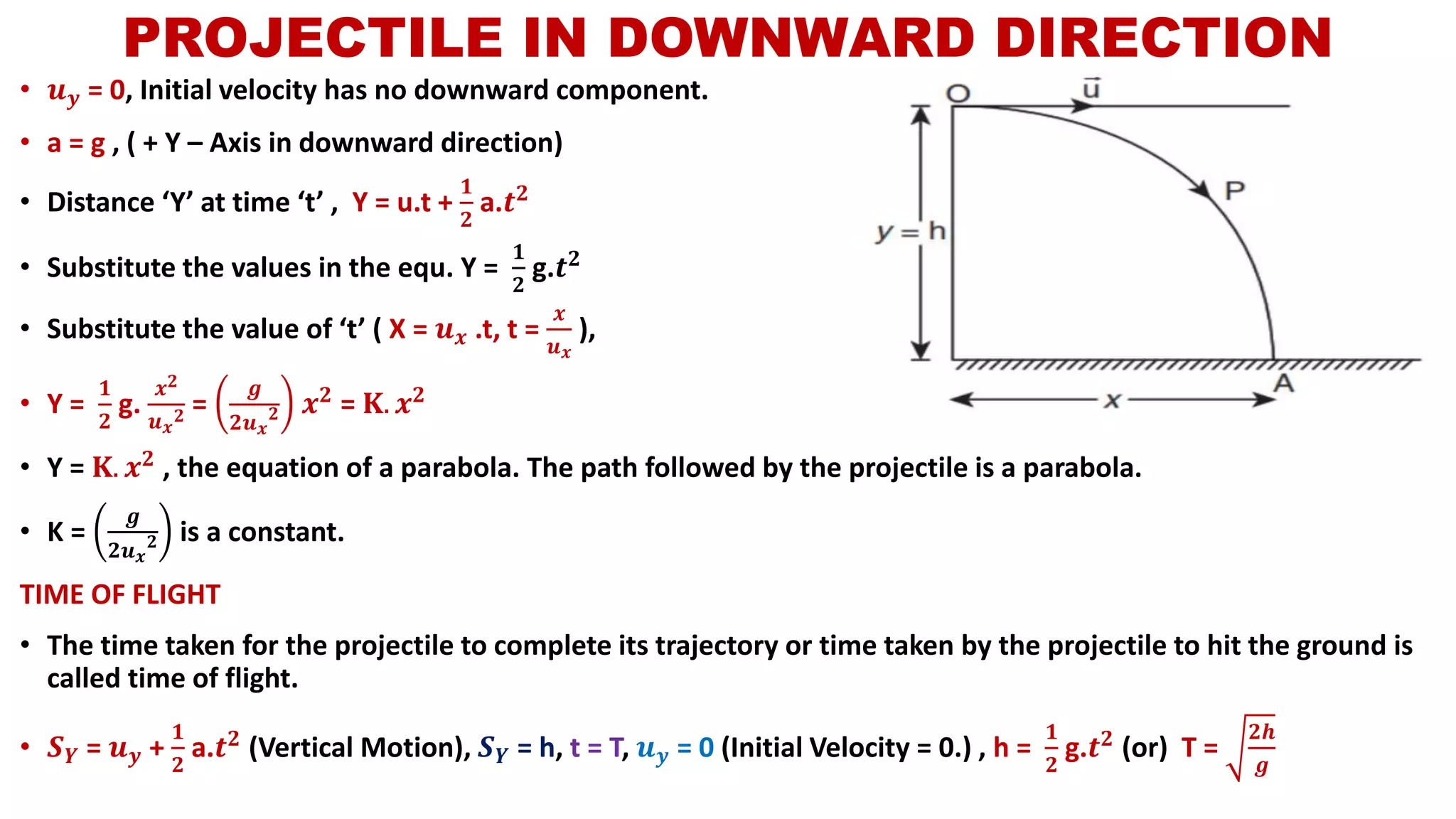
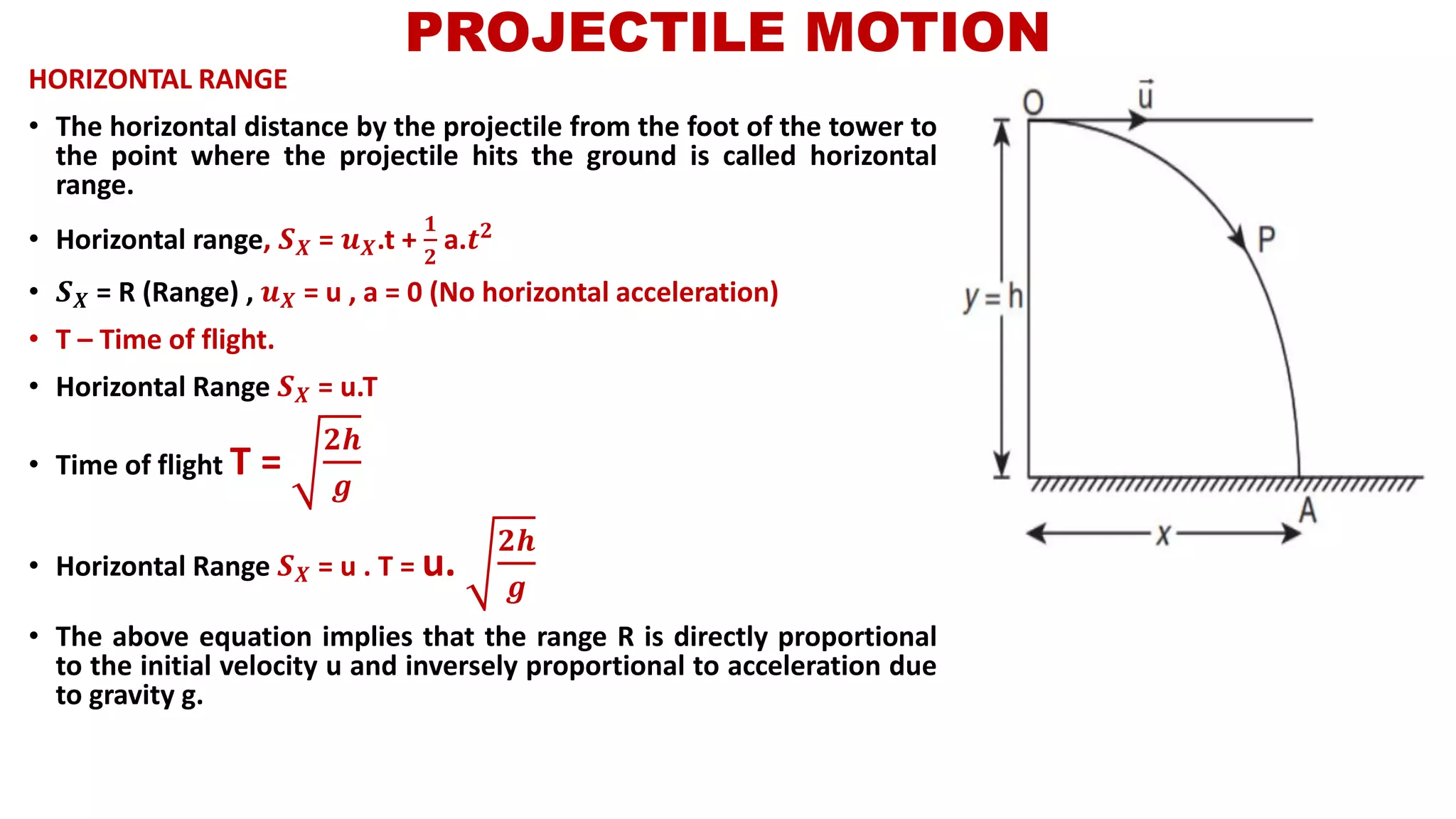
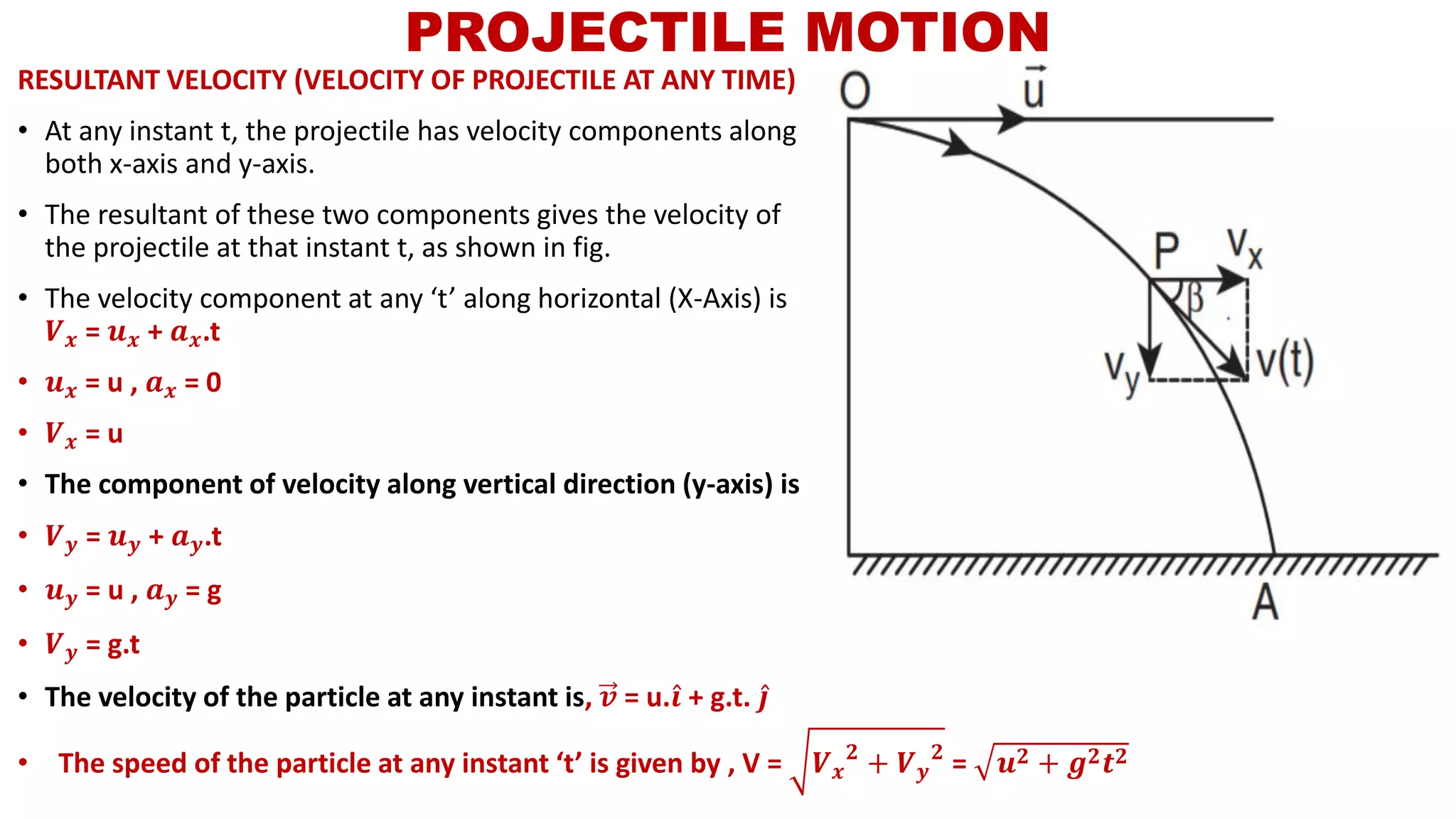
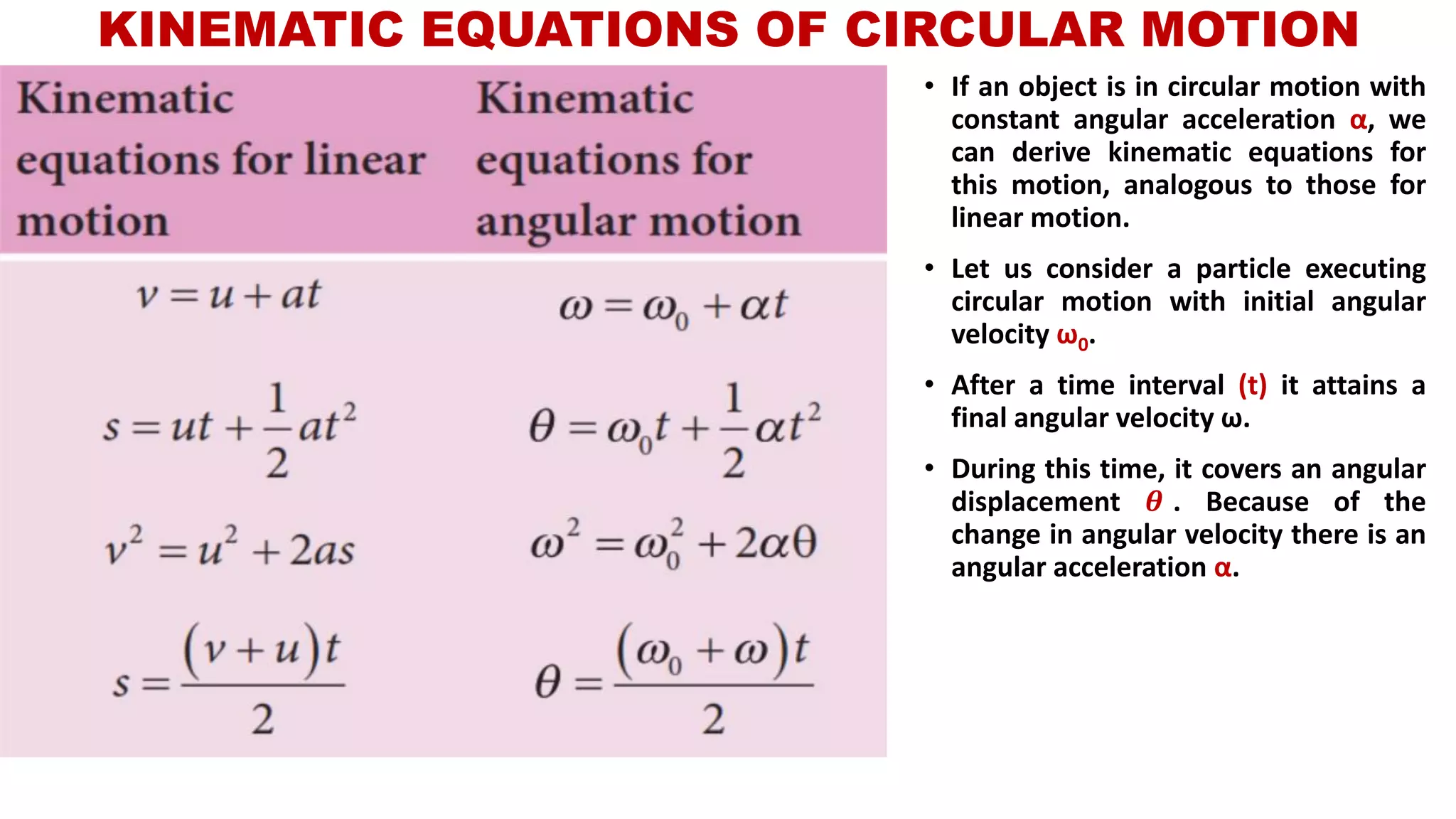
This document provides an introduction to the topic of kinematics in physics. It begins with introducing physics as an experimental science based on experiments and mathematics. It then discusses concepts related to motion such as frames of reference, types of motion including linear, circular, rotational, and vibratory motion. It also discusses motion in one, two and three dimensions. Key concepts in vector algebra like scalars, vectors, addition and subtraction of vectors are introduced. The document provides examples to explain these concepts in physics.