Download to read offline

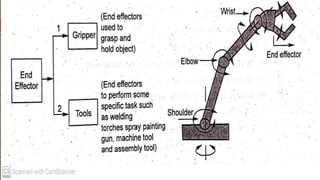
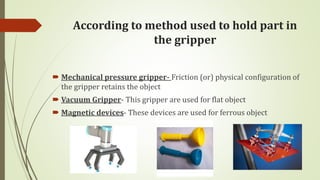
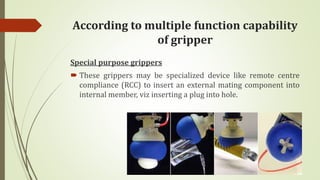
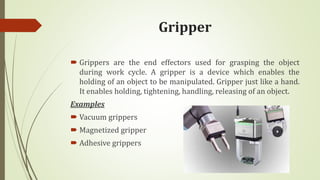

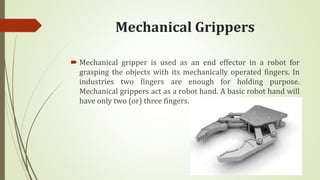

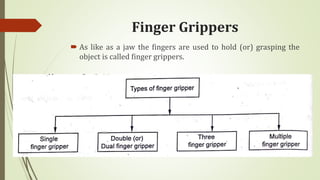






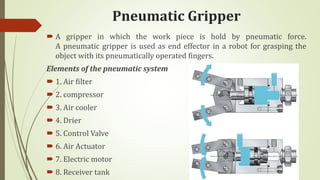
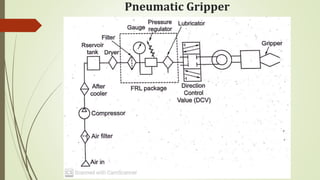
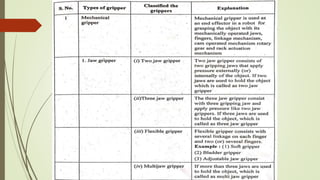

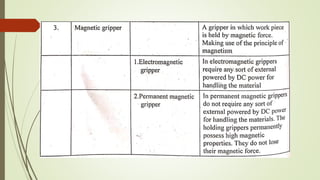
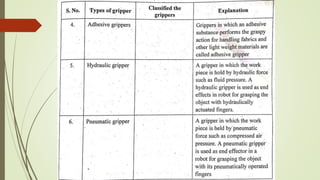
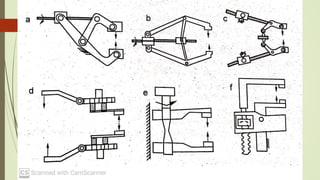
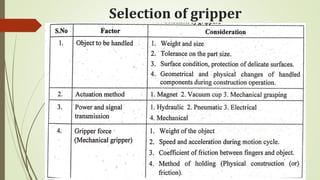
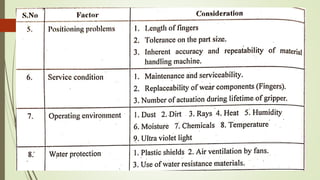
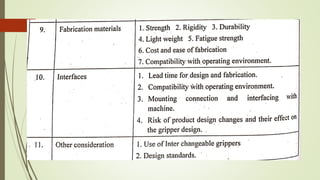

The document discusses various types of robot end effectors and grippers. It describes grippers classified based on the method used to hold objects like mechanical, vacuum, magnetic, etc. It also discusses gripper mechanisms, actuation methods, and factors to consider for gripper design and selection. The key types covered are mechanical, vacuum, magnetic, pneumatic, and hydraulic grippers.























































































