Kalman’s Beautiful Filter
(anintroduction)
George Kantor
presented to
Sensor Based Planning Lab
Carnegie Mellon University
December 8, 2000
2.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
What does a Kalman Filter do, anyway?
x k F k x k G k u k v k
y k H k x k w k
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1
x k n
u k m
y k p
F k G k H k
v k w k
Q k R k
( )
( )
( )
( ), ( ), ( )
( ), ( )
( ), ( )
is the -dimensional state vector (unknown)
is the -dimensional input vector (known)
is the -dimensional output vector (known, measured)
are appropriately dimensioned system matrices (known)
are zero - mean, white Gaussian noise with (known)
covariance matrices
Given the linear dynamical system:
the Kalman Filter is a recursion that provides the
“best” estimate of the state vector x.
3.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
What’s so great about that?
• noise smoothing (improve noisy measurements)
• state estimation (for state feedback)
• recursive (computes next estimate using only most
recent measurement)
x k F k x k G k u k v k
y k H k x k w k
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1
4.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
How does it work?
x k F k x k G k u k v k
y k H k x k w k
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
1
)
|
1
(
ˆ
)
(
)
(
ˆ
)
(
)
(
)
|
(
ˆ
)
(
)
|
1
(
ˆ
k
k
x
k
H
k
y
k
u
k
G
k
k
x
k
F
k
k
x
1. prediction based on last estimate:
2. calculate correction based on prediction and current measurement:
)
|
1
(
ˆ
),
1
( k
k
x
k
y
f
x
3. update prediction: x
k
k
x
k
k
x
)
|
1
(
ˆ
)
1
|
1
(
ˆ
5.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
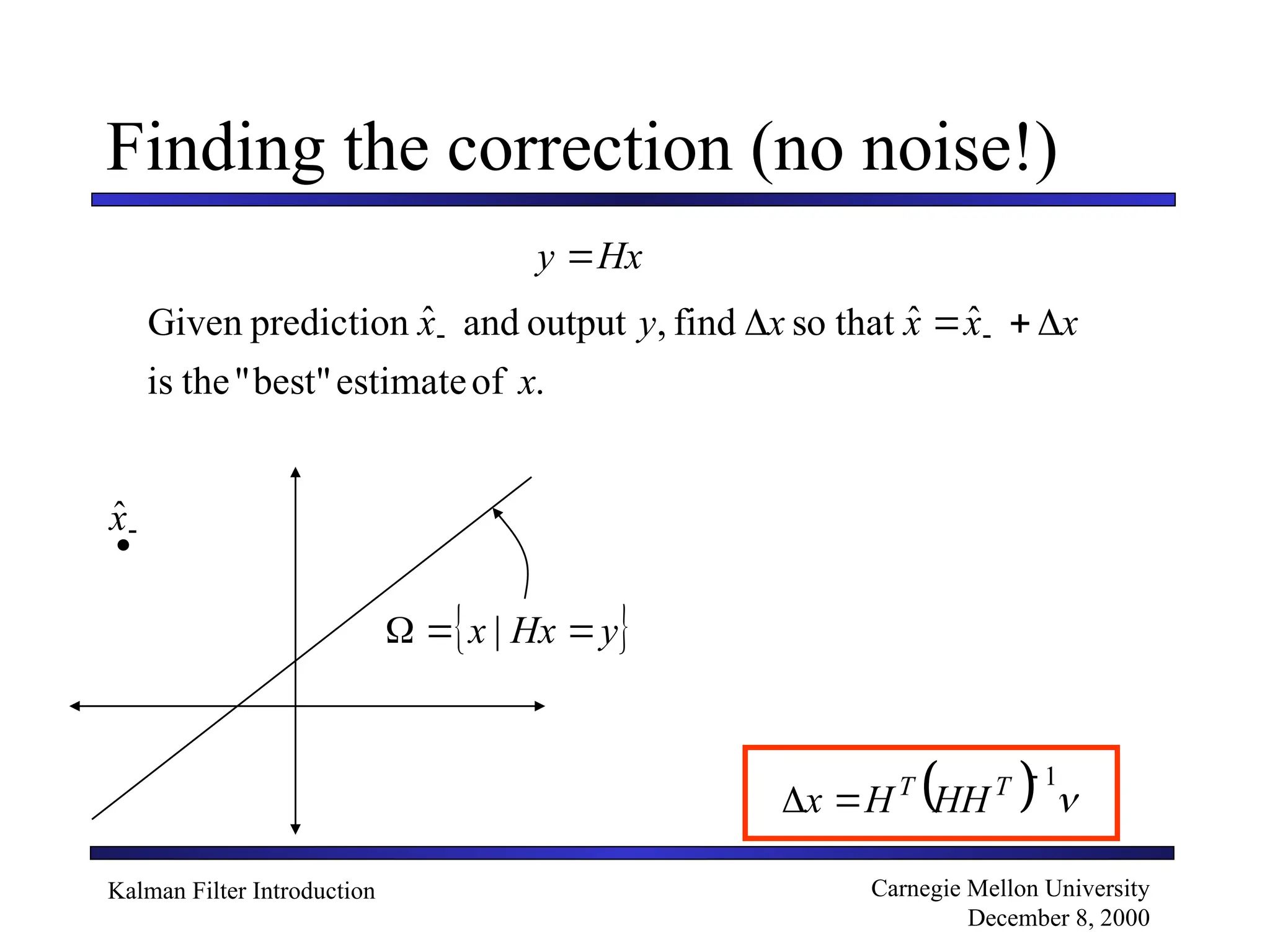
Finding the correction (no noise!)
.
of
estimate
best"
"
the
is
ˆ
ˆ
that
so
find
,
output
and
ˆ
prediction
Given
x
x
x
x
x
y
x
Hx
y
y
Hx
x
|
x̂
1
T
T
HH
H
x
6.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
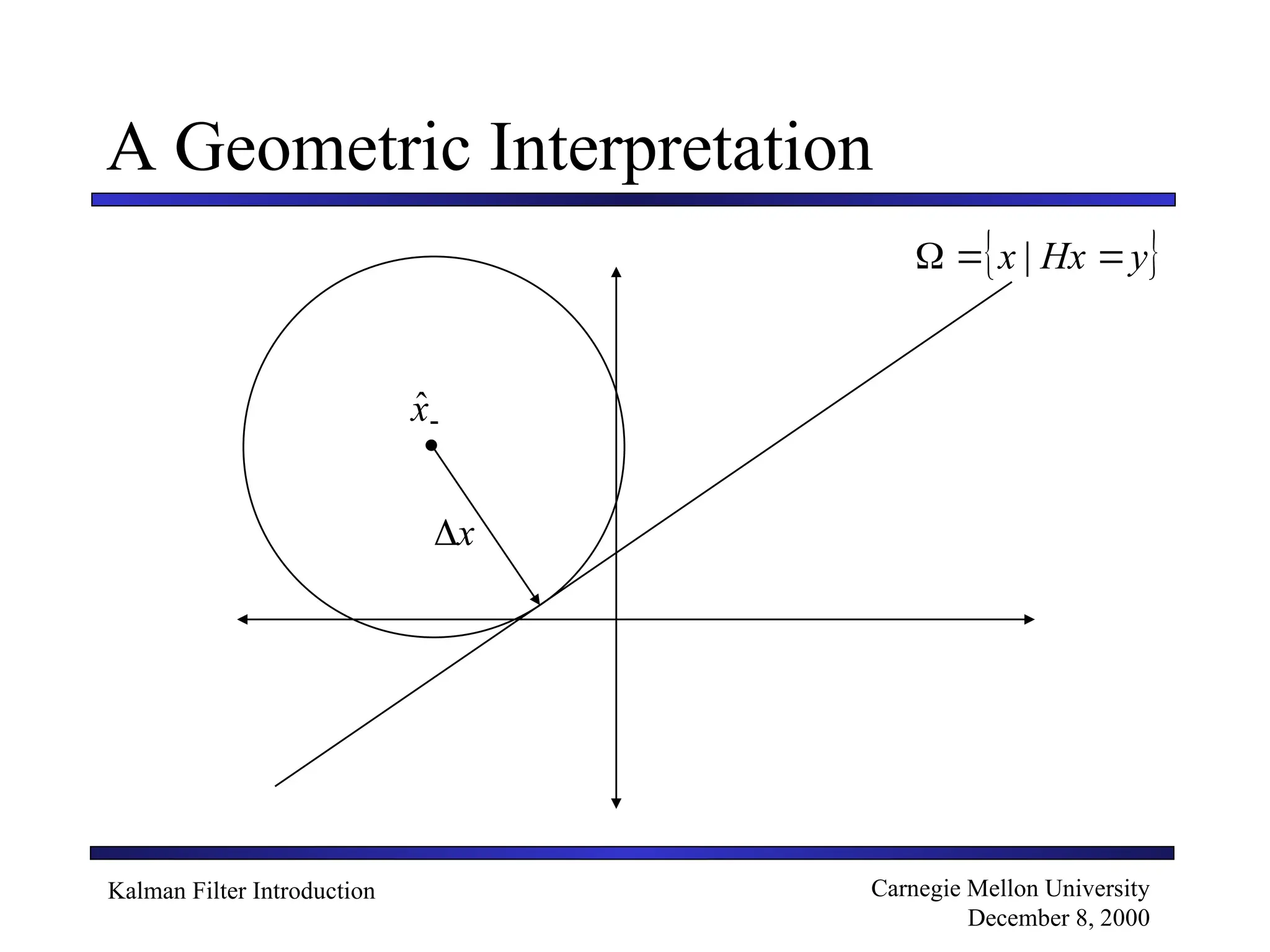
A Geometric Interpretation
y
Hx
x
|
x̂
x
7.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
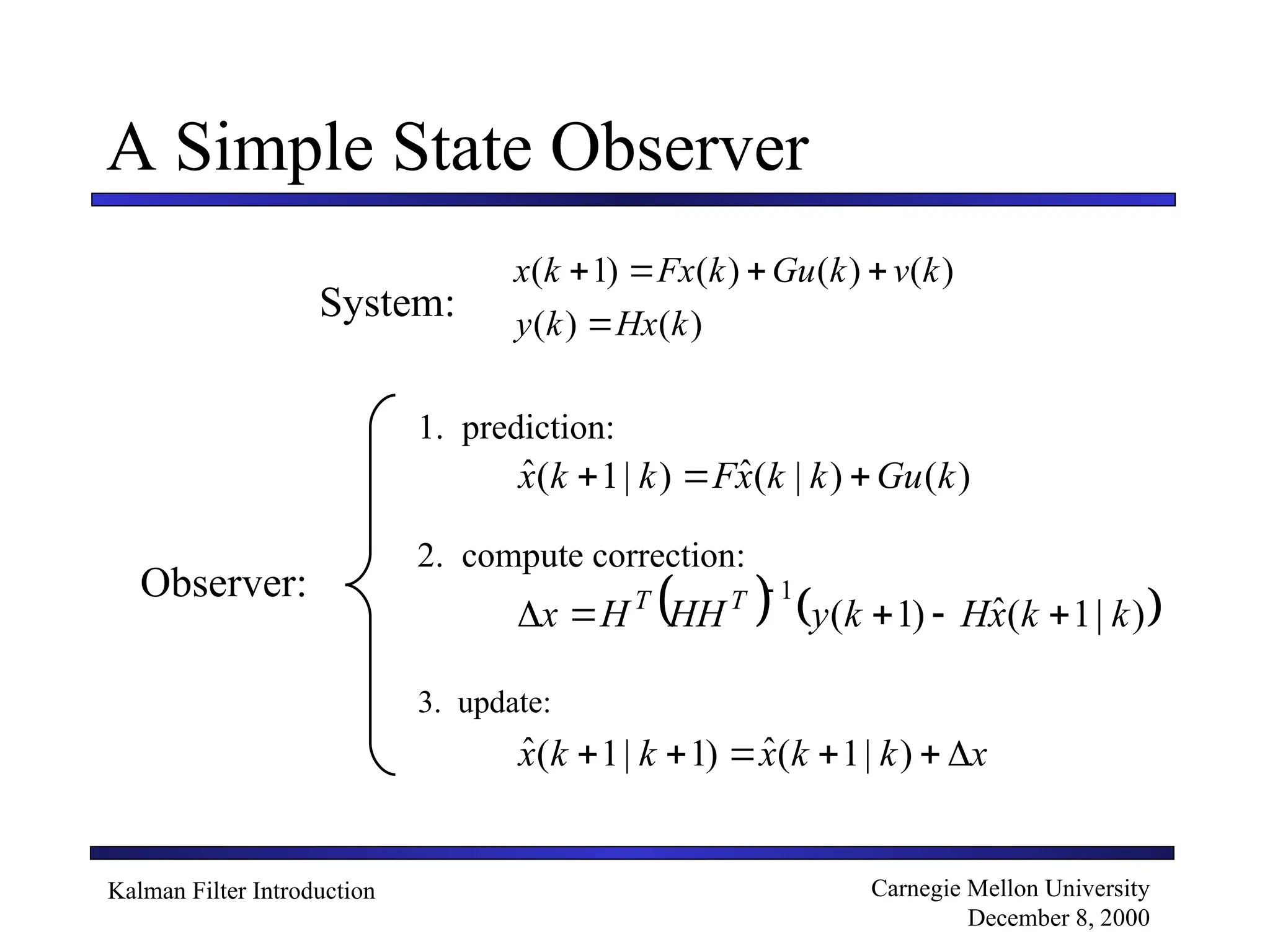
A Simple State Observer
)
(
)
(
)
(
)
(
)
(
)
1
(
k
Hx
k
y
k
v
k
Gu
k
Fx
k
x
)
(
)
|
(
ˆ
)
|
1
(
ˆ k
Gu
k
k
x
F
k
k
x
)
|
1
(
ˆ
)
1
(
1
k
k
x
H
k
y
HH
H
x T
T
x
k
k
x
k
k
x
)
|
1
(
ˆ
)
1
|
1
(
ˆ
System:
1. prediction:
2. compute correction:
3. update:
Observer:
8.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
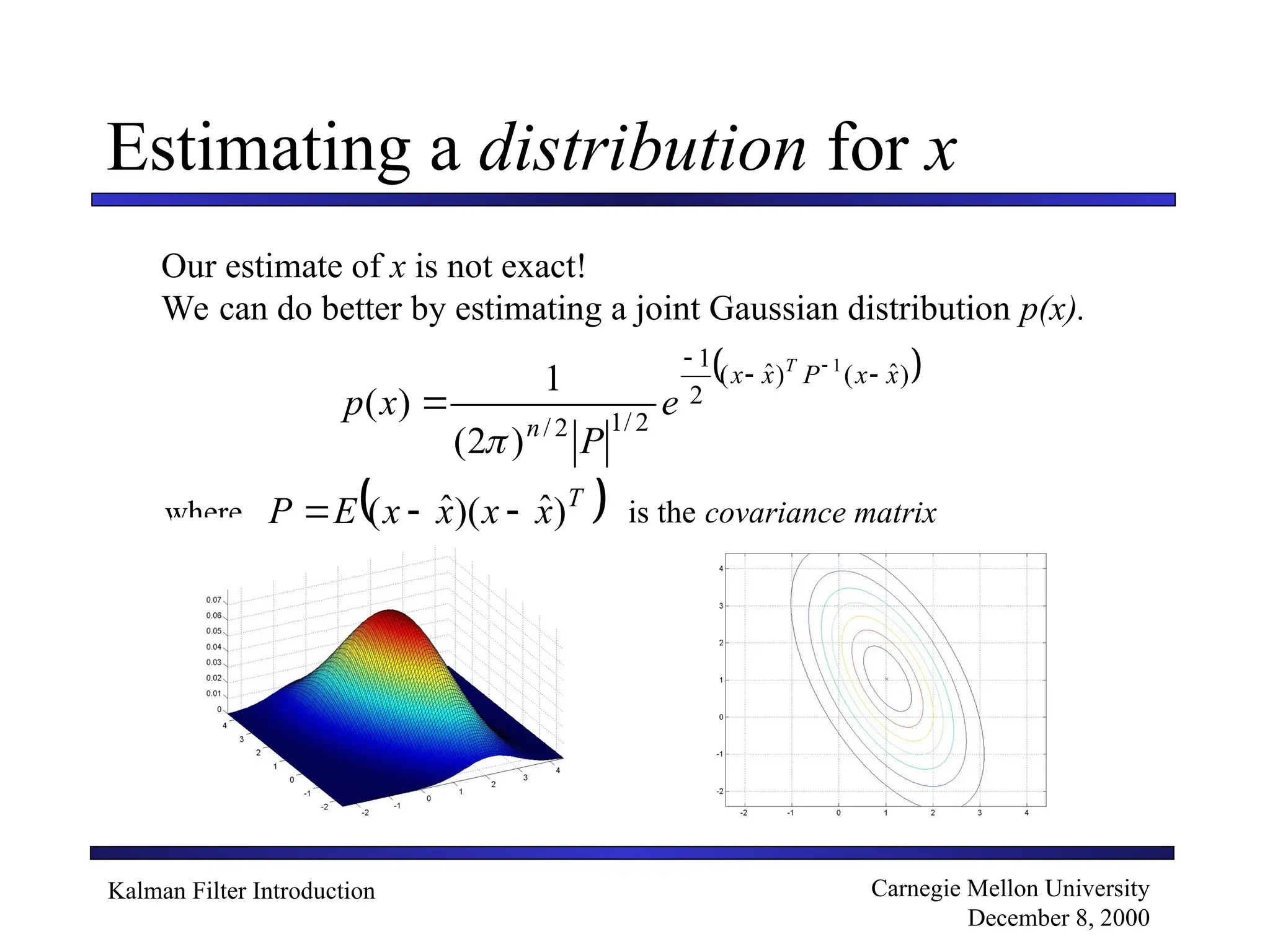
where is the covariance matrix
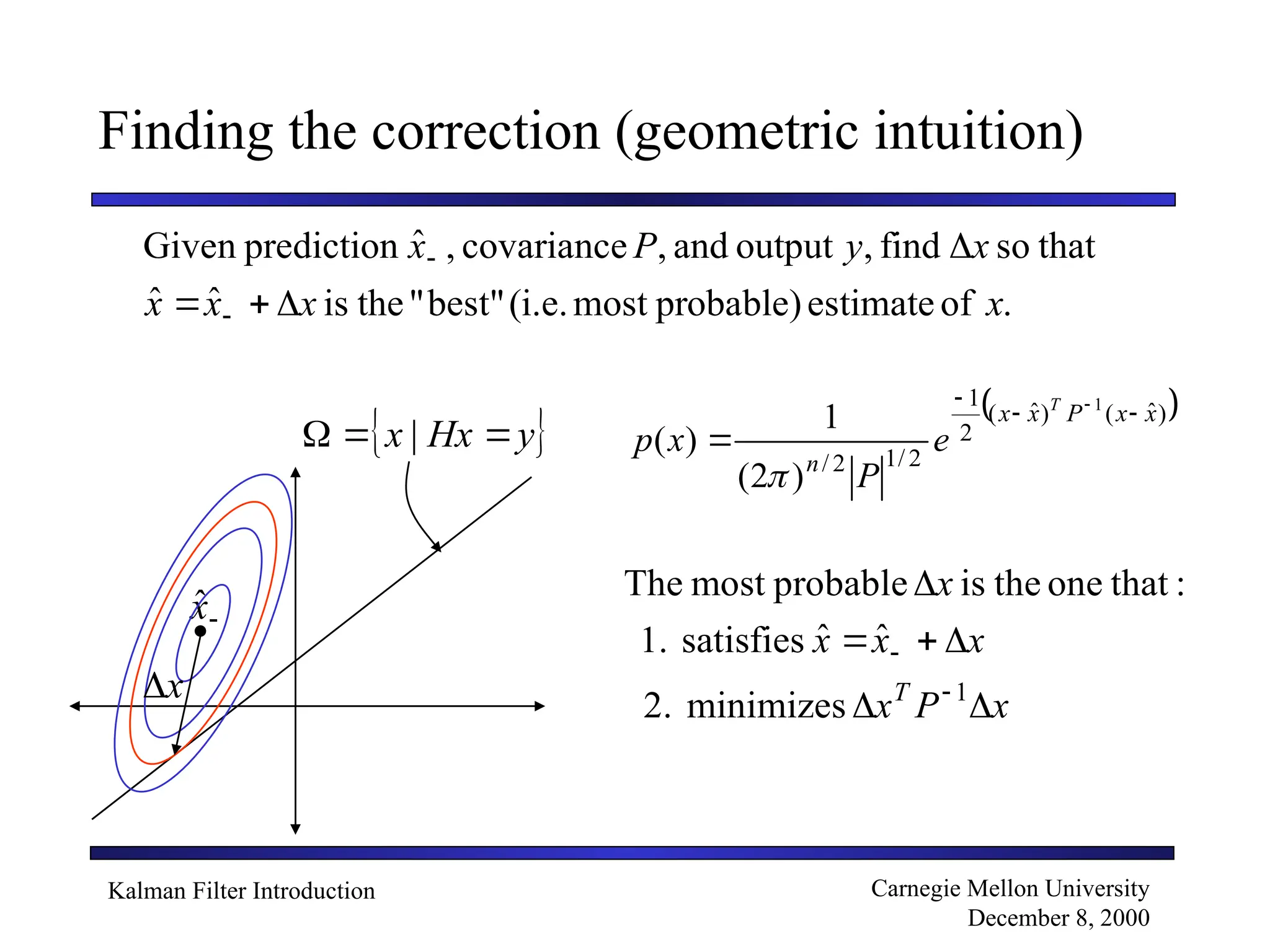
Estimating a distribution for x
Our estimate of x is not exact!
We can do better by estimating a joint Gaussian distribution p(x).
)
ˆ
(
)
ˆ
(
2
1
2
/
1
2
/
1
)
2
(
1
)
(
x
x
P
x
x
n
T
e
P
x
p
T
x
x
x
x
E
P )
ˆ
)(
ˆ
(
9.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
Finding the correction (geometric intuition)
.
of
estimate
probable)
most
(i.e.
best"
"
the
is
ˆ
ˆ
that
so
find
,
output
and
,
covariance
,
ˆ
prediction
Given
x
x
x
x
x
y
P
x
y
Hx
x
|
x̂
x
x
P
x
x
x
x
x
T
1
minimizes
2.
ˆ
ˆ
satisfies
1.
:
that
one
the
is
probable
most
The
)
ˆ
(
)
ˆ
(
2
1
2
/
1
2
/
1
)
2
(
1
)
(
x
x
P
x
x
n
T
e
P
x
p
10.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
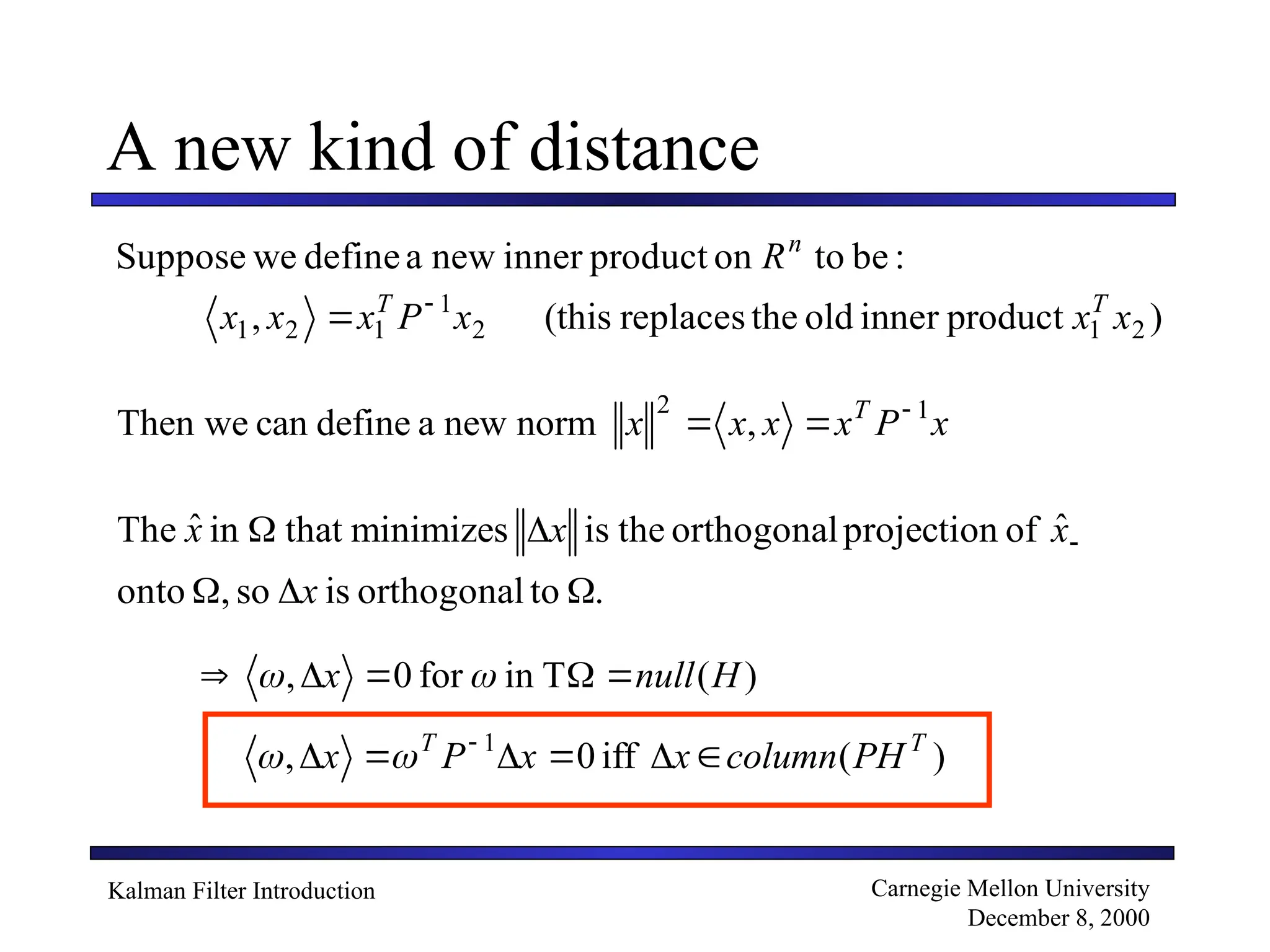
A new kind of distance
:
be
to
on
product
inner
new
a
define
we
Suppose n
R
)
product
inner
old
the
replaces
(this
, 2
1
2
1
1
2
1 x
x
x
P
x
x
x T
T
x
P
x
x
x
x T 1
2
,
norm
new
a
define
can
Then we
.
to
orthogonal
is
so
,
onto
ˆ
of
projection
orthogonal
the
is
minimizes
that
in
ˆ
The
x
x
x
x
)
(
T
in
for
0
, H
null
x
)
(
iff
0
, 1 T
T
PH
column
x
x
P
x
11.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
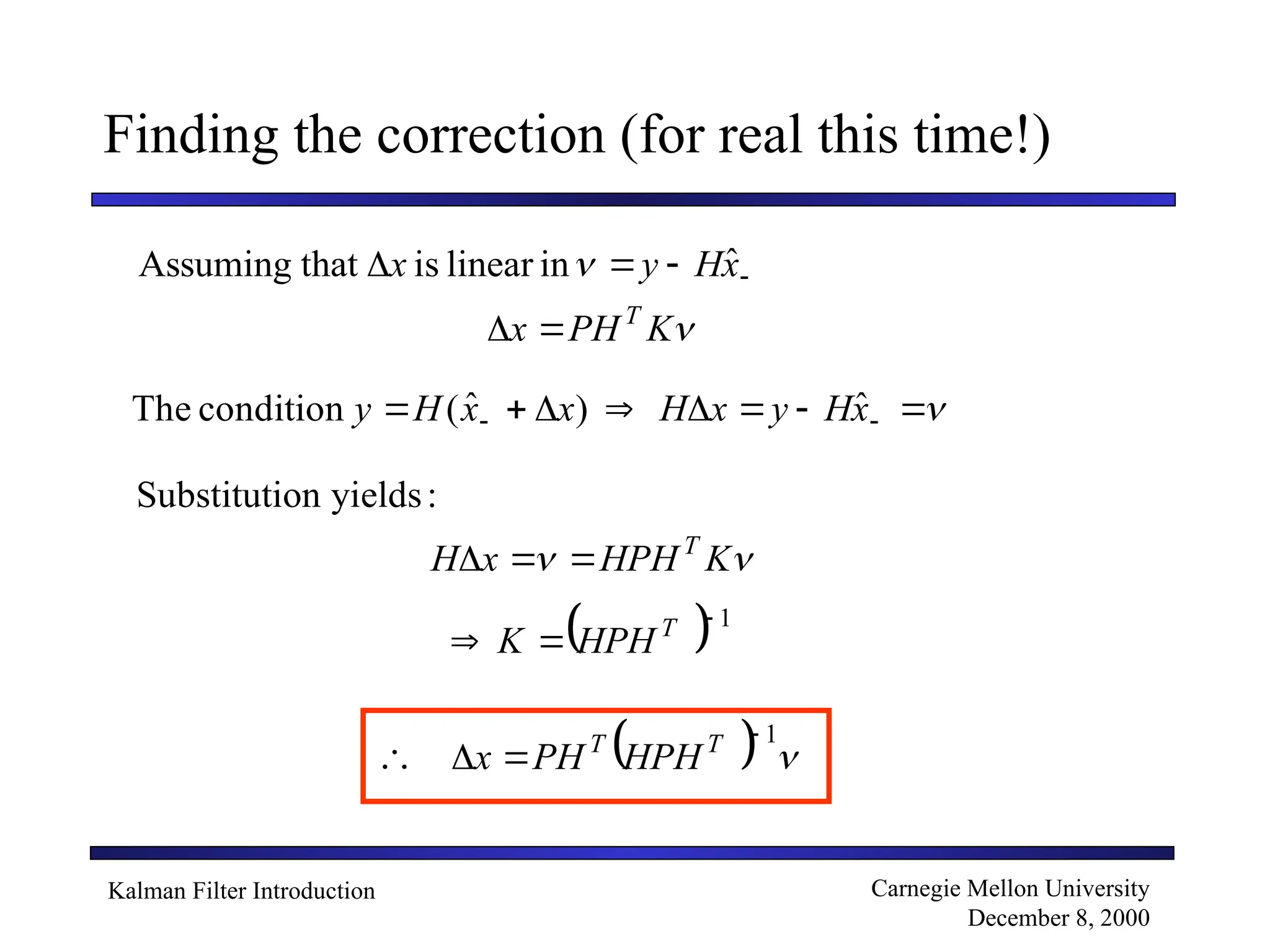
Finding the correction (for real this time!)
ˆ
in
linear
is
that
Assuming
x
H
y
x
K
PH
x T
x
H
y
x
H
x
x
H
y ˆ
)
ˆ
(
condition
The
:
yields
on
Substituti
K
HPH
x
H T
1
T
HPH
K
1
T
T
HPH
PH
x
12.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
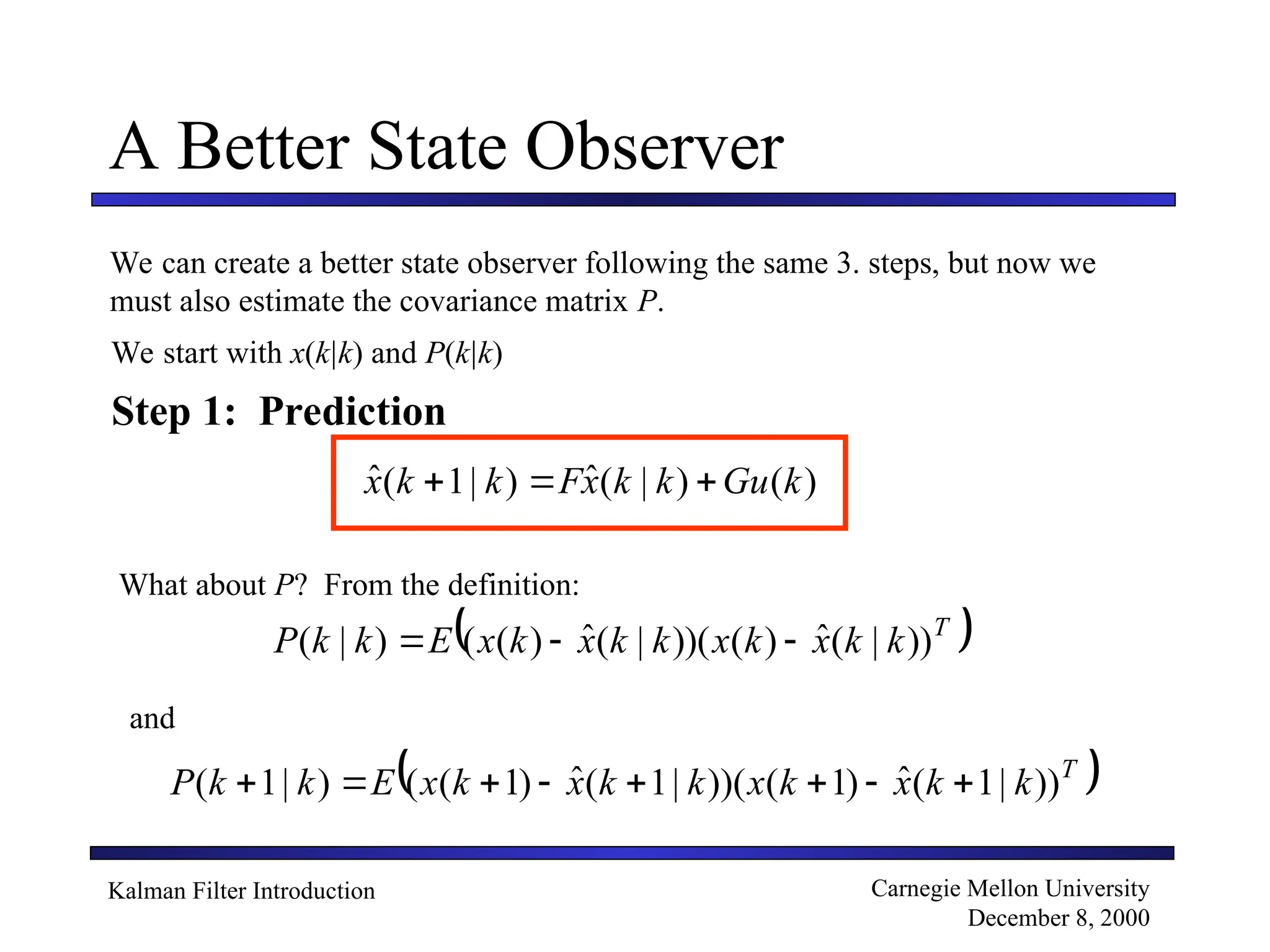
A Better State Observer
We can create a better state observer following the same 3. steps, but now we
must also estimate the covariance matrix P.
Step 1: Prediction
We start with x(k|k) and P(k|k)
)
(
)
|
(
ˆ
)
|
1
(
ˆ k
Gu
k
k
x
F
k
k
x
What about P? From the definition:
T
k
k
x
k
x
k
k
x
k
x
E
k
k
P ))
|
(
ˆ
)
(
))(
|
(
ˆ
)
(
(
)
|
(
and
T
k
k
x
k
x
k
k
x
k
x
E
k
k
P ))
|
1
(
ˆ
)
1
(
))(
|
1
(
ˆ
)
1
(
(
)
|
1
(
13.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
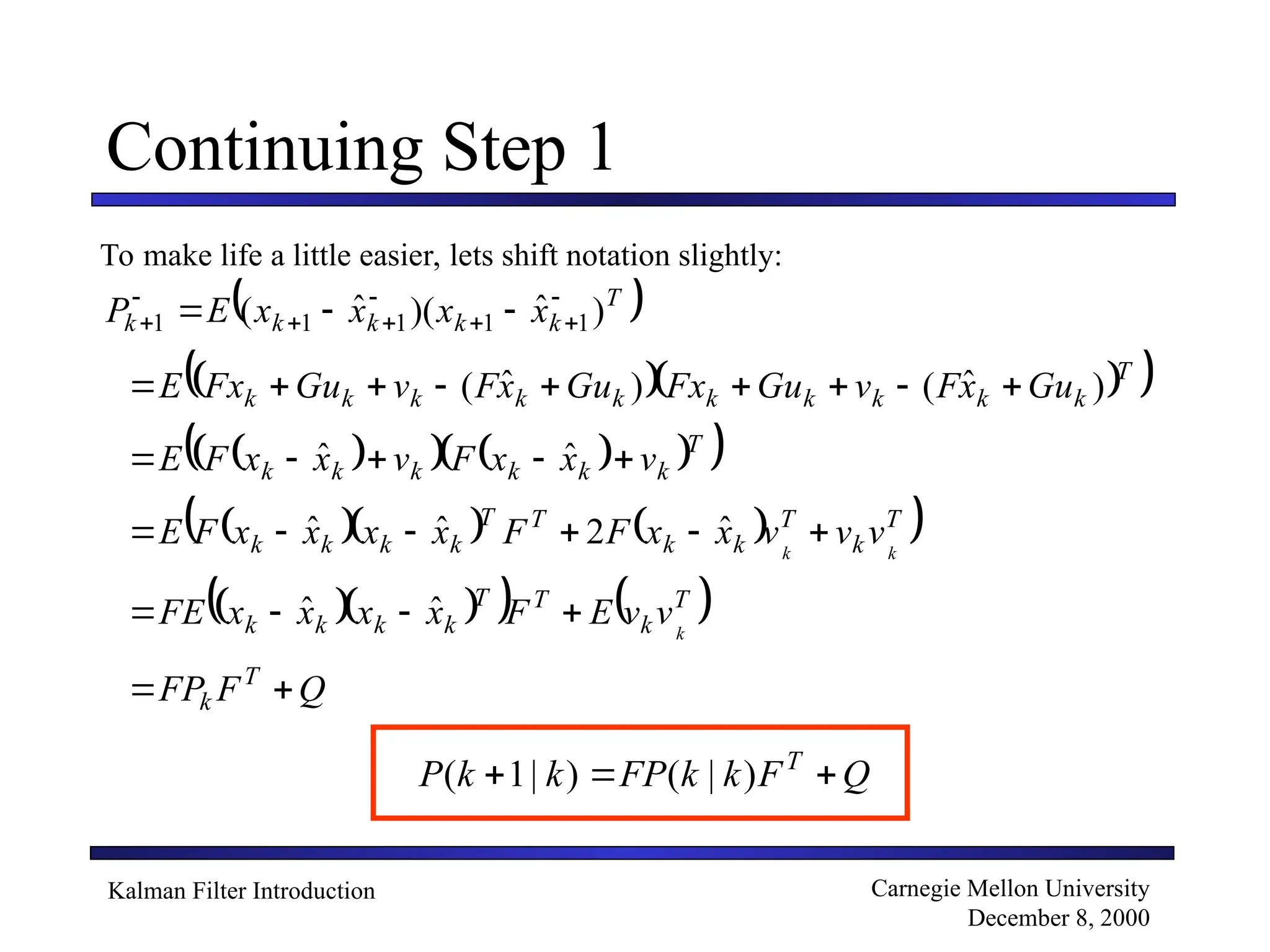
Continuing Step 1
To make life a little easier, lets shift notation slightly:
T
k
k
k
k
k x
x
x
x
E
P )
ˆ
)(
ˆ
( 1
1
1
1
1
T
k
k
k
k
k
k
k
k
k
k Gu
x
F
v
Gu
Fx
Gu
x
F
v
Gu
Fx
E )
ˆ
(
)
ˆ
(
T
k
k
k
k
k
k v
x
x
F
v
x
x
F
E
ˆ
ˆ
T
k
T
k
k
T
T
k
k
k
k k
k
v
v
v
x
x
F
F
x
x
x
x
F
E
ˆ
2
ˆ
ˆ
T
k
T
T
k
k
k
k k
v
v
E
F
x
x
x
x
FE
ˆ
ˆ
Q
F
FP T
k
Q
F
k
k
FP
k
k
P T
)
|
(
)
|
1
(
14.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
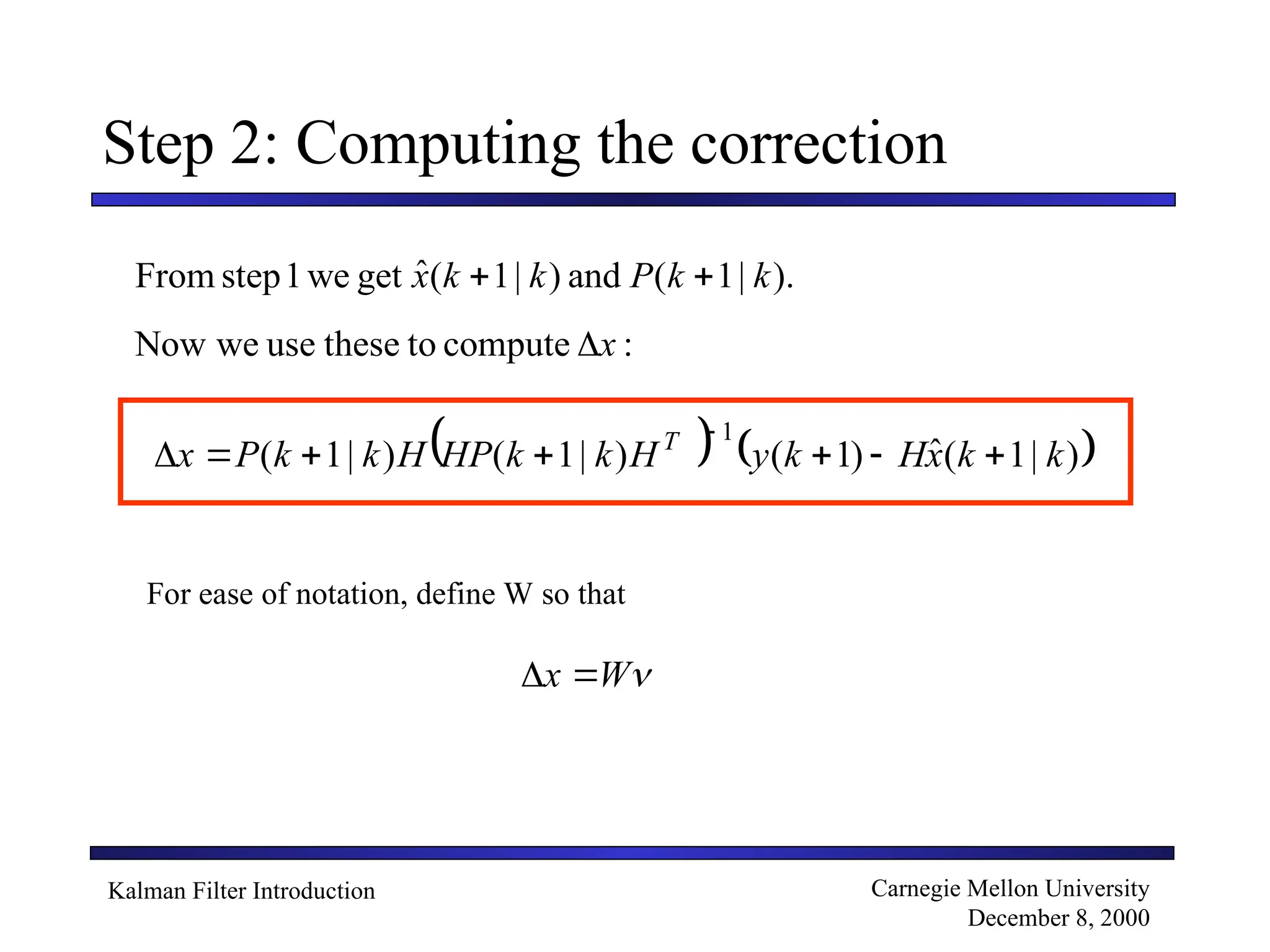
Step 2: Computing the correction
).
|
1
(
and
)
|
1
(
ˆ
get
we
1
step
From k
k
P
k
k
x
:
compute
to
these
use
we
Now x
)
|
1
(
ˆ
)
1
(
)
|
1
(
)
|
1
(
1
k
k
x
H
k
y
H
k
k
HP
H
k
k
P
x T
For ease of notation, define W so that
W
x
15.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
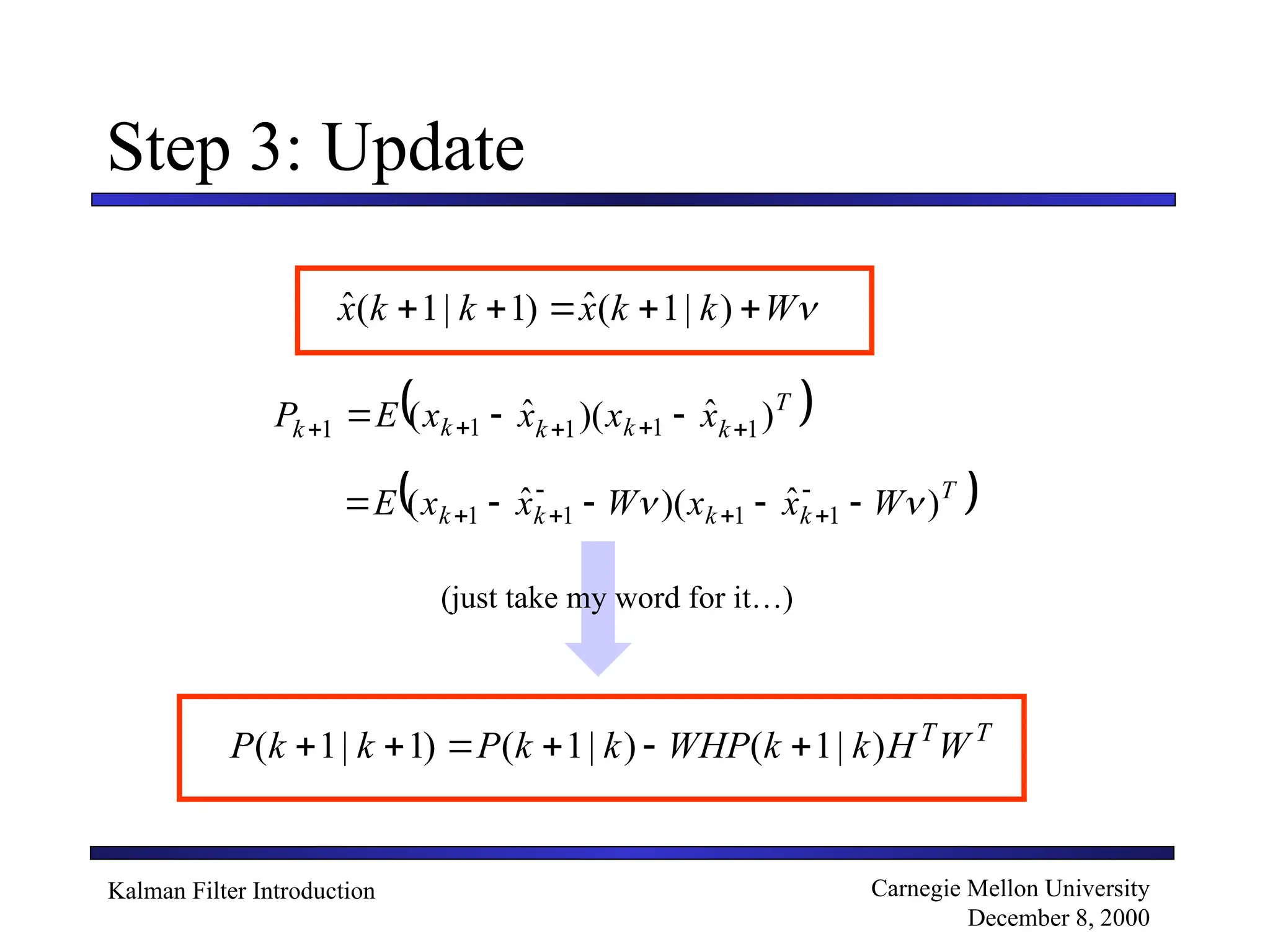
Step 3: Update
)
|
1
(
ˆ
)
1
|
1
(
ˆ
W
k
k
x
k
k
x
T
k
k
k
k
k x
x
x
x
E
P )
ˆ
)(
ˆ
( 1
1
1
1
1
T
k
k
k
k W
x
x
W
x
x
E )
ˆ
)(
ˆ
( 1
1
1
1
(just take my word for it…)
T
T
W
H
k
k
WHP
k
k
P
k
k
P )
|
1
(
)
|
1
(
)
1
|
1
(
16.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
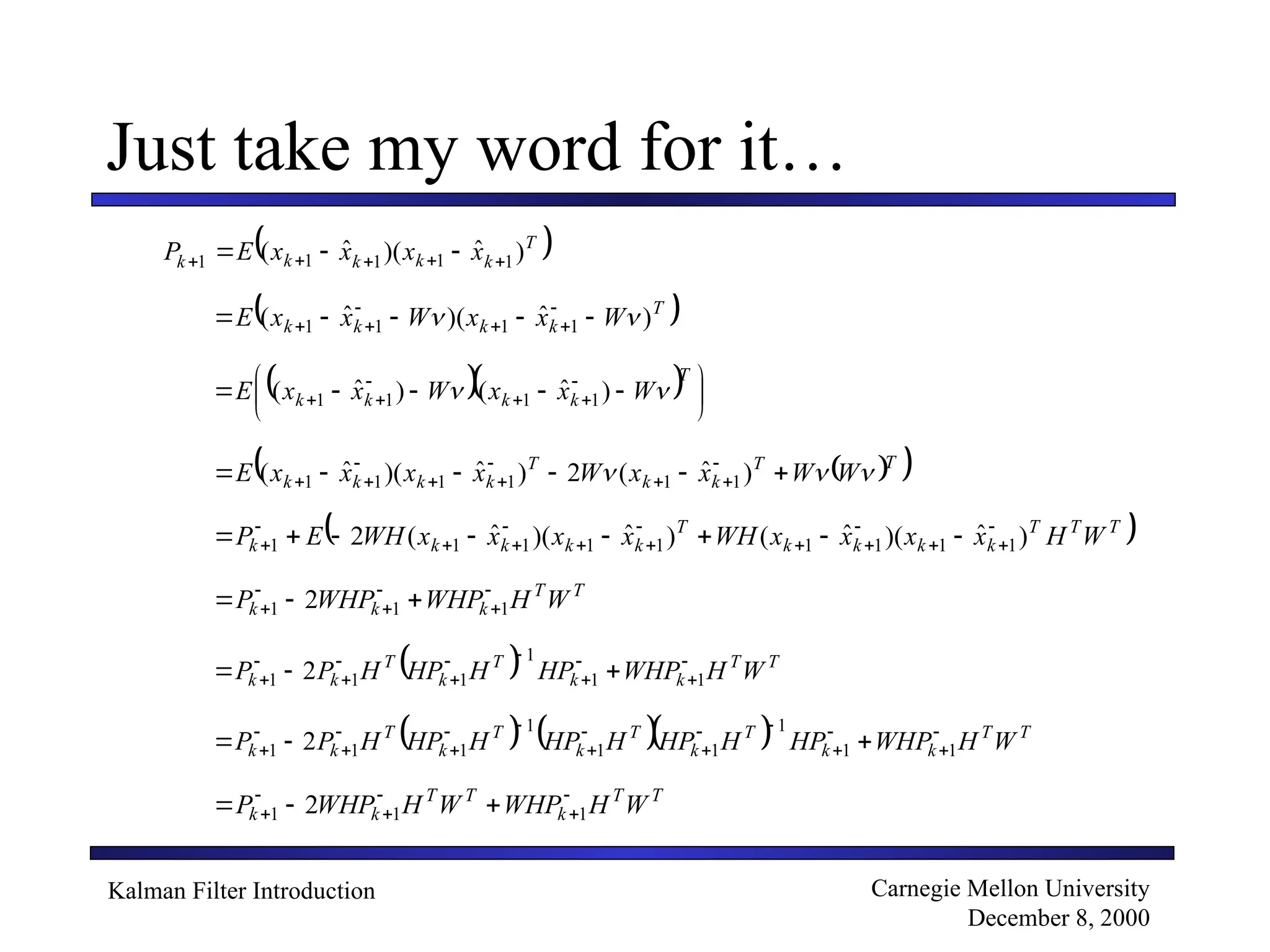
Just take my word for it…
T
k
k
k
k
k x
x
x
x
E
P )
ˆ
)(
ˆ
( 1
1
1
1
1
T
k
k
k
k W
x
x
W
x
x
E )
ˆ
)(
ˆ
( 1
1
1
1
T
k
k
k
k W
x
x
W
x
x
E
)
ˆ
(
)
ˆ
( 1
1
1
1
T
T
k
k
T
k
k
k
k W
W
x
x
W
x
x
x
x
E
)
ˆ
(
2
)
ˆ
)(
ˆ
( 1
1
1
1
1
1
T
T
T
k
k
k
k
T
k
k
k
k
k W
H
x
x
x
x
WH
x
x
x
x
WH
E
P )
ˆ
)(
ˆ
(
)
ˆ
)(
ˆ
(
2 1
1
1
1
1
1
1
1
1
T
T
k
k
k W
H
WHP
WHP
P
1
1
1 2
T
T
k
k
T
k
T
k
k W
H
WHP
HP
H
HP
H
P
P
1
1
1
1
1
1 2
T
T
k
k
T
k
T
k
T
k
T
k
k W
H
WHP
HP
H
HP
H
HP
H
HP
H
P
P
1
1
1
1
1
1
1
1
1 2
T
T
k
T
T
k
k W
H
WHP
W
H
WHP
P
1
1
1 2
17.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
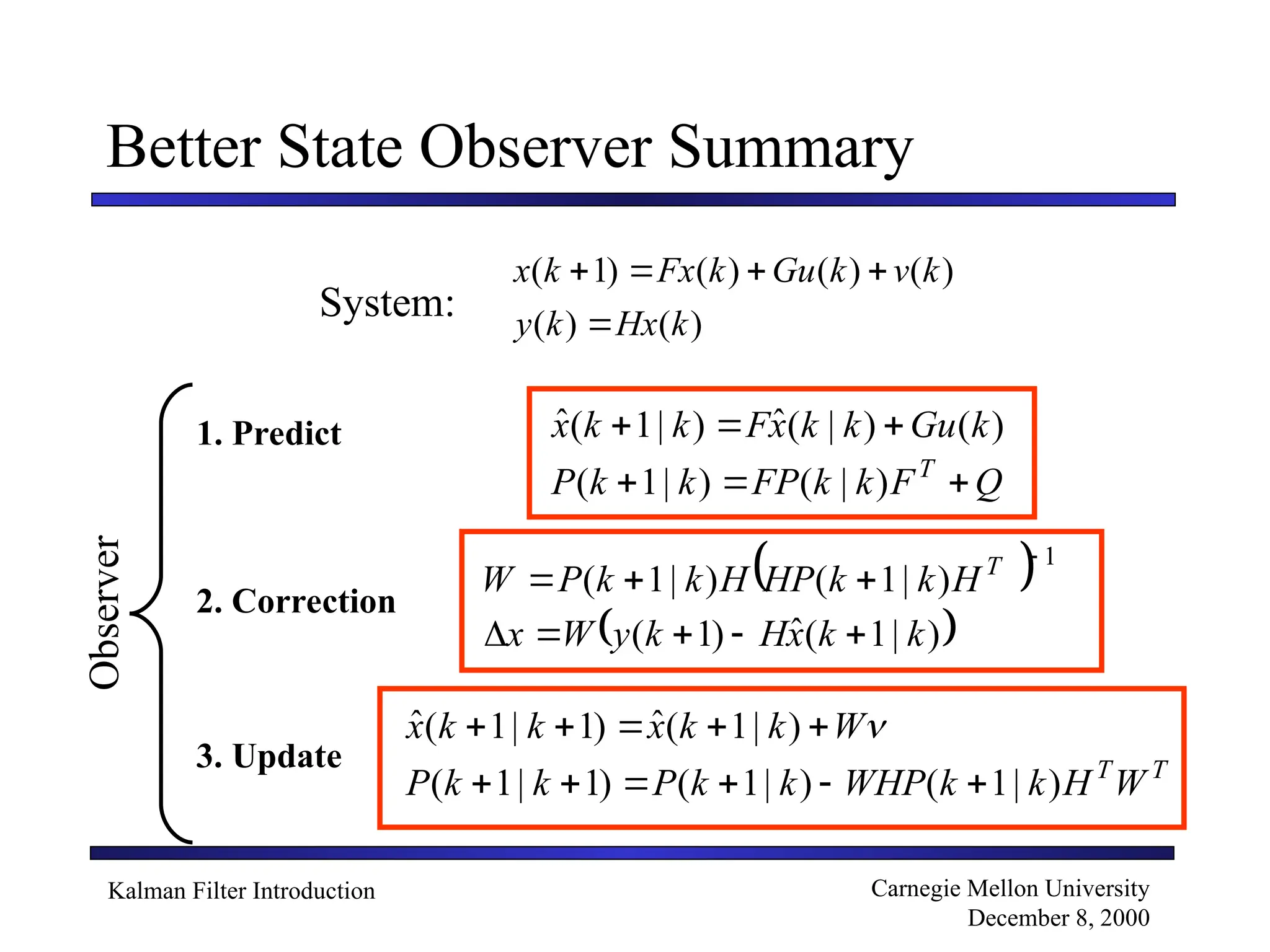
Better State Observer Summary
)
(
)
(
)
(
)
(
)
(
)
1
(
k
Hx
k
y
k
v
k
Gu
k
Fx
k
x
System:
1. Predict
2. Correction
3. Update
)
(
)
|
(
ˆ
)
|
1
(
ˆ k
Gu
k
k
x
F
k
k
x
Q
F
k
k
FP
k
k
P T
)
|
(
)
|
1
(
)
|
1
(
)
|
1
(
1
T
H
k
k
HP
H
k
k
P
W
)
|
1
(
ˆ
)
1
( k
k
x
H
k
y
W
x
)
|
1
(
ˆ
)
1
|
1
(
ˆ
W
k
k
x
k
k
x
T
T
W
H
k
k
WHP
k
k
P
k
k
P )
|
1
(
)
|
1
(
)
1
|
1
(
Observer
18.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
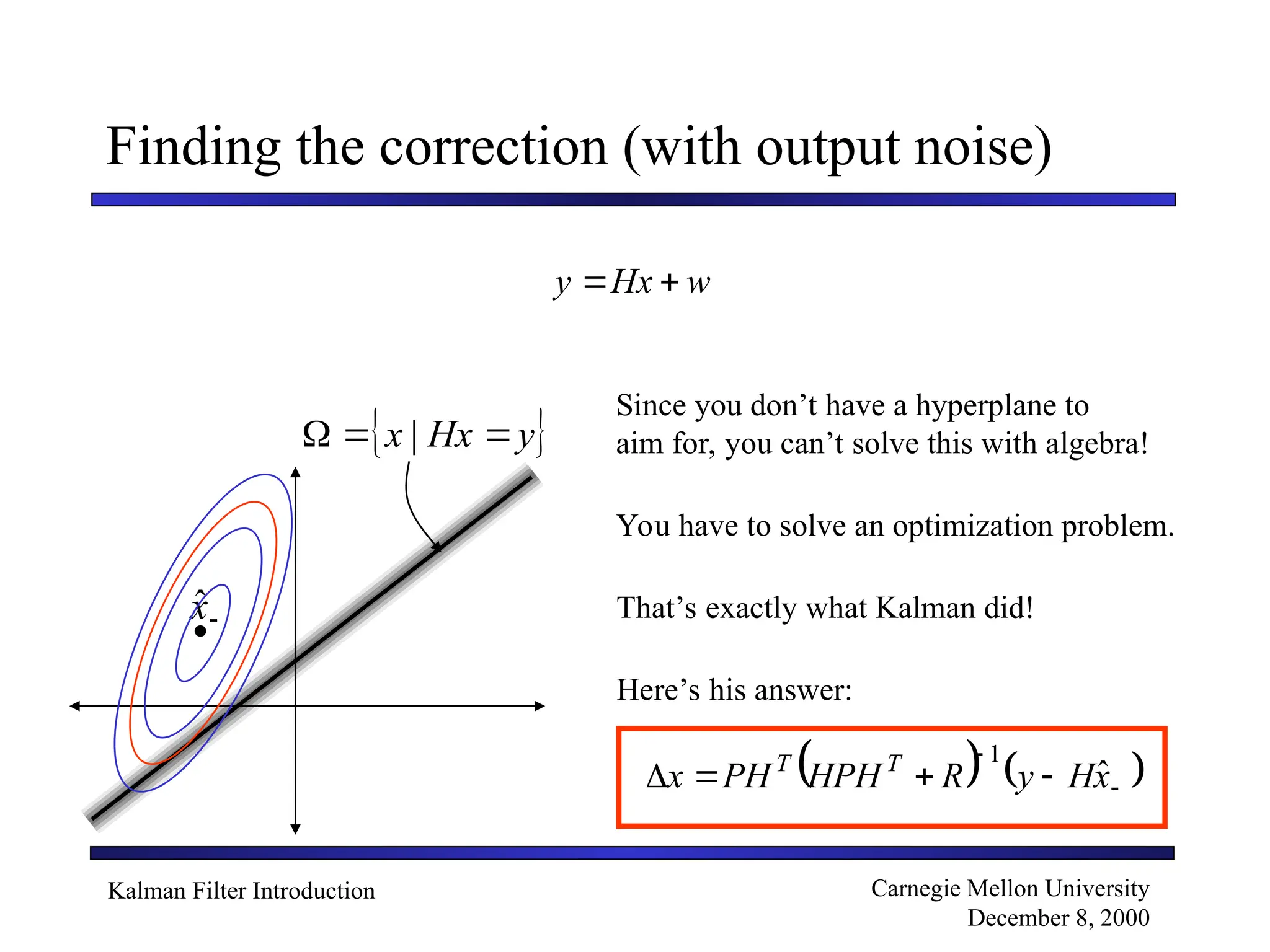
Finding the correction (with output noise)
w
Hx
y
y
Hx
x
|
x̂
Since you don’t have a hyperplane to
aim for, you can’t solve this with algebra!
You have to solve an optimization problem.
That’s exactly what Kalman did!
Here’s his answer:
x
H
y
R
HPH
PH
x T
T
ˆ
1
19.
Kalman Filter IntroductionCarnegie Mellon University
December 8, 2000
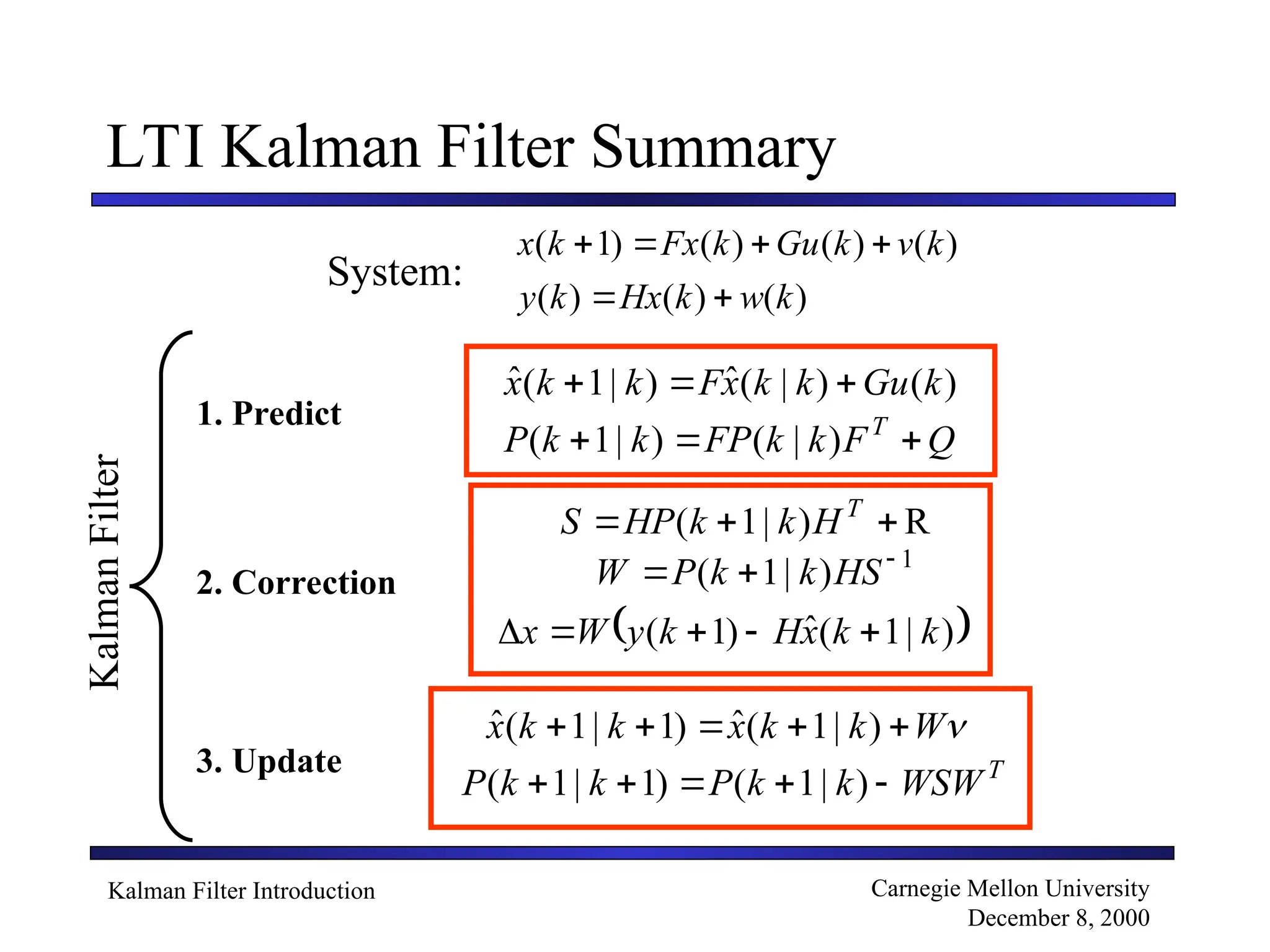
LTI Kalman Filter Summary
)
(
)
(
)
(
)
(
)
(
)
(
)
1
(
k
w
k
Hx
k
y
k
v
k
Gu
k
Fx
k
x
System:
1. Predict
2. Correction
3. Update
)
(
)
|
(
ˆ
)
|
1
(
ˆ k
Gu
k
k
x
F
k
k
x
Q
F
k
k
FP
k
k
P T
)
|
(
)
|
1
(
)
|
1
(
ˆ
)
1
|
1
(
ˆ
W
k
k
x
k
k
x
T
WSW
k
k
P
k
k
P
)
|
1
(
)
1
|
1
(
Kalman
Filter
)
|
1
( 1
HS
k
k
P
W
)
|
1
(
ˆ
)
1
( k
k
x
H
k
y
W
x
R
)
|
1
(
T
H
k
k
HP
S