The document discusses multi-objective optimization algorithms for finite element model updating using measured modal data. It presents different frameworks for structural identification, including weighted modal residuals and multi-objective formulations. Computational issues related to single-objective and multi-objective optimization are discussed. An example application to identify the parameters of a full-scale bridge model using ambient vibration data is also outlined.

![University of Thessaly
Department of Mechanical and Industrial Engineering
System Dynamics Laboratory
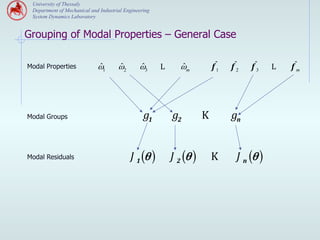
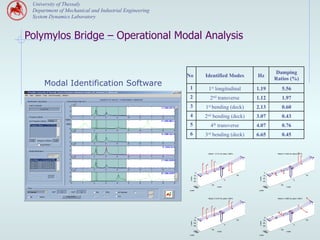
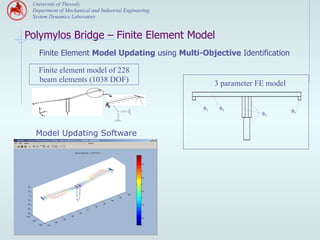
Structural Identification - Formulation
D = {ωr , f ˆr , r = 1,L , m; k = 1,L , N D }
ˆ = Available Measured Modal Data
Μ = Class of Linear Models, q = structural parameter set to be identified
ωr (θ ) , f r (θ ) , r = 1,L , m = Modal data predicted by Model, solving the Eigenvalue Problem
⎡ K (θ ) − ωr2 M (θ )⎤ f r = 0
⎣ ⎦
Problem: Find q values so that model predicted modal data are close to the measured modal data
Measure of fit (Modal Residuals):
ND
1 [ω r (θ ) − ω r( k ) ]2
ˆ
Modal Frequencies Jωr (θ ) = ∑ [ω (k ) ]2 r = 1, K , m
ND k =1 ˆr
2 N D = Number of available
ND
(k )
β φ (θ ) − φˆ (k )
1 r r r Data sets
Modeshapes Jφr (θ ) = ∑ 2
ND k =1 ˆ
φr( k ) For m modesà
maximum 2m objectives](https://image.slidesharecdn.com/isma2008-120920093430-phpapp02/85/Multi-Objective-Optimization-Algorithms-for-Finite-Element-Model-Updating-Ntotsios-and-Papadimitriou-4-320.jpg)
![University of Thessaly
Department of Mechanical and Industrial Engineering
System Dynamics Laboratory
Computational Issues – Multi Objective Optimization
" Strength Pareto Evolutionary Algorithms (SPEA) – [Zitzler and Thiele 1999]
§ Random initialized population of search points in the parameter space which by
means of selection, mutation and recombination evolves towards better and better
regions in the search space
§ Clustering techniques are used to uniformly distribute points along the Pareto front,
provided that the values of objectives are of the same order of magnitude along the
Pareto front
§ Require user-defined initial estimates
§ Slow convergence in the neighborhood of the Pareto front
" Normal Boundary Intersection Method (NBI) – [Das and Dennis 1998]
§ Deterministic algorithms based on gradient methods
§ Produces an evenly spread of points along the Pareto front
§ Fast convergence
§ Computationally expensive for more than 3 objectives](https://image.slidesharecdn.com/isma2008-120920093430-phpapp02/85/Multi-Objective-Optimization-Algorithms-for-Finite-Element-Model-Updating-Ntotsios-and-Papadimitriou-11-320.jpg)
![University of Thessaly
Department of Mechanical and Industrial Engineering
System Dynamics Laboratory
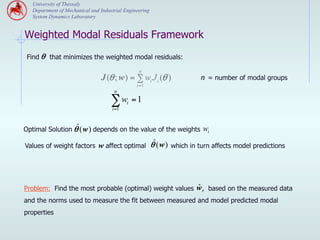
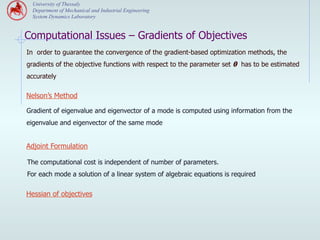
Polymylos Bridge - Model Updating Results
3 parameters Multi-Objective model updating using 3 modes
ND
1 [ωr (q ) − ωr k ) ]2
ˆ(
J1 (q ) = ∑
ND [ωr k ) ]2
ˆ(
Objective and parameters space
k =1
2
ND ˆ
β r( k )φr (q ) − φr( k )
1
0.072 1.8 J 2 (q ) = ∑ 2
Pareto Solutions 20
19 ND k =1 ˆ
φr( k )
0.07 w=1 18
1 1.6
2 17
0.068 3 16 Equally weighted method parameter values
4 Pareto Solutions
1.4
θ1 (E bearings) 3.6872
2
5
2
15
θ
J
6 w=1
0.066
7
8 14 θ2 (E deck) 1.1293
9 1.2 13
0.064
10
11 12 12 θ3 (E pier) 0.6425
13 14 10 11
15 16 17 18 19 20 7 8
9 J1(mode frequencies) 0.0347
0.062 1 123 4 5 6
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 3.3 3.4 3.5 3.6 3.7 3.8 J2 (mode shapes) 0.0635
J θ
1 1 3.8
3.6
3.4
1 1
3.2
θ
3 1
Pareto Solutions
12 3 4 5 25
14
3 2.8 θ
2
0.8 6 7 0.8 67 w=1 2.6
8 9 89 θ
10 10 2.4 3
11 11 2.2 θw =1
12 12
θ value
0.6 13 0.6 13 2
Pareto Solutions 1.8
14 14
3
3
θ
θ
w=1 15 15 1.6
0.4 16 0.4 16 1.4
17 17 1.2
18 18 1
19 19
0.2 20 0.2 20 0.8
0.6
0.4
0 0 0.2
3.3 3.4 3.5 3.6 3.7 3.8 1 1.2 1.4 1.6 1.8
5 10 15 20
θ θ # of solutions
1 2](https://image.slidesharecdn.com/isma2008-120920093430-phpapp02/85/Multi-Objective-Optimization-Algorithms-for-Finite-Element-Model-Updating-Ntotsios-and-Papadimitriou-16-320.jpg)