This document discusses various techniques for computing the inverse z-transform, including inspection method, power series expansion, partial fraction expansion, and residue method. It provides examples of applying each technique to find the inverse z-transform of given functions. Key steps involved are factorizing rational functions, identifying poles, and calculating residues to determine the original time-domain sequence from its z-transform.
![17-Jan-23
U18ECT3101 - Signals and Systems The Z Transform Properties
4
U18ECT3101 - Signals and Systems The Inverse Z Transform
The Inverse Z transform
• Given X(z), find the sequence x[n] that has X(z) as its z-transform.
• By Z- Transform pair x[n] is given by
• We need to specify both algebraic expression and ROC to make the inverse Z-transform unique.
• Techniques for finding the inverse z-transform:
Inspection Method
Power series Method
Residue Method,
Long Division Method
Partial Fraction methods
𝒙 𝒏 =
𝟏
𝟐𝝅𝒋 𝑪
𝒛𝒏−𝟏𝑿 𝒛 𝒅𝒛](https://image.slidesharecdn.com/5-230117164411-b698d50e/75/5-4_Inverse-Z-Transform-pptx-4-2048.jpg)
![17-Jan-23
U18ECT3101 - Signals and Systems The Z Transform Properties
5
U18ECT3101 - Signals and Systems The Inverse Z Transform
5.4.1 Inspection Method
In order to find the inverse z transform we compare 𝑋(𝑧) to one of the standard transform pairs
Eg. Find the inverse z-transform of
From the transform pair
x[n] = 0.5nu[n].
1
5
0
1
1
z
z
X
.](https://image.slidesharecdn.com/5-230117164411-b698d50e/75/5-4_Inverse-Z-Transform-pptx-5-2048.jpg)
![17-Jan-23
U18ECT3101 - Signals and Systems The Z Transform Properties
6
U18ECT3101 - Signals and Systems The Inverse Z Transform
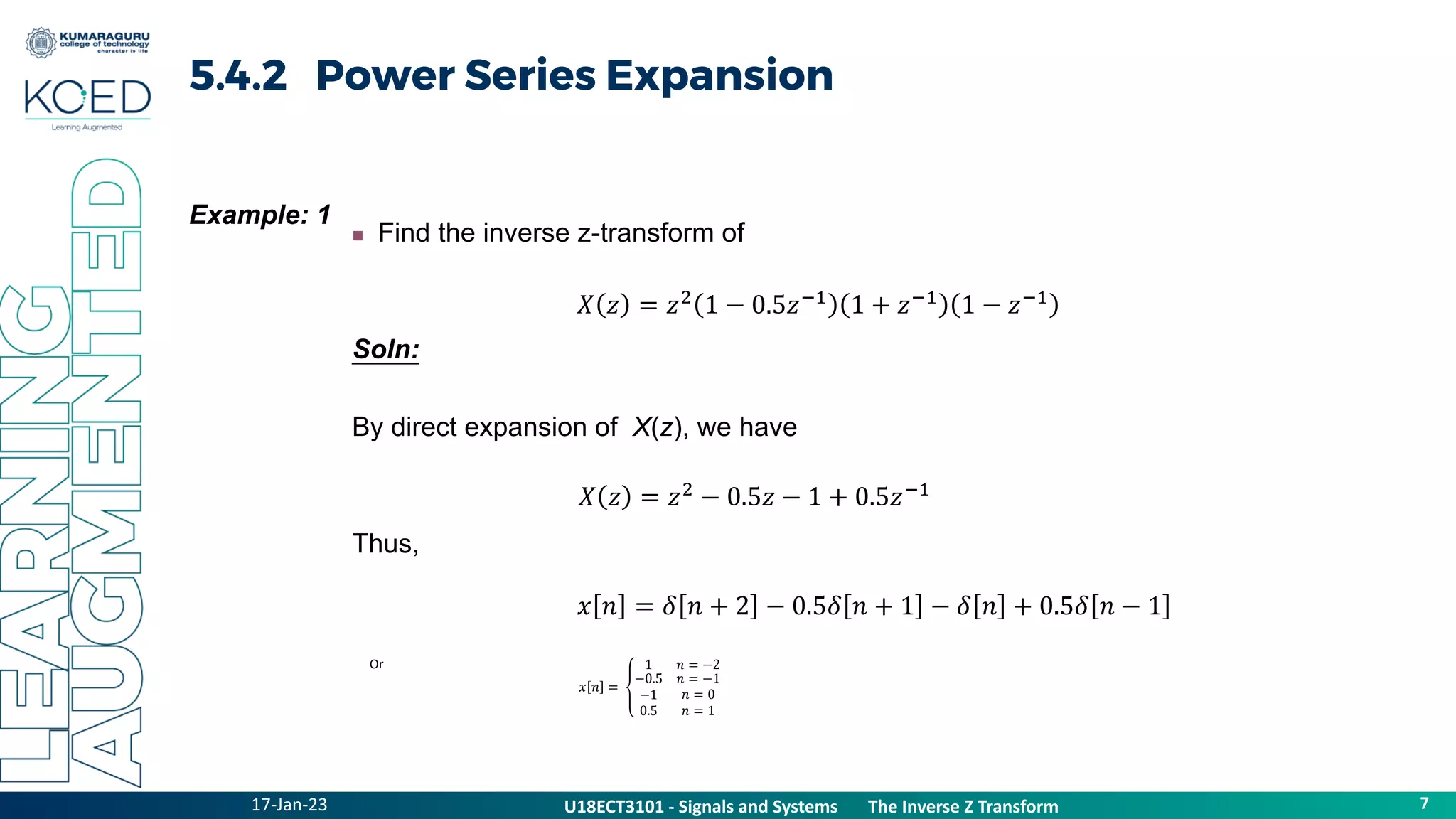
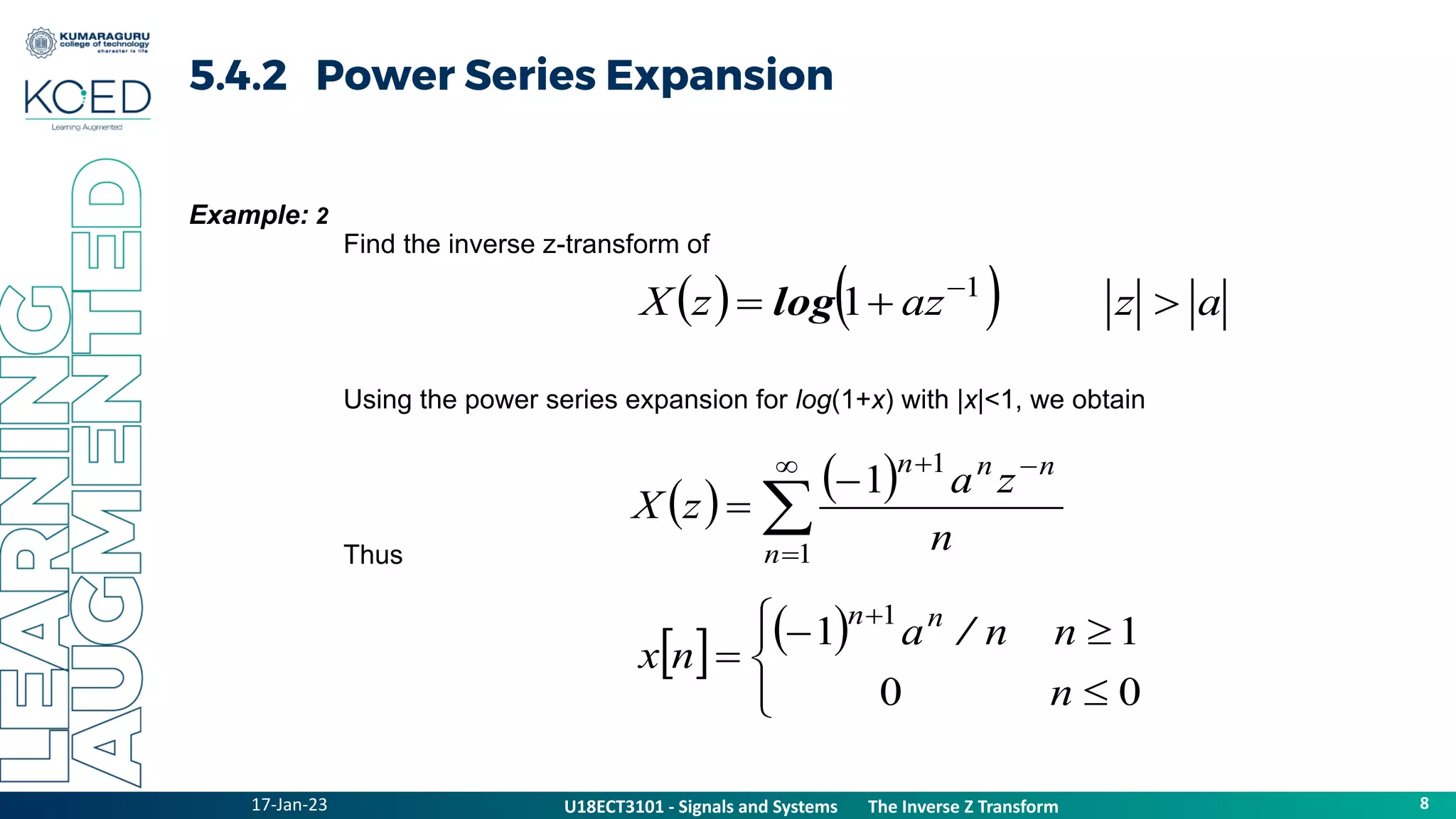
5.4.2 Power Series Expansion
𝑋 𝑧 =
𝑛=−∞
∞
𝑥 𝑛 𝑧−𝑛
By Definitions The z-Transform of a signal x[n] is given by
𝑋(𝑧) =. . . +𝑥 −2 𝑧2
+ 𝑥 −1 𝑧 + 𝑥 0 + 𝑥 1 𝑧−1
+ 𝑥 2 𝑧−2
+. . .
Expanding the above equation
Any particular value of the sequence is determined by finding the coefficient of the appropriate power of 𝑧−1
This method is used .
• For Finite length sequence
• X(z) expressed as polynomial in positive and negative powersof z.](https://image.slidesharecdn.com/5-230117164411-b698d50e/75/5-4_Inverse-Z-Transform-pptx-6-2048.jpg)
![5.4.3.2 Inverse Z-Transform by Long Division
• Consider:
Solution:
4
2
1
)
( 3
2
z
z
z
z
X
1
1
1
2
2
3
4
3
4
2
1
4
2
z
z
z
z
z
z
z
3
2
1
3
2
1
3
2
1
1
2
2
3
3
0
12
6
4
12
6
3
4
3
4
2
1
4
2
z
z
z
z
z
z
z
z
z
z
z
z
z
z
4
3
2
1
4
3
2
4
3
1
3
2
1
3
2
1
1
2
2
3
4
3
0
16
20
6
16
8
4
12
6
4
12
6
3
4
3
4
2
1
4
2
z
z
z
z
z
z
z
z
z
z
z
z
z
z
z
z
z
z
z
z
z
...
]
4
[
4
]
3
[
3
]
1
[
1
]
[
0
]
[
...
4
3
0
)
( 4
3
2
1
n
n
n
n
n
x
z
z
z
z
z
X
](https://image.slidesharecdn.com/5-230117164411-b698d50e/75/5-4_Inverse-Z-Transform-pptx-10-2048.jpg)
![17-Jan-23
U18ECT3101 - Signals and Systems The Z Transform Properties
21
U18ECT3101 - Signals and Systems The Inverse Z Transform
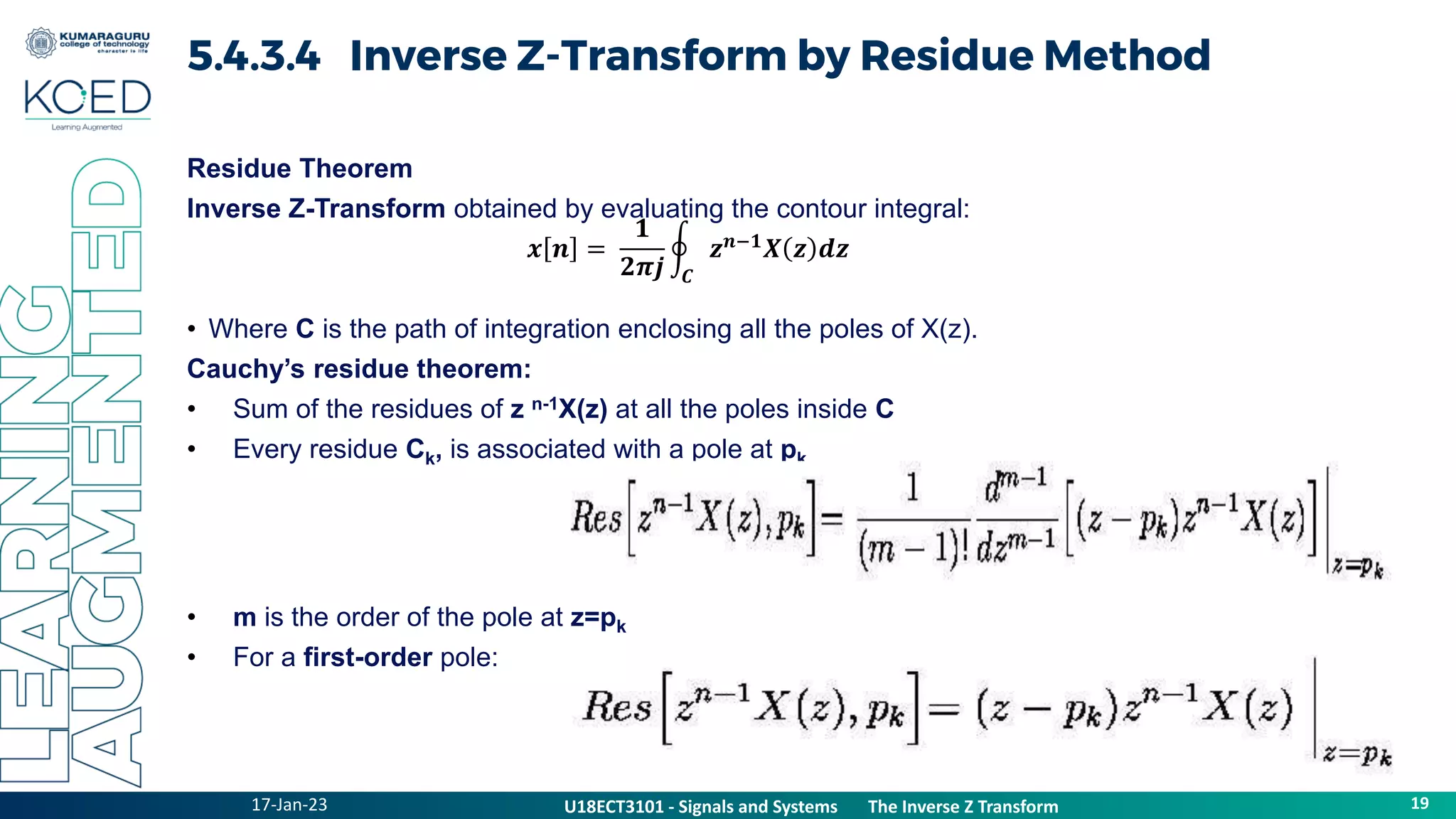
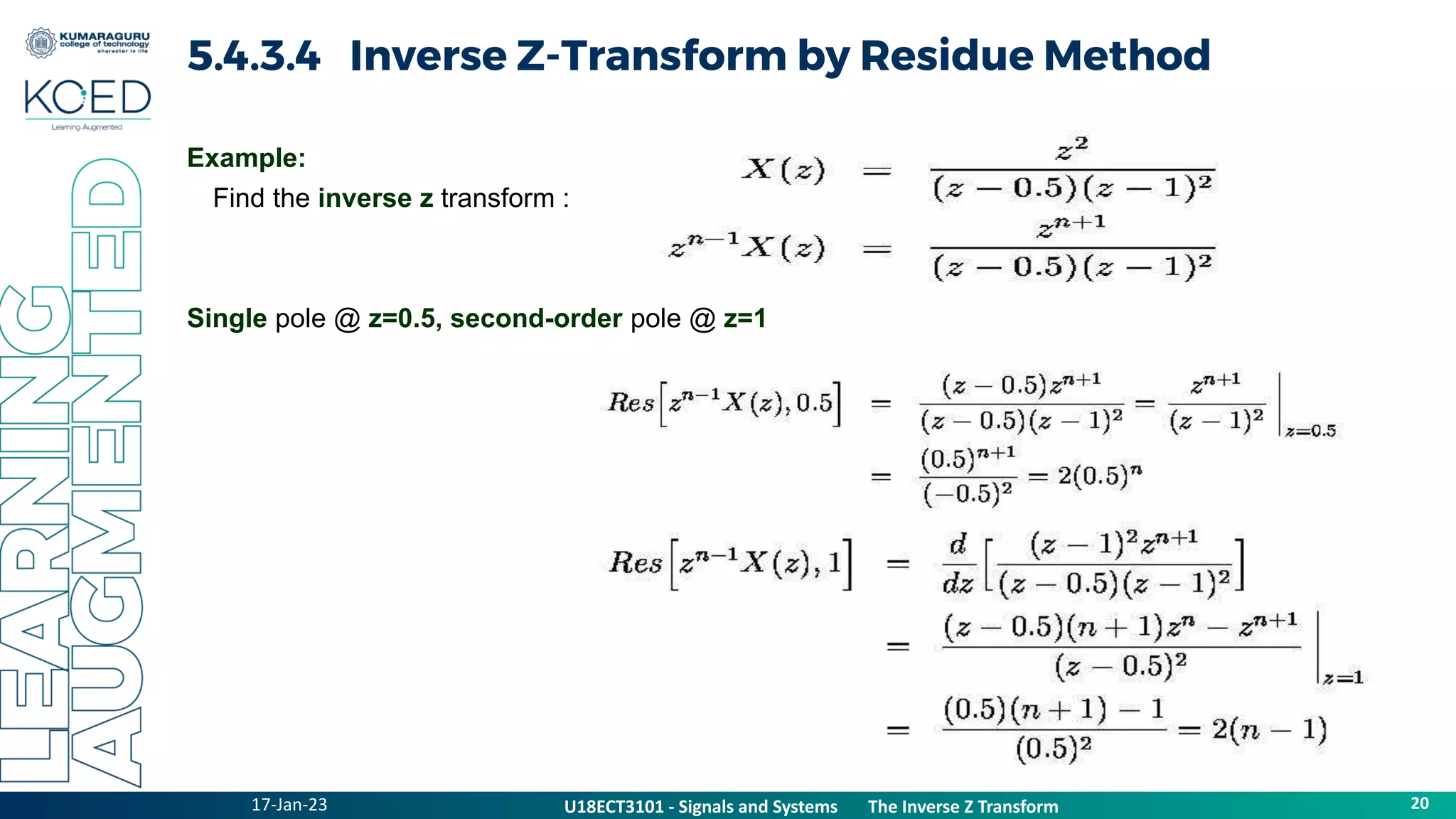
5.4.3.4 Inverse Z-Transform by Residue Method
Example:
Find the inverse z transform :
Single pole @ z=0.5, second-order pole @ z=1
x(n)=2[(n-1)+(0.5)n]](https://image.slidesharecdn.com/5-230117164411-b698d50e/75/5-4_Inverse-Z-Transform-pptx-21-2048.jpg)