Downloaded 18 times



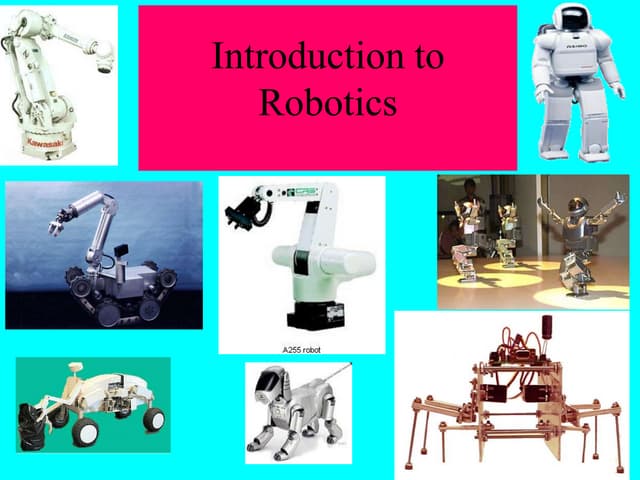
The document provides an outline of robotics, covering what robots are, their history, key components, and applications across various industries. It discusses the definitions of robots, the laws of robotics proposed by Asimov, and highlights the evolution of robotics from the first industrial robot to modern applications in fields like healthcare and manufacturing. The future of robotics is also addressed, mentioning advancements in artificial intelligence and autonomous systems.