Lucrarea metodică elaborată de Universitatea Tehnică a Moldovei oferă indicații pentru studenți în rezolvarea problemelor de mecanică clasică, accentuând importanța legăturii dintre teorie și practică. Structurată în cinci paragrafe, aceasta include teorii, probleme rezolvate și exerciții, destinat dezvoltării abilităților de rezolvare a problemelor fizice. Lucrarea îndeamnă cititorul să participe activ în procesul de învățare prin aplicarea cunoștințelor teoretice la probleme concrete.






































































































![116
§5. Elemente de mecanică a fluidelor
5.1 Indicații metodice
Problemele incluse în acest paragraf se referă la mecanica
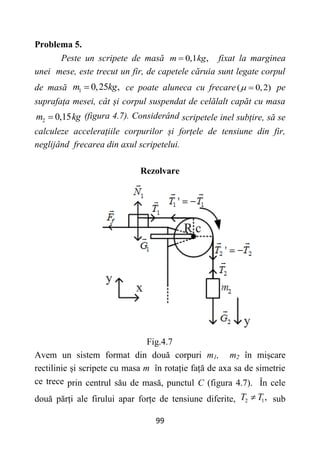
(statica și dinamica) fluidelor ideale, numite și perfecte, aflate în
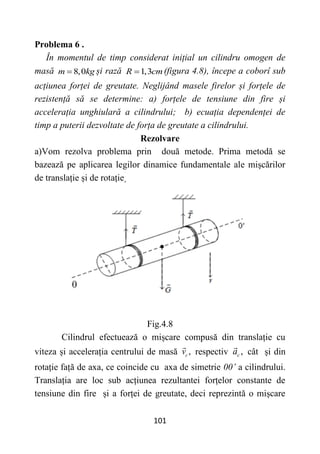
repaus sau în curgere staționară. Pentru a facilita înțelegerea
condițiilor în care au fost rezolvate problemele ce urmează și în care
trebuie să se rezolve problemele propuse, prezentăm o descriere
succintă a clasificării fluidelor.
Caracteristicile de bază ale fluidelor sunt: densitatea, presiunea,
viteza de curgere și vâscozitatea. Fluidele omogene, fără vâscozitate
și perfect incompresibile, adică cu densitatea constantă în timp și
independentă de poziția punctului considerat în fluid, se numesc
ideale și reprezintă o primă aproximare a fluidelor reale. Atragem
atenția că această definiție se referă la fluide, adică la lichide –
medii continui cu o compresibilitate extrem de mică, adică practic
incomprimabile, cât și la gaze – medii continui cu o compresibilitate
considerabilă. Dacă se definește lichidul ideal (de exemplu, în [1])
atunci condiția de incompresibilitate nu mai este necesară, fiind
impusă doar condiția de absență a vâscozității. Deși sunt
compresibile, gazele în mișcare pot fi considerate incompresibile
dacă viteza lor v este mică în comparație cu viteza sunetului vs în
gazul respectiv, adică dacă numărul lui Mach, M=v/vs < 0,3. Dacă
această condiție se respectă, densitatea gazului variază doar cu
aproximativ 3%. Fluidele numite reale au vâscozitate – proprietate a
fluidului de a se opune alunecării unui strat de fluid față de straturile
vecine. Ca rezultat, în fluidul vâscos apar forțe tangențiale de
interacțiune între straturile vecine, numite forțe de frecare interne.](https://image.slidesharecdn.com/indicaiimetodice1-211103061355/85/Indica-ii-metodice-1-116-320.jpg)